前置式大蒜收获机的研发
2015-02-15河北省农业机械化研究所有限公司高清海陈思刚
河北省农业机械化研究所有限公司 高清海 陈思刚
1 引言
随着农业产业结构的调整,大蒜作为一种重要的经济作物已经越来越受到人们的关注。目前大多数地区都采用传统的人工收获方式,借助自制的简易扁铲人工挖掘,生产效率比较低。为此,对市场上现有的分段式大蒜收获机械进行试验、研究,并结合一些理论和实践,对其进行了结构改进。采用拥有量大的小四轮拖拉机为动力,特别是在该机限深轮上采用限深轮转臂通过拉线与拖拉机转向臂联接,实现了收获大蒜时拖拉机前轮与限深轮同步转向,有效地解决了前置式收获机作业时不易操作的问题。
1.1 研究背景
大蒜营养丰富,风味独特,用途广泛,具有杀菌、抑菌、抗毒等医疗和保健功能,对高血脂、高胆固醇、糖尿病、心脏病及胃、肠、肝、肺、乳腺等癌症有减轻症状及治疗作用。大蒜是我国主要经济作物之一,我国是世界上重要的大蒜生产国与出口国,每年大蒜种植总面积在70万hm2以上,近年来随着农业种植结构的调整,我国大蒜的种植面积不断加大,每年约以3%~5%的速度递增。然而,由于大蒜是根茎类作物,收获时的作业条件变化较大,如土壤坚实度和含水率等具有较大差异,而且被收获的蒜头鲜嫩,怕碰伤和太阳曝晒,所以说大蒜机械化收获要求高、难度大。另外,还受到收获季节的限制,过早收获或者过晚收获都会影响到大蒜的品质和价格,最佳收获时间应该在7天内。根据大蒜收获的农艺要求,对机械化收获大蒜提出了更高的作业要求。大蒜收获机适应能力强,可在不同土壤、不同含水率的条件下作业,可靠性好,作业效率高。提高机械化收获的作业经济性:可一次完成挖掘、蒜土分离及大蒜铺放覆盖作业工序,避免或减少大蒜损伤和太阳曝晒,提高大蒜的收获质量。
1.2 国内外研究现状
国外研制开发的大蒜收获机由于价格昂贵和经济性差且其生产模式、作业环境与我国存在差异,难以适应我国生产的实际需求。近年来,随着国家对“三农”问题的重视和我国农业机械化的发展,我国的大蒜机械化收获技术有了长足的进步,但因各地农艺不同、行距及株距的差异,存在着适应性差、质量不可靠等问题,都没有批量生产和大面积推广应用。因此,结合我国大蒜种植区小四轮拖拉机保有量大的现状,考虑大蒜种植区主要种植模式,河北省农业机械化研究所有限公司研制开发了前置式大蒜收获机。该机具与小四轮拖拉机配套使用,可一次完成挖掘、蒜土分离及铺放覆盖等作业,可满足大蒜收获的农艺要求,减轻了农民负担。
1.3 研究目的和意义
考虑到广大蒜农的的迫切需求和农业机械化的发展,结合小四轮拖拉机保有量较大这一特点,充分发挥小四轮拖拉机在农业机械化中的作用,提高机械配套率和劳动生产率,考虑设计新型大蒜收获机,进一步提高劳动生产率。
2 方案设计
2.1 大蒜收获农艺要求
(2)刚收获的大蒜怕晒,一般铺放时要保持条状,蒜叶应将蒜头遮盖住。
(3)大蒜收获期质地较嫩,易损伤,蒜头易散,蒜瓣易散落,收获时机械不要碰撞大蒜,避免车轮辗压,否则会使大蒜失去商品价值。
(4)机具作业质量指标为:蒜率>95%,损伤率<2%,收获的大蒜中应尽量减少泥土和含杂量。
2.2 机械收获大蒜方式的选择
大蒜收获方式有联合收获和分段收获两种模式:
一次完成挖掘、分土、切茎和切须等作业的收获过程,称为联合收获;分段式收获是指对大蒜进行挖掘、分土、归拢等作业的机械收获方式,后期拾取、切茎等工作仍需人工完成。联合收获只是在特定的实验条件下获得实验效果,不仅作业成本高,而且大蒜损伤率也高,受我国大蒜种植模式的影响,在实际生产中很难得到应用与推广。分段式大蒜收获机械结构简单、成本低廉、操作简便,可大大减少用工,提高收获效率,是目前大蒜收获的较好方案,也符合现阶段国情。因此该设计采用机械挖掘、分离和条放的收获方式。
