基于GPS的弹道修正弹驱动控制器系统
2015-02-23张丽艳杜忠华张志安戴炜
张丽艳,杜忠华,张志安,戴炜
(1.南京理工大学机械工程学院,南京210094;2.总装装甲兵装备技术研究所,北京100072)
基于GPS的弹道修正弹驱动控制器系统
张丽艳1,杜忠华1,张志安1,戴炜2
(1.南京理工大学机械工程学院,南京210094;2.总装装甲兵装备技术研究所,北京100072)
针对目前国内二维弹道修正处于起步阶段和一维弹道修正处于研制阶段,提出了一种基于距离及精度二次修正执行机构的驱动控制器,该驱动控制器模块是一种新型的修正组件控制模块,详细介绍了修正组件控制器的工作原理、修正原理和硬件电路设计。硬件电路设计主要包括升压电路、四路起爆电路和异或门电路。每路起爆电路可以独立控制一个阻尼片。该控制器可以完成多种模式的修正,不仅可以完成弹道修正弹的一维一次和一维二次距离修正,还可以完成弹道修正弹的二维修正。
弹道修正弹,升压电路,起爆电路,异或门
0 引言
一维弹道修正弹只能对弹药射程进行修正[1],是弹道修正弹发展的初始阶段,国外技术已相对比较成熟,是目前弹道修正弹的主流。二维弹道修正弹可对弹药的射程和方位进行修正[3],但仍处于研制阶段。针对此现象,国内外提出了很多弹道修正弹修正执行机构的方法。文献[2]设计了一种新型的变面积增阻式修正机构,克服了原有机构中只能进行一次修正的问题。文献[4]提出了一种用于一维弹道修正引信的执行机构。通过软件仿真对机构的受力情况和工作过程进行了数字仿真和系统分析,得到一维时间控制射程修正规律。文献[5]提出了二维弹道修正火箭弹的系统组成和工作原理,并阐述了利用控制发动机改变火箭弹速度方向以实现二维弹道修正的新概念。
弹道修正弹的修正组件控制器是弹道修正系统的重要组成部分,一维弹道修正弹的射程修正和二维弹道修正弹的射程方位修正都需要不同的驱动控制器来完成[6]。鉴于控制器应用的特殊性,必须满足小型化、重量轻、抗过载且成本低等要求。本文提出了一种独立的弹道修正控制器模块,既可以实现一维弹道距离一次修正和距离二次修正,也可以实现弹道的二维修正,此控制器模块集合了一维弹道修正弹和二维弹道修正弹的优点,大大提高了弹道修正的精度。
1 修正组件控制器的修正原理
弹道修正弹执行机构主要由作动器、解锁机构、驱动装置和阻尼片等组成。作动器选择为火药推销器。该执行机构需要4个推销器,每一个起爆电路控制一个推销器,每一个推销器控制一个阻尼片,因此,可以达到阻尼片单独张开、两个同时张开和全部张开的目的。根据阻尼片张开的个数,得到阻尼片依次张开的示意图如图1所示,阻尼片张开顺序是A-E时,实现一维一次距离修正;阻尼片张开顺序是A-C-E时,实现一维二次距离修正;阻尼片张开顺序是A-B-C-D-E时,实现弹道修正弹二维修正。

图1 阻尼片依次张开示意图
1.1弹道修正弹一维修正
弹道修正弹依据“打远修近”的原理[1],根据偏差的大小形成控制指令,由升压起爆电路的四路起爆同时作用,把指令传给弹上4个阻尼片,接收指令后4个阻尼片同时张开,实现弹道修正弹的一次修正。一维一次修正弹道飞行轨迹示意图如图2所示。阻尼片张开顺序为A-E。在弹丸飞行过程中首先两路起爆电路作用,使得两个相对的阻尼片同时张开,进行弹道修正弹道的一次修正,飞行适当时间后,根据实际弹道和理想弹道误差,控制剩余两路起爆电路作用,阻尼片全部张开,实现弹道修正弹的一维二次修正。一维二次修正弹道飞行轨迹示意图如图3所示。阻尼片张开顺序为A-C-E。
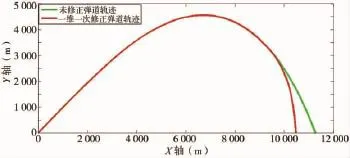
图2 一维一次修正弹道飞行轨迹示意图
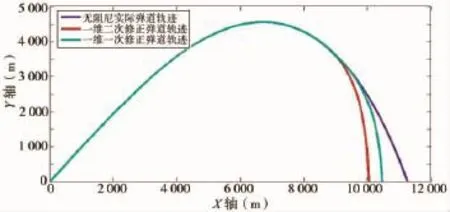
图3 一维二次修正弹道飞行轨迹示意图
1.2弹道修正弹二维修正
弹道修正弹二维修正基本原理是:首先一路起爆电路作用,其中一个阻尼片张开用于纵向修正,阻尼片张开后再次获取弹丸位置信息,适当的时间张开相对的阻尼片进行辅助纵向修正。纵向修正完毕后,根据实际弹道与理想弹道对比,计算出弹道偏差,得到阻尼片张开的时刻,依次张开其他两个阻尼片进行横向修正,假如第2次方向修正还没有达到预期方向轨迹,第3个阻尼片张开继续修正方向,直到修正好为止。二维弹道修正飞行轨迹示意图如图4所示。阻尼片张开顺序为A-B-C-D-E。
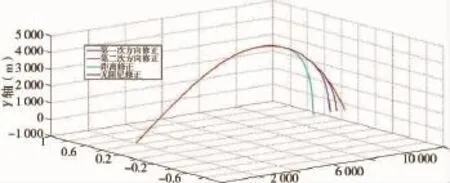
图4 二维弹道修正飞行轨迹示意图
