双速制声自导鱼雷射击提前角及变速时机研究*
2015-02-23胡宏灿周明寇祝林宗祥
胡宏灿,周明,寇祝,林宗祥
(海军大连舰艇学院,辽宁大连116018)
双速制声自导鱼雷射击提前角及变速时机研究*
胡宏灿,周明,寇祝,林宗祥
(海军大连舰艇学院,辽宁大连116018)
双速制声自导鱼雷直航搜索阶段速度的变化给射击提前角的计算带来了新的挑战,通过对双速制鱼雷直航搜索阶段速度配置策略的分析,提出了特定战位条件下双速制鱼雷射击有利提前角范围的概念,建立了在选定射击提前角的前提下鱼雷变速时机的计算模型,仿真结果表明此方法思路清晰、步骤简单,结论合理,为双速制声自导鱼雷有利提前角和变速时机计算作了理论探讨,具有一定的实用价值。
双速制鱼雷,变速时机,有利提前角
0 引言
轻型智能声自导鱼雷是针对浅水近岸复杂水文环境研制开发的新型反潜武器,攻潜过程速度可变是此类鱼雷的一大技术特征。鱼雷速制的变化,可有效提高鱼雷航程、增加鱼雷攻潜隐蔽性,为鱼雷的作战使用提供了更加灵活的方式。同时,攻潜过程中鱼雷速度的变化将直接影响鱼雷总航程、自导作用距离等关键技术战术参数,针对单速制鱼雷建立的发射诸元解算模型已不再适用变速制鱼雷,分析鱼雷变速时机和提前角的关系、建立鱼雷发射提前角和鱼雷变速时机计算模型是双速制鱼雷作战使用的基础性问题,也是国产新式鱼雷亟需研究的战术热点问题。
1 双速制声自导鱼雷射击提前角分析
1.1 鱼雷发射有利提前角原理及双速制鱼雷基本变速策略
根据鱼雷反潜基础理论,在特定阵位态势,射击条件确定的情况下能够使鱼雷最大程度地遮盖目标散布的鱼雷发射角度,称为鱼雷发射有利提前角[1-2]。有利提前角的计算是鱼雷反潜最重要的战术任务之一,双速制鱼雷发射仍然要遵循这一指导性理论。
鱼雷配置多速制功能的使用原则就是低速搜索捕获目标、高速追踪摧毁目标,多速制鱼雷在远距离实施反潜攻击时,低速搜索可减小鱼雷自身辐射噪声、敌潜艇鱼雷报警距离,同时增加鱼雷自导作用距离和航程,提高鱼雷攻击的隐蔽性,有利于对目标的捕获,故直航搜索段的前期,通常使用低速航行;在雷目距离达到某个阈值时,或鱼雷捕获到目标时,转为高速航行,以保证对目标的快速锁定和跟踪,以上即为多速制鱼雷速度配置基本策略[3-4],攻潜阵位态势如图1所示。当鱼雷速度变化时,直航搜索阶段鱼雷平均速度将随着变速时机的不同而不同,针对单速制鱼雷建立的有利提前角计算模型将不再适用。
1.2 双速制鱼雷射击有利提前角特点分析
