弹道修正弹的指数趋近律姿态控制*
2015-02-13黎海青栗金平黄旭磊
黎海青,栗金平,黄旭磊,杨 凯,王 冬
(中国兵器工业第203研究所,西安710065)
二维弹道修正弹是在普通炮弹的基础上,加装修正组件,使常规弹药获得精确打击能力,从而提高毁伤效率、减小附带毁伤并且极大降低作战成本[1].弹道修正的主要原理是在飞行过程中测量弹丸位置、速度等信息,再利用执行机构改变弹丸弹道,提高命中精度.目前,基于固定翼的弹道修正技术成为研究热点.该方法结构简单,修正原理简明,并能够进行连续修正,其中滚转姿态控制是实现弹道修正的关键.关于修正组件滚转姿态控制的研究较少,文献[2-4]对固定翼二维修正弹进行了初步建模,并对飞行稳定性进行了仿真分析;文献[5]建立了二维修正引信滚转通道控制模型,并设计了双闭环控制算法;文献[6]设计了二维修正引信滚转自动驾驶仪,并通过仿真证明双旋修正引信滚转姿态可控.
文中针对弹道修正弹滚转姿态控制问题,研究了一种基于指数趋近律的变结构控制方法.基于固定翼/可动翼组合的双旋弹修正原理,通过受力分析建立其滚转通道状态空间模型,采用指数趋近律滑模理论设计滚转姿态控制律,通过数学仿真验证该控制律效果.
1 修正组件工作原理
文中以一类固定翼/可动翼组合修正弹为对象,进行滚转姿态控制方法研究.该修正弹由修正组件和弹体两部分组成,其中修正组件可以相对炮弹弹体自由滚转.修正组件表面安装两对翼,一对同向固定翼用于提供修正升力,一对可动翼用于控制组件滚转姿态.弹体相对惯性系高速旋转,保持弹体稳定,修正执行机构布局如图1所示.
图1 修正执行机构布局Fig.1 Schematic diagram of layout of correction actuator
二维修正弹利用系统原有的飞行稳定性简化控制系统设计,采用“单通道控制、二维修正”的工作原理,即通过控制升力翼面的滚转姿态来提供特定方向的修正力,修正弹道轨迹,使弹丸飞向目标位置.建立修正组件坐标系Mxpypzp,坐标系原点为炮弹质心M,oyp与同向固定翼同轴,ozp与可动翼同轴,oyp与准弹体系y轴夹角为γ.根据修正需要,控制升力翼面滚转姿态角γ与期望滚转姿态一致,提供该方向修正力Fc,修正原理如图2所示.
图2 修正原理示意图Fig.2 Schematic diagram of correction principle
2 修正组件控制模型
以带同向翼、差动翼的修正组件为研究对象,建立系统滚转通道控制模型.考虑修正组件滚转运动方程[7]表达式为
式中:Jx为组件转动惯量;Mzn为组件滚转阻尼力矩;Mv,Mc分别为摩擦力矩和控制力矩;mωxx为滚转阻尼力矩系数;cv为黏性阻尼系数;mδxx为差动翼效率;q为动压;s为差动翼投影面积;l为特征长度;δ为可动翼偏转角;ωd为弹体转速,可将cvωd项当作干扰项,具体参数计算见文献[7].
在此,研究对象为二阶系统.由式(1)可得修正弹滚转通道的状态空间模型为

3 滑模变结构的姿态控制律设计
3.1 基于指数趋近律的变结构控制
变结构控制系统动态响应由两部分组成,对应两种性质的运动.第一阶段为切换面外运动,即趋近模态;第二阶段为切换面上的运动,即滑动模态[8].合理设计两个阶段运动可以保证较好的控制品质.
系统状态方程为