2 修正组件控制器电路设计
2.1修正组件控制器的工作原理
本文设计了以推销器作为原动机的桨型阻尼机构、以GPS作为弹道测量系统和以DSP作为弹载处理器的控制系统。该控制系统修正组件包括控制组件和尾翼组件。控制组件包括:GPS低噪放、GPS接收机、DSP核心控制器、升压起爆控制电路等;尾翼组件包括:推销器、推销机构、尾翼张开机构等。弹道修正弹修正组件工作原理如下页图5所示,GPS天线、低噪放和GPS接收机属于GPS系统,主要用于接收GPS信号,包含弹丸位置信息、速度坐标信息,同时将接收到的GPS信号传递给DSP处理器;DSP处理器系统的主要功能是接收GPS信号,并解算弹道,给出修正机构展开时刻,输出起爆信号给起爆控制电路,起爆电路引爆推销器内部点火具,推销器动作,控制阻尼片张开,完成对弹道飞行轨迹的修正。

图5 弹道修正弹修正组件工作原理
2.2电路总体设计
本电路是基于TMS32F28335芯片的控制电路,核心控制器TMS320F28335与GPS接收机以及上位机之间采用串口RS232总线传输数据。对于数据存储,采用基于I2C总线的FRAM(铁电存储器)作为数据存储载体。FRAM存储速度快,掉电不丢失,存储的最小单位字节,适合本系统的存储需求。3.3 V电压供给GPIO端口,1.9 V电压供给芯片内核。4个异或门通过GPIO端口与芯片连接起来,异或门连接升压模块,升压模块连接两个可控硅起爆电路。电路总体原理设计图如图6所示。
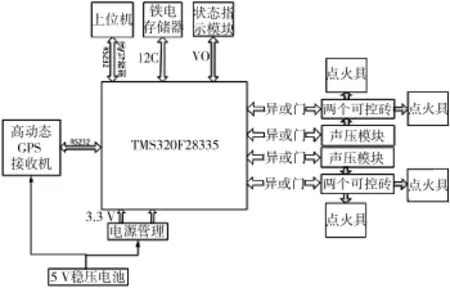
图6 电路总体原理设计图
2.3升压模块
由于点火头的引爆电压大于等于5 V,加上TMS320F28335的IO引脚最大输出电流只有4 mA到8 mA,远远不能引爆点火头。因此,设计此升压模块,将电池电压从3.1 V升压至3.1 V至50 V之间的任意电压值。本模块选用奥地利公司AS1340升压芯片,AS1340工作电压是2.7 V至5.5 V,可提供2.7 V至50 V的可调节输出电压。AS1340的供电系统除为AS1340供电,还可在其电感线圈获得高达50 V的供电电压。从升压控制模式讲,高达1 MHz的固定开关频率使其能使用极小尺寸的电感和电容器件,从而最大限度地减小PCB的空间。升压电路如图7所示。VFB为芯片的基准电压1.25 V,VOut输出电压可以达到3 V~50 V之间的任意值,可以通过式(1)获得:

R7的阻值在10 k-200 k之间。
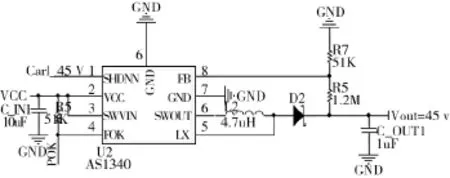
图7 升压电路
2.4引爆电路

图8 四路起爆电路
四路起爆电路设计如图8所示。Ctrl_out为控制信号,Vout_45 V为升压模块提供的45 v电压,Ctrl_fire接点火头一端。当Ctrl_out为高电平时,可控硅导通,引爆点火头,阻尼片张开。根据图8四路起爆电路图可以清楚地看到,四路起爆电路由两个异或门连接,每个异或门连接两路起爆,也就是说当两个异或门同时工作的时候,可以实现四路同时起爆,4个阻尼片也随之同时张开,完成一维弹道修正;2个异或门根据指令依次进行工作的时候,就实现了四路起爆分两次完成,阻尼片也是一对一对的依次张开,可以修正横向和纵向距离。
2.5异或门电路
测试发现,TMS320F28335的每个GPIO引脚都是同步的,因此,将两个GPIO引脚的信号经过异或门芯片异或之后作为升压引爆模块的控制信号。如图9所示。经过示波器测试,异或门芯片有效屏蔽了方波信号对升压起爆模块带来的潜在危险。
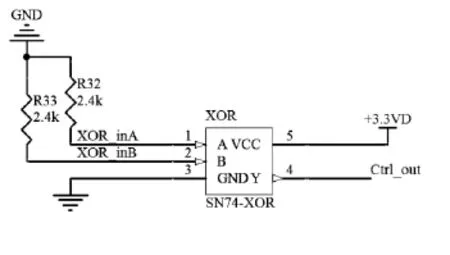
图9 异或门芯片电路设计
3 结论
多功能弹道修正弹执行机构及其驱动控制器在弹丸飞行过程中具有较大的灵活性,适应不同的弹道,从而改变飞行轨迹,直到达到预期的目标。该执行机构由4个推销器和4个阻尼片组成,每个推销器可以独立控制一个阻尼片,互不干涉,实现阻尼片张开的自由性。对弹丸进行射程修正的时候,经过弹道解算结果分析分为两种情况:一是只需要一次射程修正就可以达到修正效果,在适当的时间同时张开4个阻尼片进行距离修正,完成一维一次修正;二是弹丸实际飞行轨迹与理想弹道轨迹误差比较大,需要进行两次射程修正才可以命中目标,即弹丸飞行过程中,首先张开两个阻尼片,进行弹道一次距离修正,在适当的时间再张开其他两个阻尼片,进行第2次弹道修正,最终完成弹道一维二次修正。对弹丸飞行轨迹进行二维修正,首先阻尼片张开进行方向修正,直到在方向上完成预期的效果,然后再进行距离修正。本文设计的多功能弹道修正弹执行机构及其驱动控制器集一维弹道修正和二维弹道修正的优点于一身,提高弹丸的射击精度,这一设计对于弹道修正弹的进一步发展具有一定的促进作用。