2.3 配套动力选择及总体布置
在配套动力及连接方式上选用14.7kw小四轮拖拉机,为防止和减少拖拉机轮胎在现行种植模式下压蒜、伤蒜问题,采用机具前置式的整体结构。
2.4 挖掘铲型式的确定
为了减小作业阻力,该机采用振动式挖掘铲。
结核结节粟粒大小呈灰白透明或黄白色圆形病灶。有钙盐沉着,周围形成纤维性包膜、切面灰白色,有干酪样坏死物质,刀割有砂子硬感。结核结节与早期淋巴肉瘤的网状组织细胞内瘤相似。镜检:病灶为坏死组织周围有大量上皮样细胞、淋巴细胞或纤维细胞。肝淋巴瘤是呈黄白色髓样的恶性肿瘤。常发育成巨大结节,并转移到肝门淋巴结。还可突入后腔静脉内,除在静脉内形成结节外,其它脏器内也有转移性结节。用刀割无硬感。镜检见淋巴结结构消失,为幼稚的淋巴细胞及成淋巴细胞所代替,瘤细弥散、有间变、核分裂相多见。
2.5 限深轮转向设计
为了提高机具的操控性,设计了限深轮转向机构。在该机限深轮上采用限深轮转臂通过拉线与拖拉机转向臂联接,实现了收获大蒜时拖拉机前轮与限深轮同步转向,有效地解决了前置式收获机作业时不易操作的问题。
2.6 整机设计
该大蒜收获机主要由限深轮、挖掘铲、链杆式输送分离部件组成,通过连接架整体安装在小四轮拖拉机的前保险杠上,利用液压提升机构进行升降控制。振动挖掘铲将畦内收获幅宽内大蒜与土一起震动挖掘,通过输送链杆和前宽后窄的收拢板实现土蒜分离,并将大蒜收拢于拖拉机轮距内。挖掘铲前端安装有与拖拉机前轮同步转向的限深轮,确保挖掘深度并便于操作。
3 技术参数选择
技术参数主要包括作业幅宽、作业深度、明蒜率和损伤率。作业幅宽和作业深度是由大蒜在田间生长状态和主机功率决定的,明蒜率由分离链来保证。
3.1 作业深度和作业幅宽
为了能挖出全部大蒜,减少伤蒜,挖掘深度比蒜头生长深度(95mm)深30~40mm。该机挖掘深度设计在150mm内(可调),由限深轮来实现。为避免在作业过程中轮胎对蒜头的碾压,作业幅宽应略宽于拖拉机外轮距(1240mm),取作业幅宽为1300mm。
3.2 明蒜率
大蒜仅蒜头埋在土壤中,只要分离链条长度合理即可实现较好的分离效果,明蒜率初步定为>95%。
3.3 损伤率
大蒜损伤分为外部碰伤、内部压伤和蒜头散开,都会影响大蒜的商品价值,农民可以接受的损伤率为3%左右,该机定为<2%。
4 整机工作原理及主要结构设计优化
4.1 工作原理
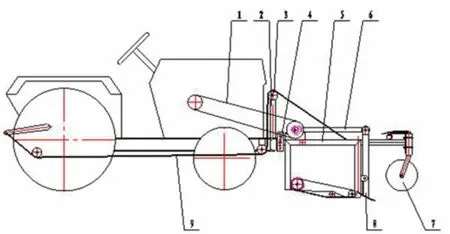
图1 整机示意图

图2 俯视图
该机具与14.7kw四轮拖拉机配套使用。其工作原理如下:收获机进入田间作业时,降下液压升降机构,机体靠自重整体绕悬挂轴旋转,三角带被张紧把动力传至给动力输入轴,使挖掘铲和链杆输送链运动;拖拉机前进时,挖掘铲入土至限深轮限定深度,振动挖掘铲将畦内收获幅宽内大蒜与土一起震动挖掘,靠拖拉机前进形成的推动力将蒜、土一起推送到链杆输送链上,通过链杆输送链和前宽后窄的收拢板实现土蒜分离,并将大蒜收拢于拖拉机轮距内。大蒜顺着拖拉机机体前进方向呈带状摆放,经人工捡拾和修剪处理后,及时晾晒入库或直接到市场销售。
4.2 机构特点
(1)机具通过悬挂轴与连接架铰接,在连接架上方安装有升降绳轮,钢绳前端固定在收获机架上绕过升降绳轮与拖拉机升降臂联接,操作拖拉机液压升降机构即可控制机具升降作业。
(2)在收获机前方装有限深轮,限深轮转臂与限深轮立轴上部固定联接,转臂一端通过拉线与拖拉机转向臂联接,另一端通过拉簧与收获机架联接转向机构。机手只需转动方向盘即可改变机体的工作方向,解决了前置式大蒜收获机作业中方向不易控制的难题。
