BP神经网络在极移预报中的应用*
2015-04-04张志,廖瑛,余越
张 志,廖 瑛,余 越
(1.国防科技大学航天科学与工程学院,湖南长沙 410073;2.海军蚌埠士官学校4系,安徽蚌埠 233012)
极移是表征地球自转的一个重要物理量,它与岁差、章动和日长变化一起构成地球定向参数(Earth Orientation Parameters,EOP),它在航天器轨道确定、卫星导航定位等领域有重要的应用[1]。现代空间大地测量技术(卫星激光测距、甚长基线干涉测量、全球定位系统等)是目前极移参数获取的主要手段,但是由于复杂的分析处理过程,不能实时获取测量数据,因此,有必要对以极移为代表的EOP参数进行预报。
在极移预报方面,学者们提出了很多有意义的方法。Zhu[2]和 Chao[3]采用确定和不确定周期项构建最小二乘谐波模型进行极移预报;Kosek[4-5]将自回归模型应用于最小二乘残差序列中,采用LS模型与自回归模型组合方法进行预报。前述方法均为线性模型预报,随着非线性科学的发展,以神经网络等为代表的非线性预报方法和理论研究取得了一些突破性的进展。1992年,Egger[6]首先将神经网络应用于地球自转参数(Earth Rotation Parameters,ERP)的预报中;之后Egger和 Frehlich[7]又将该方法与 Fröehlich 的完全解析方法相比较,结果验证了神经网络在预报ERP上与完全解析方法的一致性,显示了神经网络在预报不规则和准周期过程中的巨大潜力;近年来,Schuh[8]、Liao[9]和王琪洁[10]均采用神经网络技术进行EOP的预报:Schuh和Liao分别采用斯图加特神经网络模拟软件和简化的三层神经网络结构对EOP进行预报,王琪洁在极移预报中采用“先—后—最佳拓扑”的方式进行预报,三位学者均取得了比较好的预报效果。
文献[9]采用简化的三层网络结构对EOP作了短期与中长期预测,其中,输入层选择了6个神经元,输出层选择了12个神经元,即该神经网络结构为多输入-多输出结构。文献[9]中每个输入样本的节点数为6个,而网络的输出预报点数比输入节点还多,在输出预报精度上不能很好保证。由此,考虑增加每个输入样本的节点数并减少神经网络的输出预报点数是提高预报精度的有效方法之一。文中对极移数据的特点进行了研究,根据极移数据的特点首先对极移序列重采样处理,将得到的新序列进行频谱分析验证了重采样间隔的合理性,提取新序列的趋势项,然后采用多输入-单输出BP神经网络对新序列残差进行不同跨度预报,组合趋势项和残差预报得到最终的极移预报值。