[1]张民权,刘东方,王冬梅,等.弹道修正弹发展综述[J].兵工学报,2010,31(2):127-130.
[2]杨芳,郝永平,布国亮.变面积增租式弹道修正机构的设计与分析[J].弹箭与制导学报,2011,31(3):2-4.
[3]史金光,王中原,常思江,等.二维弹道修正弹修正方法[J].海军工程大学学报,2010,22(4):87-92.
[4]Yuan D B,Cui X M,Fan D L,et al.Application of Kalman Filter Method to the Date Processing of GPS of Deformation Monitoring[C]//2010 Second International Workshop on E-ducation Technology and Computer Science(ETCS 2010),2010.
[5]黄义,汪德虎,王建明,等.舰载跟踪雷达测量弹道修正弹坐标转换模型[J].兵工自动化,2012,31(8):1-3.
Study of Trajectory Correction Drive Ccontroller Based on GPS
ZHANG Li-yan1,DU Zhong-hua1,ZHANG Zhi-an1,DAI Wei2
(1.School of Mechanical Engineering,Nanjing University of Science&Technology,Nanjing 210094,China;2.Armored Forced Equipment Technology Institution,Beijing 100072,China)
In order to improve missiles intensity,using resistance correction principle is a low cost trajectory correction technique.In the domestic,two dimensional trajectory corrections are in its infancy and one dimensional correction is in the stage of development.This paper presents a drive controller based on distance and precision about correction actuator.Drive controller module is a new controller module of correction component,introduces the works,correction principle and hardware circuit of the revised component controller.Hardware circuit design including the booster circuit,four detonates circuit and XOR gate circuit.This controller can perform a variety of modes about correction,not only complete one dimensional trajectory first correction and quadratic distance correction,but also can complete two-dimensional trajectory correction.
trajectory correction projectile,boost circuit,detonates circuit,XOR gate
TJ012.4
A
1002-0640(2015)02-0144-04
2014-01-19
2014-02-04
张丽艳(1989-),女,山东莱芜人,硕士。研究方向:控制器系统设计。