式中:x为系统输入变量;A,B为状态方程系数矩阵;u为反馈量.
将变结构控制理论用于控制律设计,首先确定滑模面s来保证趋近运动有较好的动态特性,表达式为

其中C为状态方程系数矩阵.
构造指数趋近律表达式为

式中:-ks 为指数 趋 近 项,其值 为s(0)e-kt;-εsgn(s)为等速趋近项;k,ε为控制参数.指数趋近项反映运动点从远到近趋近滑模面的速度成相应指数规律.在趋近过程中,趋近速度从一较大值逐步减小到零,缩短了运动时间,使运动点到达切换面时速度很小.等速趋近项系数反映运动点趋近滑模面的恒定运动速度,到达切换面时增加等速趋近项,使趋近速度不为零[9].在指数趋近律中,为保证快速趋近的同时削弱抖振,应增大k同时减小ε.
选取滑模面s=Cx,选取指数趋近律构造s·=-εsgn(s)-ks,必定有ss·<0,由李亚普诺夫稳定性理论易知,系统必定向滑模面运动.
3.2 基于变结构控制的滚转姿态控制律设计
文中主要研究弹道修正过程中的修正组件滚转姿态控制问题,在此给出了基于趋近律的滑模控制律设计方法.考虑被控对象为
式中:γc为滚转姿态控制指令;c为系数;e为跟踪误差.
4 仿真及分析
文中弹道修正弹在飞行过程中有空间稳定和匀速转动两个状态.当需要进行弹道修正时,修正组件跟踪并稳定在期望的滚转姿态,可看成跟踪阶跃信号;当不需要进行弹道修正时,修正组件以定转速匀速转动,可看成跟踪斜坡信号.为验证控制律在不同状态下的控制效果,设计了两组滚转姿态指令.t为时间,t1、t2均为阶跃时刻.
1)阶跃信号
其中ωs为组件滚转角速度,设为720°·s-1.
等效动压可以反映整个飞行过程中高度、速度变化,故设计控制律时考虑最大动压和最小动压条件.经仿真计算可知在最大动压和最小动压处弹体滚转特性差别较大,见表1.在设计滚转姿态控制参数时,选取较大趋近参数和较小的等速趋近参数,以获得快速、精确的控制效果.选取控制参数c=10,ε=0.3,k=8.

表1 修正组件弹体特性参数Tab.1 Projectile parameters of correction component
利用Simulink软件建立滚转通道仿真模型,取最大动压和最小动压两个条件分别进行仿真,仿真结果如图3~6所示.

图3 大动压条件下阶跃指令响应Fig.3 Step command response in large hydrodynamic condition
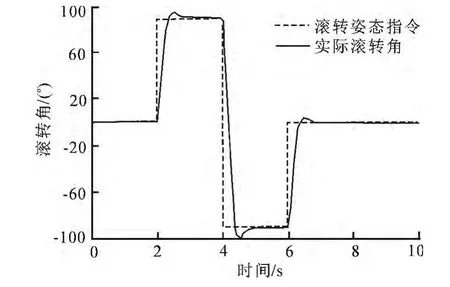
图4 小动压条件下阶跃指令响应Fig.4 Step command response in small hydrodynamic condition
由图3~4可知,大、小动压条件下跟踪±90°阶跃指令,系统调整时间均小于0.5s,表明修正组件滚转姿态能快速转动到期望的角度.由图5~6可知,大、小动压条件下修正组件能够稳定跟踪斜坡指令,即可实现修正组件匀速转动.由以上仿真结果可知,该滚转姿态控制律能适应动压较大范围变化,实现修正组件滚转姿态快速跟踪.