1 频谱分析
进行频谱分析用到的数据来源于国际地球自转和参考系服务(International Earth Rotation and Reference Systems Service,IERS)发布的EOPC04序列①。该序列包含 1962年1月 1日(MJD 37665)至今的极移(包括x和y分量,分别简写为PMX和PMY)、世界时UT1-UTC和日长LOD数据等,采样间隔为1天。
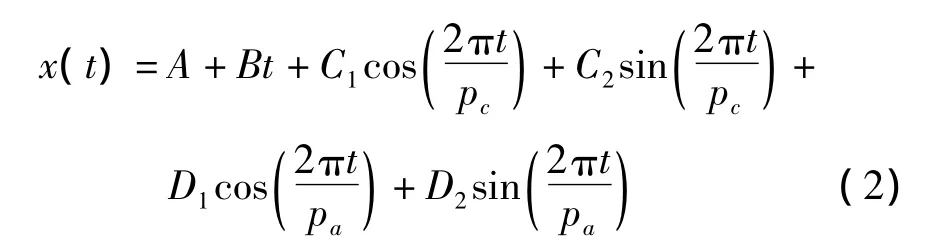
本文研究的是极移预报,所以要研究极移数据的周期性变化特性,也就是频率域上的特征,选用傅里叶分析方法,离散傅里叶变换公式为:

其中,k=1,2,…,N;i是虚数单位;x 是观测时间序列,此处为极移分量序列;N是时间序列x的长度。
首先对EOP C04序列数据(一般地,对采样间隔为1d的极移数据,称为基础序列)进行傅里叶变化,得到傅里叶变换幅值谱如图1、图2所示。然后对EOPC04序列进行重采样,选取采样间隔为10d的极移序列(称为插值基础序列)进行傅里叶分析,得到的傅里叶变化幅值谱如图3,4所示。
由图1~图4可知,重采样得到的10d间隔极移数据的幅值谱图与基础序列为1d间隔的幅值谱图基本一致,均出现两个明显的周期-振幅峰值,说明极移是具有周期特性的,相应的峰值横坐标对应于极移的周期值,考虑到周期的大小(钱德勒周期大于周年周期),两个周期分别对应周年周期和钱德勒周期。其中as表示角秒,重采样得到极移的幅值谱分析很好地符合基础序列特性,表现了极移的周期特性,因而,在对极移处理过程中可以采用采样间隔为10d的极移数据。在极移预报中,这大大减少了极移数据点数目以及随后的计算处理时间。
2 极移模型
根据前述频谱分析结果,极移的三角函数模型形式表示如式(2)所示。
式中,x(t)是给定历元t时的极移趋势项;A,B,C1,C2,D1,D2是待求参数;pc和 pa分别为钱德勒摆动和周年摆动的周期。
采用插值基础序列观测值对式(2)进行最小二乘拟合[11],可知极移趋势项x(t)包括线性趋势项A+Bt,钱德勒项(含 pc项)和周年项(含 pa项)三个部分。扣除趋势项的插值基础序列观测值称为残差序列数据,接下来将采用BP神经网络模型处理得到的残差序列。
3 BP神经网络
