圆柱零件加工用直线电机模糊自适应PID控制及建模*
2015-02-13孟祥众
国 蓉,刘 磊,孟祥众
(西安工业大学 光电工程学院,西安710021)
传统的数控机床采用的滚珠丝杆与伺服电机配合的方式,随着对加工精度与效率的需求不断提高,传统的配合方式所具有的效率低、速度慢、加工精度差等缺点很难达到人们的需求.直线电机能够替代丝杆与伺服电机环节,有效的降低了传动环节所造成的误差,显著提升了系统的效率、进给速度等[1].为了提高加工设备的精度与速度,许多企业开始使用直线电机做为加工平台的执行机构.当直线电机生产成型后,特性也就确定了,直线电机与执行机构是直接连接,二者间不存在缓冲机构,负载出现变化时便会直接作用在直线电机上,给整体系统的控制带来较大的影响.如果要提高加工过程的定位精度与速度响应等性能,就需要对控制系统进行深入的研究.文献[2]在传统比例积分微分调节(Proportion Integration Differentiation,PID)控制基础上提出的一种改进型的模糊技术,该技术可以改善传统的PID控制品质,增强系统灵活性和适应性,有效提高永磁同步电机交流调速系统性能;文献[3]通过研究模糊控制、PID控制以及直线电机,并将三者有机的结合在一起,使整体控制系统一方面具有便于控制与适应能力强的优势,另一方面也保持了PID控制所具有的高精度的特点,以此达到提高整体伺服系统可靠性的目的;文献[4]将模糊控制与PID控制进行结合,完成了控制器的建立并应用在直线电机速度环,同时,为了提高系统可靠性,对模糊算法进行了改进,从而达到提高整体控制系统动、静态特性的目的,电机在运行过程中速度的响应与定位的精度也得到了较大的提升;文献[5]通过在位置调节器中使用模糊增量PID控制的方法来达到控制调节器在运行时能够完成自适应与自整定控制;文献[6]介绍了一种最优模糊PID控制器,模糊PID控制器是常规的PID控制器,它保留了比例,积分和微分部分的相同的线性结构,但具有恒定系数自我调整离散时间来控制增益的功能;文献[7]针对模糊PID控制器采用三角形隶属函数的输入.文中为了进一步的提高加工效率、精度、稳定性等,在组合加工平台中使用永磁同步直线电机与模糊自适应PID控制策略的结合,并使用Simulink软件对所建立的仿真模型进行验证.以期使加工平台的超调量在理想情况下达到0.01%,单轴速度达到60m·min-1,调节时间达到0.5s以内.
1 模糊自适应PID控制器设计
误差e和误差的变化率ec在模糊控制器当中主要作用是对PID三个参数进行自动调整.其中,e和ec作为系统输入,PID中比例系数kp、积分系数ki和微分系数kd三个参数作为输出,使用确定的模糊关系,在系统运行过程中,e和ec通过模糊运算,对PID参数进行实时调整,以此来提高整体系统的动、静态性能.在模糊自适应PID控制系统中,kp、ki和kd对整体系统有着不同的效果.不同参数的取值对整体系统都会产生一定的影响,在进行取值时,需要考虑系统运行过程中的稳定性、可靠性以及误差等因素,选取合适的参数值.制定模糊规则时需要对输入和输出进行定义,本文根据需要将输入与输出划分为七个不同的词语分别代表了七个不同的定义,用{NB、NM、NS、O、PS、PM、PB}作为模糊子集对应七个词语,对应的论域为[-3,3].隶属度函数与模糊子集如图1~2所示.

图1 系统参数的隶属度函数Fig.1 Membership functions

图2 模糊子集Fig.2 Fuzzy sets
模糊控制器的输出是PID参数的改变量,为了提高系统各方面的特性,各个参数的调整需要相互照应.由于每一个参数都对应着七个定义词语,在确定e和ec的定义词语之后,kp、kd和ki的取值需要与已确定的条件进行照应,以保障整体系统运行时具有稳定性强、超调量小以及可靠性高的特点.另外,在仿真过程中会发生仿真结果受到外部干扰而产生振动的情形,此时需要对ec与kd进行进一步的调节,使两个参数间反比关系更加明显的同时,尽可能的保证kd的定义词语处于中间位置,这样有助于保障系统的正常运行[4].根据以上条件,完成模糊规则表的制定,见表1~3.