4.3 主要部件的设计优化
(1)振动挖掘铲。振动挖掘可大大减少前进阻力,因此,该机挖掘部件设计为振动式挖掘铲,工作时由曲柄连杆机构带动挖掘铲产生振动。
①挖掘铲形状和参数。由于挖掘铲为振动式,工作时受到很大冲击力,另外,它后面紧靠升运链,而升运链自身没有切土、碎土功能,其前面土壤必须全部疏松。因此,挖掘铲选取整体式平面单铲,两端由振动臂固定。为了保证铲刃的自动清理和良好的入土性能,铲形设计为带斜刃的三角形铲。
三角平面铲的主要参数有铲刃斜角γ、铲的倾角α 和铲的宽度Β。铲刃斜角γ,为了保证铲刃自动清理,铲刃要有一定的斜角,因铲为整体式,受尺寸限制,斜角不能太小,否则铲的长度会较大,加大前进阻力。经试验,2γ 选取160°,这个角度有利于平作。
铲的倾角α 应小于24°,越小,铲的阻力越小,选取α=15°。
铲宽度Β 取1300mm。
②挖掘铲振动幅度和频率。
振动频率n。根据前苏联农业机械制造研究所的资料,挖掘铲每分钟摆动次数应为507 ③振幅f。 振动铲刃的运动轨迹为锯齿形,为了不使锯齿高度增大,取f=24mm。 (2)分离输送链。分离输送链是块根类作物收获机上广泛应用的分离部件,它有较强的分离能力,并在倾角达30°时仍有良好的输送能力,且结构简单。主要参数有线速度、倾角、长度、宽度和节距等。 线速度。在土壤处于干硬状态时,如果输送链线速度大于2m/s,那么分离能力就开始下降;当土壤处于塑性状态时,在输送链线速度增加到4m/s以前,其分离能力有所提高;试验表明,分离输送链最佳线速度为1.5~2.0m/s。大蒜土壤一般为沙壤土,土壤含水率一般为20%~30%,因此,链杆分离筛速度定为1.5m/s。 倾角。机具工作时,输送链的倾角一般为22°~34°。收大蒜时,大蒜叶和蒜头是连在一起的,并含有大量杂草和黄叶,蒜叶量较大,容易向后输送,因此,倾角选中上值,取30°,经试验表明,输送分离效果较好。 长度。分离输送链在含水量适宜的沙土地中分离效果较好,在粘土地中分离效果较差,因此需要达到一定长度,结合整机结构,取0.9m。 宽度。根据挖掘铲宽度尺寸,既要保证输送链运转阻力小,又不致漏收,链杆输送链宽度取挖掘铲宽度减160mm,为1140mm。 链条节距及杆条选择。因大蒜收获为整株带杆收获,蒜头不易落下,为了使输送过程中有良好的漏土性能,输送链选用31.75mm双节距输送链,杆条选用直径为1/2英寸的钢管。 (3)传动系统。传动部分的功能主要是实现振动铲振动和输送链转动,传动路线为: 该样机设计制作完成以后,进行了不断地改进和完善,并进行了大面积的性能生产试验和测试。田间性能生产试验和测试是在大名县红庙乡闫庙村进行的,大蒜品种为苔蒜。大蒜的生长情况如下:植株平均高度为800mm,行距为180mm,株距为190mm,蒜头的深度为40~50mm,直径为60~80mm,土壤类型为沙壤土,湿度≤30%,配置动力为14.7kw。试验结果为:生产率大于0.2hm2/h,收净率为98%,伤蒜率小于2%。该机作业时只需驾驶员一人操作,效率是人工收获的60倍以上,大大降低了生产成本,节省了劳动力。 本文设计的大蒜收获机与14.7kw以上四轮拖拉机配套使用,主要传动和驱动部件经过强度校核,均满足使用要求。本机具具有整机结构先进、设计合理、收净率高和伤蒜率低等特点。可一次完成大蒜的挖掘分离和铺条等作业,具有操作安全方便,作业适应性强,使用可靠性、经济性较好等特点,能满足不同作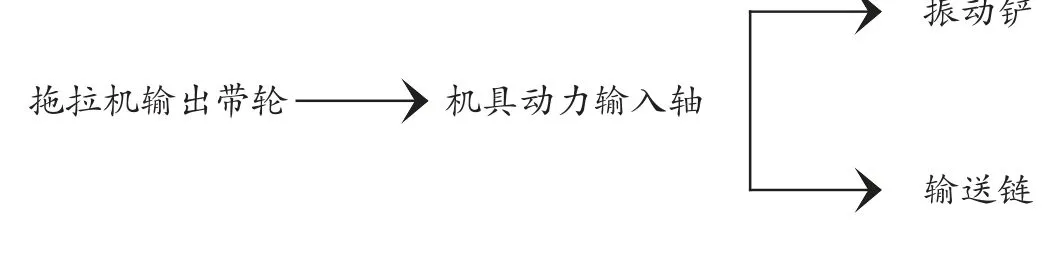
5 田间性能试验
6 结论