由于提取趋势项后的残差序列数据具有非线性特性,采用BP神经网络建模预报是因其具有逼近非线性函数能力强和网络收敛速度快的优点。
BP神经网络的本质是找出输入和输出之间未知但又存在的函数关系。从输出层节点个数分类可以将BP网络划分为两种结构:有多个输出节点的神经网络结构[8-9],这是当前地球定向参数预报中比较常见的一种结构,即多输入-多输出结构;另外一种结构是多输入-单输出结构,即只有一个输出节点的网络结构,这是本文研究的内容。
多输入-单输出BP神经网络的基本结构如图5所示,这是一种前向网络,输入层由信号源节点组成,第二层为隐含层,第三层为输出层,它对输入模式的作用做出响应。
由图5所示,要精确预报数据需要采用与输出相关性好的参数作为输入,分析极移数据发现,极移残差序列的变化是一个渐变的过程,因此,根据历史变化趋势来预测后面的输出可以得到较好的效果。文中构建的神经网络结构是以若干连续实际值作为输入值,预报下一时刻的输出值。预报模型表示为:
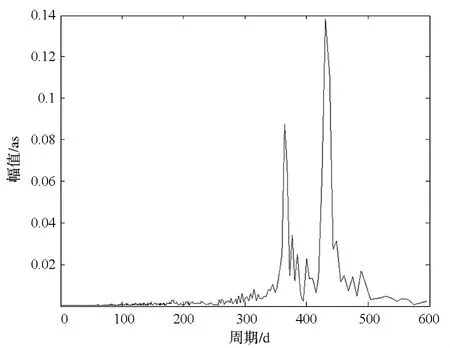
图1 基础序列分量x的幅值谱Fig.1 Amplitude spectrum of PMX for basic series
图2 基础序列分量y的幅值谱Fig.2 Amplitude spectrum of PMY for basic series

图3 插值基础序列分量x的幅值谱Fig.3 Amplitude spectrum of PMX for interpolated basic series

式中,x(t)为给定历元t时的残差数据,x(t-1)为最近的过去时刻的数据,两者时间间隔为10d;r为输入节点数;F为由神经网络确定的输入-输出映射关系。
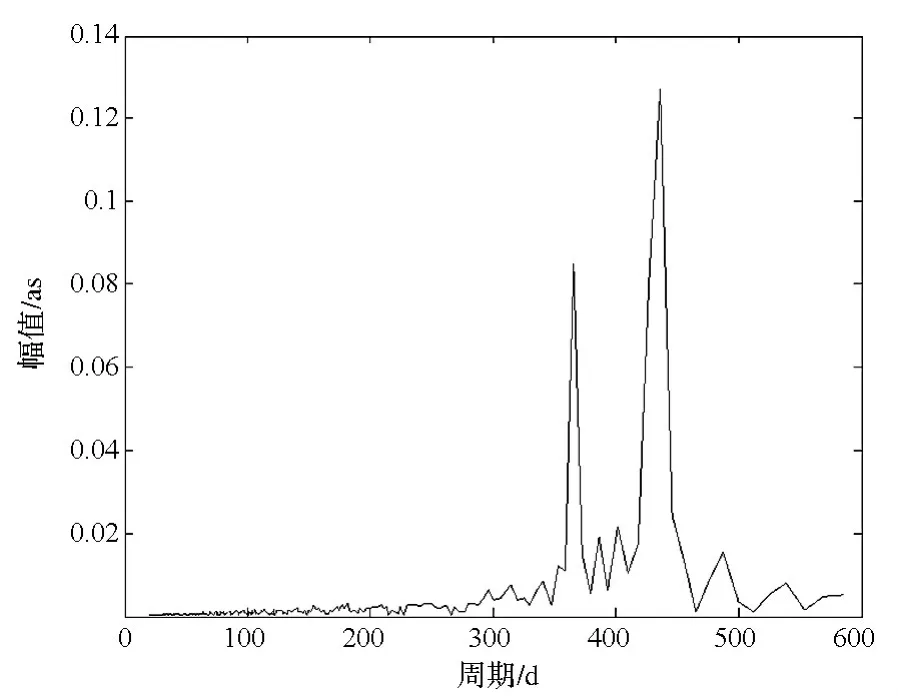
图4 插值基础序列分量y的幅值谱Fig.4 Amplitude spectrum of PMY for interpolated basic series
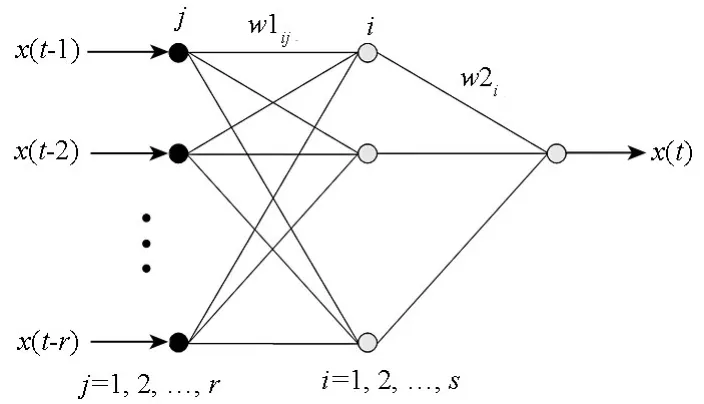
图5 BP神经网络结构Fig.5 Structure of BP neural network
输入节点数r,即历史数据长度的选择对输出有很大的影响,r的取值范围为5≤r≤15。隐含层节点数s的取值范围为1≤s≤round(s max),round是四舍五入取整符号,s max的取值[12]为:

式中,n为输出层节点数,n的取值为1。输入节点数r和隐含层节点数s根据神经网络的性能在各自取值范围内进行调整,本文根据全局误差准则来训练[13],以使BP网络拟合训练数据最佳。
4 误差精度评定
极移预报结果常用的误差精度评定标准有平均绝对误差(Mean Absolute Error,MAE)和均方根误差(Root Mean Squared Error,RMSE)[14],则预报跨度为i的MAE和RMSE的计算公式为:
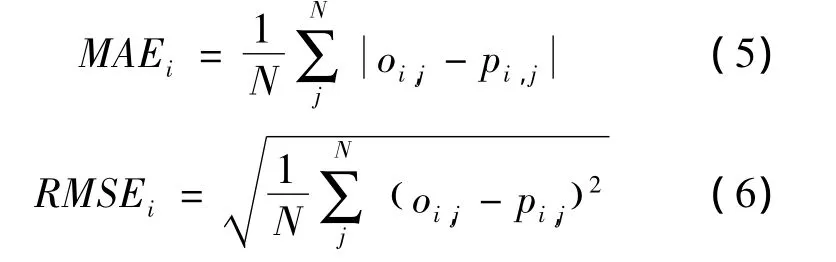
其中,N为预报次数,o为极移观测值,p为预报值,在本文研究中i=10,20,…,360,即预报跨度i的取值为10~360d。
5 预报结果及讨论
运用训练好的BP神经网络模型对残差序列作不同跨度预报,预报后的数据加上极移趋势项,得到最终的极移预报值。为更好地进行试验精度比对,选用文献[9]中的预报时间区间、预报结果用于比较分析。第一次预报时间为2001年4月6日(MJD 52005)到2002年3月31日(MJD 52364),预报跨度为360d的极移;接着数据序列向前推移91d,继续重复以上形式到下一个预报期间,最终共计预报37次,最后一次预报区间为2010年3月26日(MJD 55281)到2011年3月20日(MJD 55640)。限于篇幅,表1只列出了跨度为10~120d预报结果的MAE和RMSE。图6~图9绘出了本文方法与文献[9]中方法的极移预报结果的MAE和RMSE值,其中mas表示毫角秒。
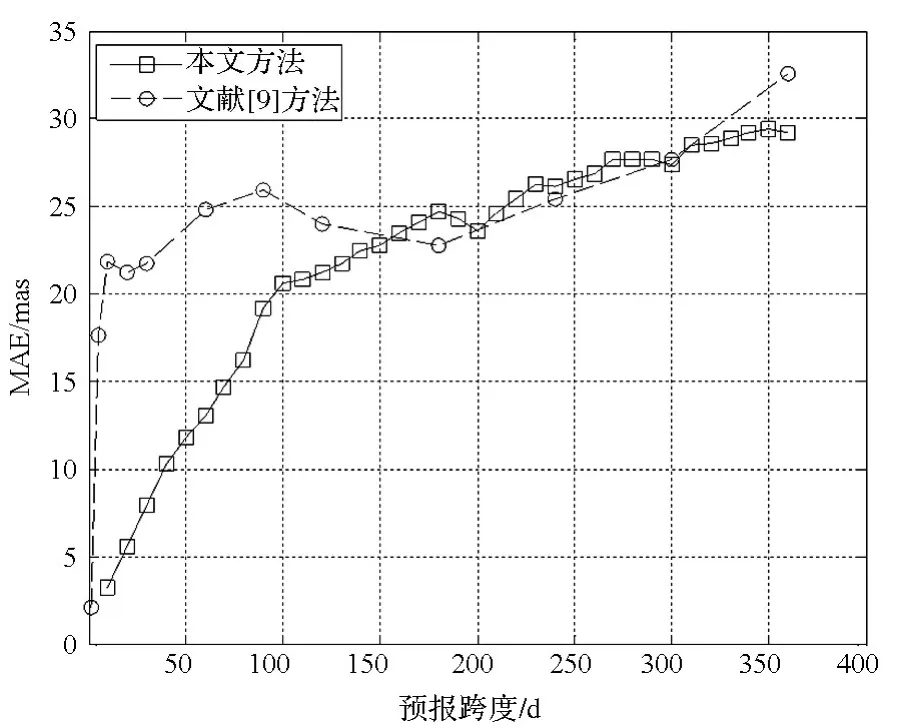
图6 PMX预报的MAEFig.6 MAE of the predictions of PMX
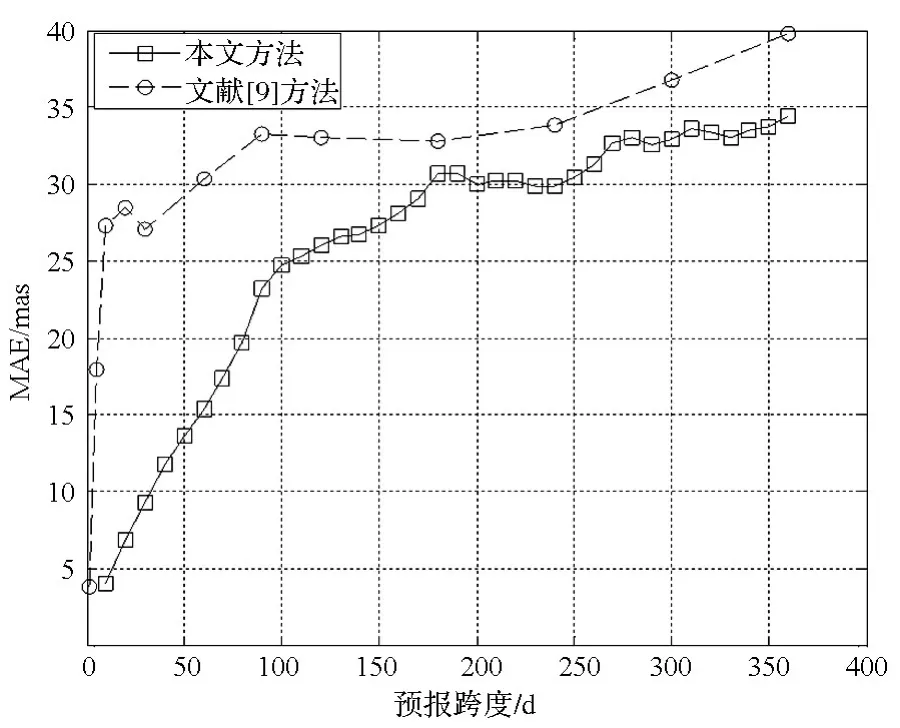
图7 PMX预报的RMSEFig.7 RMSE of the predictions of PMX
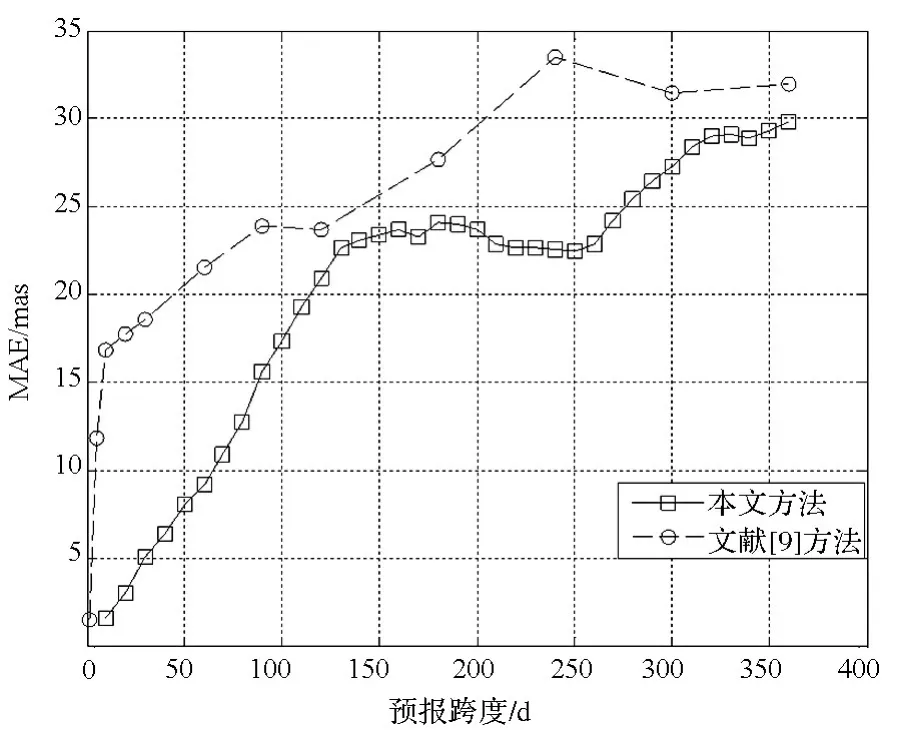
图8 PMY预报的MAEFig.8 MAE of the predictions of PMY
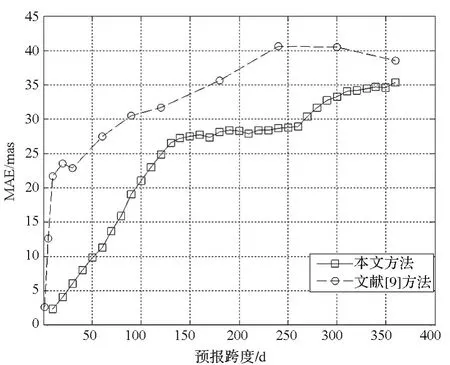
图9 PMY预报的RMSEFig.9 RMSE of the predictions of PMY
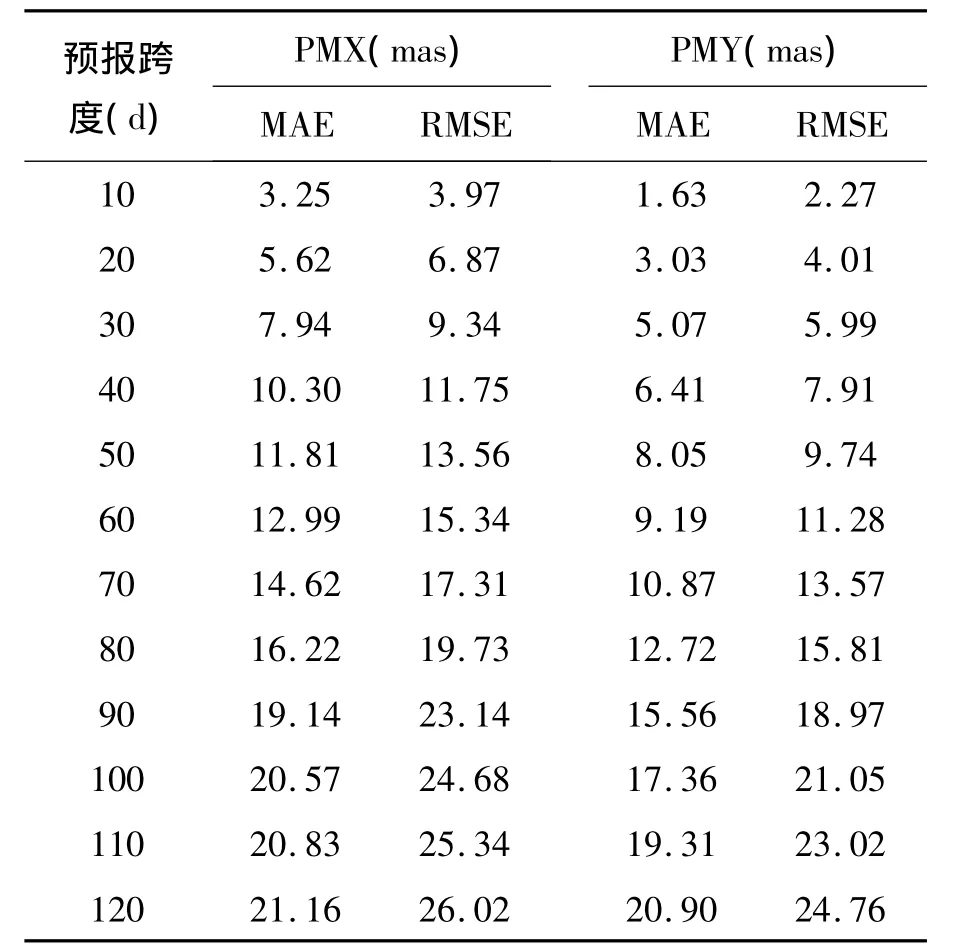