表1 kp的模糊规则表Tab.1 Fuzzy rules of kp

表2 ki的模糊规则表Tab.2 Fuzzy rules of ki
根据模糊规则表可以看出,每一个规则都对应着49个规则,根据Mamdani推理法来完成模糊推理,对应的语句为
If e is NB and ecis NB Then kpis PB,kiis NB,kdis PS;
If eis NB and ecis NM Then kpis PB,kiis NB,kdis PS;
If e is NB and ecis NS Then kpis PM,kiis NM,kdis O;
…

表3 kd的模糊规则表Tab.3 Fuzzy rules of kd
文中使用加权平均法完成模糊量去模糊化处理,计算得到最终输出的清晰量.输入变量与输出变量的关系如图3所示.
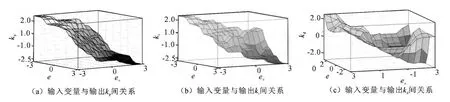
图3 输入变量与3个输出变量的关系Fig.3 Relationship between input variables and three output variables
2 系统模型建立与仿真分析
2.1 系统模型建立
模糊自适应PID模型需要以控制器设计的理论为基础来进行设计与建立,与直线电机模型相结合,最终实现直线电机模糊自适应PID仿真模型,如图4所示.其中,Constant为常量;Gain为增益;Derivative为微分环节;Saturation为饱合输出;Fuzzy Logic Controller为模糊逻辑控制器;Step为阶跃信号;PID Controller为PID控制器;Universal Bridge为通用桥;Scope为示波器;Pmlsm为直线电机模块.
在完成整体仿真模型的建立后,对直线电机中的相关参数进行设定.
2.2 仿真结果分析
本次研究工作采用TI公司32位浮点DSP芯片TMS320F28335作为数控系统的控制核心.永磁同步直线电机采用西门子公司的1FN3型.其中,动子质量M 为10kg,黏性摩擦因数为0.2N·s·m-1,电感为0.001H.整体系统由永磁直线同步电机、动子底板、定子底板、光栅尺、限位开关、零位开关及导轨副等组成.首先在无外部干扰的情况下对整体模型进行仿真,并与传统PID控制系统的仿真结果进行对比,对比结果如图5所示.

图4 直线电机模糊自适应PID控制整体仿真模型Fig.4 Overall simulation model to linear motor fuzzy adaptive PID control

图5 未加扰动的传统PID控制与模糊自适应PID控制的速度响应曲线Fig.5 Speed response curves of traditional PID control and fuzzy adaptive PID control without disturbance
由图5可以看出,基于模糊自适应PID控制的直线电机速度的超调量要明显小于传统的PID控制,在达到稳定控制的过程中整体较为平滑,对整体系统的影响较小,提高了系统整体的稳定性.图6为外加100N情况下传统PID控制系统与模糊自适应PID控制系统的仿真结果对比.
由图6可以看出,直线电机控制系统在加入振动之后仿真结果波动明显增加并与PID控制相比,模糊自适应PID的仿真结果较平顺,稳定性与可靠性较好,采用模糊自适应PID控制方法的仿真波形平稳,超调量小,运动过程中对整体控制系统的影响较小,能够有效的提高整体系统的稳定性,具有较高的抗干扰能力,达到控制要求.