图5 大动压条件下斜坡指令响应Fig.5 Ramp command response in large hydrodynamic condition
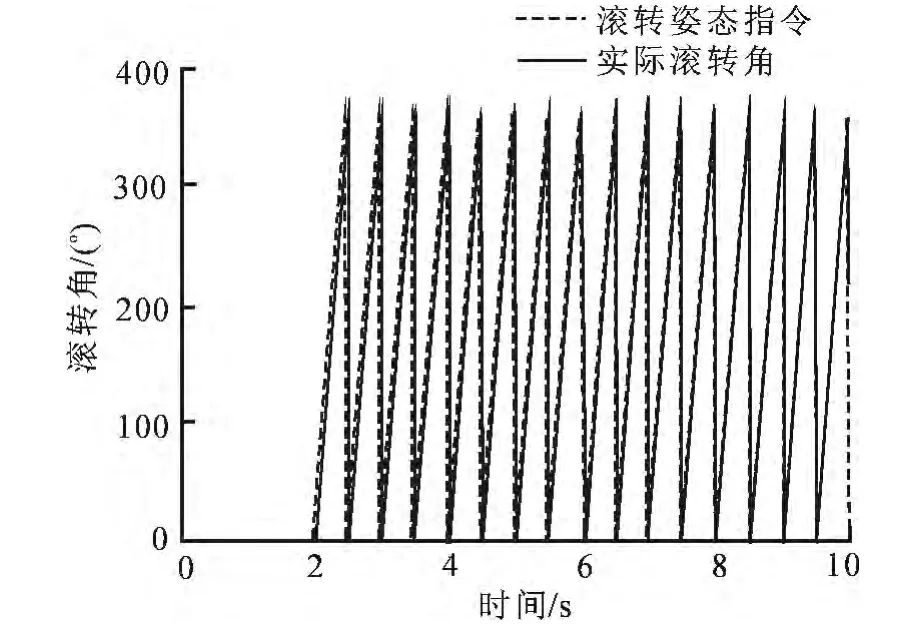
图6 小动压条件下斜坡指令响应Fig.6 Ramp command response in small hydrodynamic condition
5 结 论
1)为了实现固定翼/可动翼组合的弹道修正弹滚转姿态控制,建立了修正组件滚转通道控制模型,采用指数趋近律变结构控制理论,设计了滚转姿态控制器.
2)在大、小动压条件下,该控制器可实现修正组件滚转姿态快速跟踪,阶跃指令调整时间均小于0.5s,表明该控制器可适应动压大范围变化.
[1] 孙新.弹道修正弹鸭舵修正方法研究[D].南京:南京理工大学,2005.SUN Xin.Study on the Correction Method of the Trajectory Correction Projectile[D].Nanjing:Nanjing University of Science & Technology,2005.(in Chinese)
[2] 揭涛,施坤林.旋转稳定弹弹道修正引信减旋装置研究[J].探测与控制学报,2007,29(5):9.JIE Tao,SHI Kun-lin.Study on Despining Device of Course Correction Fuze for Spin-Stabilized Projectile[J].Journal of Detection & Control,2007,29(5):9.(in Chinese)
[3] 常思江,王中原,刘铁铮.鸭式布局双旋弹飞行动力学建模与仿真[J].弹道学报,2014,26(3):1.CHANG Si-jiang,WANG Zhong-yuan,LIU Tie-zheng.Modeling and Simulation of Flight Dynamics for Dualspin Stabilized Projectile Equipped with Canards[J].Journal of Ballistics,2014,26(3):1.(in Chinese)
[4] WERNERT P.Stability Analysis for Canard Guided Dualspin Stabilized Projectiles[C]//AIAA Atmospheric Flight Mechanics Conference.Chicago:AIAA Atmospheric Flight Mechanics Conference,2009:10.
[5] 高铭泽,施坤林,霍鹏飞,等.引信滚转角双闭环控制算法[J].探测与控制学报,2013,35(3):17.GAO Ming-ze,SHI Kun-lin,HUO Peng-fei,et al.Double Closed Loop Control Algorithm of Fuze Roll Angle[J].Journal of Detection & Control,2013,35(3):17.(in Chinese)
[6] VILJOEN G,PLESSIS R D.Desgin and Roll Attitude Control of a 2DGuided Fuze Kit[C]//26th International Symposium on Ballistics.Miami:Journal of Applied Mechanics,2011:12.
[7] 钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2000.QIAN Xing-fang,LIN Rui-xiong,ZHAO Ya-nan.Missile Flight Aerodynamics[M].Beijing:Beijing Institute of Technology Press,2000.(in Chinese)
[8] 高为炳.变结构控制的理论及设计方法[M].北京:科学出版社,1996.GAO Wei-bing.Theory and Design Method of Variable Structure Control[M].Beijing:Science Press,1996.(in Chinese)
[9] 刘金琨.滑模变结构控制 Matlab仿真[M].北京:清华大学出版社,2012.LIU Jin-kun.Sliding Mode Variable Structure Control Matlab Simulation[M].Beijing:Tsinghua University Press,2012.(in Chinese)