表1 极移预报的MAE和RMSETab.1 MAE and RMSE of the prediction for x and y components of polarmotion(PMX,PMY)
由表1可以看出,对于10~120d的预报跨度,本文方法在极移分量x,y的预报中MAE小于22mas,RMSE小于27mas。综合图6~图9可知,10~120d的预报跨度,较文献[9]方法,本文方法具有明显优势。对于10~360d的跨度,采用本文方法的极移预报RMSE值优于文献[9]中的结果,这说明本文极移预报方法稳定性更好。极移y分量预报的MAE值优于文献[9]中的结果,极移x分量的MAE在跨度150d之前和300d之后优于文献[9],而在150~300d之间精度相当。
结合图表可以看出,运用BP神经网络方法预报极移得到了很好的精度,这主要得益于插值基础序列采用了10d间隔的极移数据,在不损失数据信息的情况下可以选取更多的插值基础序列数据预报下一时刻数据。BP神经网络模型在中短期(跨度在120d以内)预报精度较高,随着预报跨度增加,其预报精度略有下降,但总体效果较好。
6 结论
本文利用EOP C04的极移序列建模进行中短期预报,其目的是能够得到未来一段时间内高精度的极移值。对EOP C04序列重采样减少了数据点数目,而频谱分析结果表明数据信息量并未减少,采样间隔为10d的插值基础序列可以作为极移预报的数据来源。对插值基础序列提取趋势项有利于建模预报,利用多输入-单输出的BP神经网络建模对不同跨度预报效果良好。
本文预报方法能够得到较好的中短期极移预报值。然而,本文仅使用极移观测序列的信息来建立模型实施预报,如果能结合地球自转的物理特性,可使预报更加完善。
References)
[1] Chin T M,Gross R S,Dickey JO.Modeling and forecast of the polarmotion excitation functions for short-term polarmotion prediction[J].Journal of Geodesy,2004,78(6):343-353.
[2] Zhu SY.Prediction of polarmotion[J].Bulletin Géodésique,1982,56(3):258-273.