以美国某型双速制鱼雷为例,低速航行速度为36 kn,高速为45 kn,假设当直航段鱼雷全程低速36 kn航行时,对应的有利提前角为φa1,直航段鱼雷全程高速45 kn航行时,对应的有利提前角为φa2,如果直航段使用了变速策略,那么无论何时变速,有利提前角将落在φa1~φa2之间,如图2所示。即双速制鱼雷直航搜索阶段使用变速策略时,提前角将不再是个定值,而是一个角度范围,在此角度范围区间内,每一个提前角与直航段的特定鱼雷平均速度相对应,而每一个平均速度与一个鱼雷变速时机相对应。综上可知,在一定的战位态势下,双速制鱼雷有利提前角范围可使用单速制鱼雷有利提前角解析计算方法求出,根据此时舰艇运动参数,在此范围内选择适当的有利提前角后,问题将转化为双速制鱼雷直航搜索段变速时机计算问题。
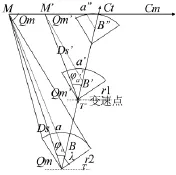
图1 双速制鱼雷攻潜态势图
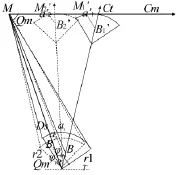
图2 双速制鱼雷提前角范围示意图
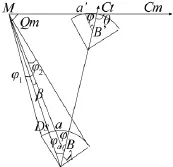
图3 单速制鱼雷提前角计算阵位图
2 双速制声自导鱼雷有利提前角及变速时机计算模型
2.1 双速制鱼雷有利提前角范围计算模型
由以上分析可知,特定阵位条件下提前角将是个角度范围,而全程高速和全程低速分别对应这个角度范围的两个极值。假设双速制鱼雷低速为Vd,鱼雷低速自导作用距离为r1,鱼雷高速为Vg,鱼雷高速自导作用距离r2,鱼雷自导扇面半角为λ,实施反潜攻击时,敌潜艇航速为Vm,射距为D,敌舷角为Qm,以鱼雷目标相对移动线平分极限角为条件,由图3单速制声自导鱼雷反潜阵位态势图几何关系可建立鱼雷有利提前角计算模型:
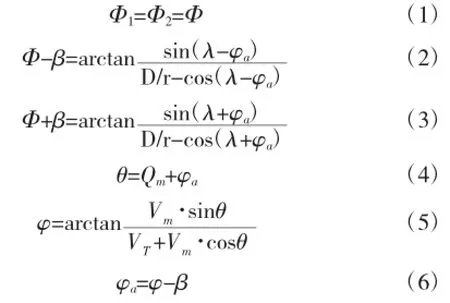
式中Ф1,Ф2:鱼雷和目标相对移动线平分鱼雷自导扇面极限角的角度值;β:雷目连线和鱼雷扇面中心目标连线之间的夹角;θ:鱼雷航向与目标航向之间的夹角;
分别使用鱼雷高速和低速技术战术指标参数带入式(1)~式(6),使用解析迭代法可分别求出全程高速和全程低速分别对应的提前角φa1、φa2[1]。
2.2 提前角选定条件下的变速时机计算模型
以目标潜艇当前位置为原点,潜艇航向为X轴,建立笛卡尔坐标系,如图1所示,则潜艇和鱼雷的实时位置可表示为:
潜艇实时位置:
Xm为潜艇横坐标;Ym为潜艇纵坐标;
假设鱼雷发射提前角选定为φa∈[φa1,φa2],鱼雷实时位置:

XT为鱼雷横坐标;YT为鱼雷纵坐标;
在提前角为φa时,设对应的变速时刻为t1,则t1时刻的鱼雷位置T’:

t1时刻的目标位置M’:

t1时刻雷目相距距离:

t1时刻敌舷角为:

也即在变速点t1时刻,鱼雷、目标形成了一个新的战位态势图,以鱼雷高速技战术数指标带入式(1)~式(6),可求得此态势下的提前角φ'a,而为了保证变速前后鱼雷航向不变,由图1可知,必须满足以下关系式:

式(13)即为在鱼雷提前角为φa时变速时机计算的约束条件。
2.3 模型迭代求解步骤
使用迭代法求解以上方程组,仿真计算时提前角φa在区间[φa1,φa2]内变化,仿真步长设为0.2°;在每一个提前角下,变速时刻t从0开始变化,仿真步长设为10 s,解出的值,直到此值小于一个阈值为止,则此时对应的t1就为当前提前角下鱼雷应该低速航行时间,也即在特定提前角φa下鱼雷变速时机。解算流程图如图4所示。

图4 特定提前角下鱼雷变速时机计算仿真流程图
3 仿真数据分析
3.1 计算结果
以美国某型双速制鱼雷为例,在射距DS=10000m,敌舷角Qm=45°,鱼雷低速Vd=36 kn,鱼雷低速自导作用距离r1=2 000 m,鱼雷高速Vg=45 kn,鱼雷高速自导作用距离r2=1 500 m,鱼雷自导扇面半角λ=45°,敌航速Vm=12 kn的情况下仿真计算结果如表1所示。

表1 仿真结果
3.2 数据分析
在以上战位态势和鱼雷技术参数条件下,可选择的鱼雷发射角度范围为9.7°~11.7°,仿真时提前角以0.2°步进,使用迭代的方法,时间步长设置为10 s,可计算出每个提前角下鱼雷低速航行时间,也即变速时机。仿真数据验证了变速时机随提前角的增大而延后这一先验规律,但是变速时机并不随提前角成线性变化关系。
3.3 提前角选择一般规律
在鱼雷技战术指标一定、阵位态势确定的情况下,鱼雷发射提前角的选择涉及到鱼雷变速具体策略,这是另一鱼雷战术热点问题,需要考虑潜艇水声对抗、机动原则和鱼雷再搜索弹道等具体问题,这里仅分析一下提前角选择的一般规律。根据反潜理论,当使用较小提前角发射时(意味着鱼雷变速时机早),接敌速度快,目标散布区域小,鱼雷自导扇面遮盖目标散布区域大,捕获概率相对较高,也即变速时机提前,可以提高鱼雷的捕获概率;但是考虑到目前潜艇都有完善的水声对抗措施,潜艇在发现有来袭鱼雷时,会作出相应的对抗。这样一来,在雷目预定相遇点捕获到目标的概率会降低,在这种情况下为了提高命中概率,鱼雷需要留有较大的剩余航程才能实施再搜索弹道、反对水声抗措施。综上分析可知,提前角的选择在考虑雷目预定相遇点捕获概率的同时,还要兼顾剩余航程的保留,这一战术博弈问题还需要进一步深入研究。
4 结束语
本文从双速制鱼雷攻潜特点分析入手,论证了提前角和变速时机的关系,提出了多速制鱼雷有利提前角范围的概念,这一概念的提出增加了水面舰艇攻潜战术使用的灵活性;建立了双速制鱼雷提前角和变速时刻计算模型,在特定战场态势下进行了仿真计算,结果表明此方法概念清晰,计算简单,结论合理可信,为双速制声自导鱼雷有利提前角和变速时刻的计算做了有益的探讨。文中提到的方法和思路对多速制鱼雷提前角及变速时机计算问题也有一定的借鉴作用。
[1]孟庆玉,张静远.鱼雷作战效能分析[M].第1版.北京:国防工业出版社,2005.
[2]贾跃,李铁,李文哲.反潜理论基础[M].第1版.大连:海军大连舰艇学院,2007.
[3]赵正业.潜艇鱼雷攻击[M].北京:海军司令部,1993.
[4]吴和声,徐杏钦.高科技背景下的鱼雷武器[J].鱼雷技术,2003,11(3):12-18.
Study of Firing Advance Angle and Speed Changing Moment for Daul-speed Accoustic Homing Torpeto
HU Hong-can,ZHOU Ming,KOU Zhu,LIN Zong-xiang
(Dalian Naval Academy,Dalian 116018,China)
In this paper,the antisubmarine characteristic of daul-speed accoustic homing torpedo in target searching sectionis analysed firstly,a conception of advance angle range is presented according to speed changing in straight-running segment,then the caculation model of speed changing moment is structured based on the course stay the same befor and after the torpedo speed changing,Finally the mathematical model is emulated using the iterative method and the result show that the model is reasonalble and convenient.
daul-speed torpeto,opportune moment of speed changing,advance angle
TJ630;E843
A
1002-0640(2015)02-0115-03
2013-12-05
2014-01-24
全军研究生课题基金资助项目(2010JY0719-416)
胡宏灿(1975-),男,山东人,在读博士。研究方向:鱼雷反潜和嵌入式技术。