[3] Chao B F.Predictability of the Earth's polar motion[J].Bulletin Géodésique,1985,59(1):81-93.
[4] Kosek W,Mccarthy D D,Johnson T J,et al.Comparison of polar motion prediction results supplied by the IERS subbureau for rapid service and predictions and results of other prediction methods[C]//Proceedings of Journees St.Petersburg:2003.
[5] Kosek W,Kalarus M,Niedzielski T,et al.Forecasting of the Earth orientation parameters-comparison of different algorithms[C].Paris,France,2008.
[6] Egger D.Neuronales netz prädizierterdrotations parameter[J].Allgemeine Vermessungsnachrichten(AVN),1992:517-524.
[7] Egger D,Fröhlich H.Prädiktion von erdrotationsdaten-klassisch und neuronal[J].Allgemeine Vermessungsnachrichten(AVN),1993,10:366-375.
[8] Schuh H,Ulrich M,Egger D,et al.Prediction of Earth orientation parametersby artificial neural networks[J].Journal of Geodesy,2002,76(5):247-258.
[9] Liao D C,Wang Q J,Zhou Y H,et al.Long-term prediction of the Earth orientation parameters by the artificial neural network technique[J].Journal of Geodynamics,2012,62:87-92.
[10] 王琪洁.基于神经网络技术的地球自转变化预报[D].上海:中国科学院研究生院上海天文台,2007.WANG Qijie.Studies on the prediction of Earth's variable rotation by artificialneuralnetworks[D].Shanghai:Shanghai Astronomical Observatory, Chinese Academy of Sciences,2007.(in Chinese)
[11] 张志,廖瑛,文援兰,等.基于基本多项式的GPS精密星历插值方法研究[J].测绘通报,2014(1):12-15.ZHANG Zhi,LIAO Ying,WEN Yuanlan,etal.Research on method of GPS precise ephemeris interpolation based on standard polynomial[J].Bulletin of Surveying and Mapping,2014(1):12-15.(in Chinese)
[12] 高大启.有教师的线性基本函数前向三层神经网络结构研究[J].计算机学报,1998,21(1):80-86.GAO Daqi.On structures of supervised linear basis function feed forward three-layered neural networks[J].Chinese Journal of Computers,1998,21(1):80-86.(in Chinese)
[13] Simon H.神经网络原理[M].2版.叶世伟,史忠植,译.北京:机械工业出版社,2004.Simon H.Neural networks[M].2nd ed.Translated by YE Shiwei,SHIZhongzhi.Beijing:China Machine Press,2004.(in Chinese)
[14] Niedzielski T,Kosek W.Prediction of UT1-UTC,LOD and AAMχ3 by combination of least-squares and multivariate stochastic methods[J].Journal of Geodesy,2008,82(2):83-92.