图6 加扰动的传统PID控制与模糊自适应PID控制的速度响应曲线Fig.6 Speed response curves of traditional PID control and fuzzy adaptive PID control with disturbance
3 结 论
文中以直线电机仿真模型的建立为基础,实现了直线电机的模糊自适应PID控制,对直线电机模糊自适应PID控制模型进行仿真,得到的结论为
1)在理想情况下,模糊自适应PID控制超调量为0.01%,调节时间为0.2s;外加100N干扰的情况下,模糊自适应PID控制的超调量为0.05%,调节时间为0.4s,速度波动范围为0.9~1.1m·s-1.
2)模糊自适应PID较传统PID控制显著提高了控制系统的稳定性、抗干扰能力以及鲁棒性,达到了圆柱零件加工精度要求.
[1] 叶云岳.直线电机原理与应用[M].北京:机械工业出版社,2000.YE Yun-yue.Principles and Applications of Linear Motor[M].Beijing:China Machine Press,2000.(in Chinese)
[2] 何瑞玲.基于模糊自适应PID控制的永磁同步电机调速系统研究[D].西安:长安大学,2014.HE Rui-ling.Study on the Speed Regulation System of Permanent Magnetic Synchronization Motor Based on Fuzzy Adaptive PID Controller[D].Xi’an:Chang’an University,2014.(in Chinese)
[3] 孙华,张涛.永磁同步直线电机的模糊PID控制及仿真试验[J].机床与液压,2011,39(5):108.SUN Hua,ZHANG Tao.Fuzzy PID Control and Simulation Experiment on Permanent Magnet Linear Synchronous Motor[J].Machine Tool & Hydraulics,2011,39(5):108.(in Chinese)
[4] 邹敏.基于DSP的直线电机模糊PID控制系统研究与实现[D].武汉:武汉理工大学,2010.ZOU Min.Research and Implementation of Fuzzy PID Control System Based on DSP for Linear Motor[D].Wuhan:Wuhan University of Technology,2010.(in Chinese)
[5] 罗天资,陈卫兵.直线电机模糊增量PID控制算法的研究[J].测控技术,2011,30(2):56.LUO Tian-zi,CHEN Wei-bing.A Study of Fuzzy Incremental PID Control Algorithm for Linear Motor[J].Measurement & Control Technology,2011,30(2):56.(in Chinese)
[6] TANG K S,KIM F M.An Optimal Fuzzy PID Controller[J].IEEE Transactions on Industrial Electronics,2001,48(4):757.
[7] MOHAN B M.Analytical Structures for Fuzzy PID Controllers[J].IEEE Transactions on Fuzzy Systems,2008,16(1):520.
【相关参考文献链接】
高嵩,朱峰,肖秦琨,等.机载光电跟踪系统的模糊自整定PID控制[J].2007,27(4):312.
高嵩,徐晓霞,肖秦琨,等.机载光电跟踪系统的模糊自适应控制[J].2009,29(6):565.
樊泽明,冯卫星,王亮,等.智能阀门定位器PID单参数模糊自适应控制设计[J].2007,27(6):563.
来跃深,司瑞强.专家PID控制器的CPLD设计[J].2007,27(5):421.
王航宇,倪原.基于卡尔曼滤波器的电动汽车PID控制系统设计[J].2008,28(3):267.
秦刚,陈凯,高惠中,等.内模PID控制器在智能车转向系统中的应用及仿真[J].2011,31(7):649.
秦刚,王新茹.PID结构广义预测控制算法的仿真及分析[J].2012,32(2):162.
谭宝成,马天力.无人车运动稳定性的模糊神经网络PID控制[J].2013,33(4):334.
谭宝成,王大为,俞开文.变结构PID在锻造操作机控制系统中的应用[J].2009,29(5):466.
谭宝成,成法坤.自适应模糊PID在中频弯管机温度控制中的应用[J].2010,30(2):191.
谭宝成,党莉.变速积分增量式PID在气力除灰控制系统中的应用[J].2010,30(5):478.
谭宝成,于向恩.变结构PID在铸坯去毛刺机中的应用[J].2012,32(2):147.
谭宝成,康祖清.模糊PID算法在定型机温控系统上的应用[J].2012,32(11):895.
王昕炜,苗荣霞.锻造操作机大车行走机构的单神经元自适应PID控制[J].2014,34(12):1012.
郭全民,雷蓓蓓.汽车磁流变半主动悬架的模糊PID控制研究[J].2015,35(3):192.
杨盛泉,刘白林,裴昌幸.灰色预测PID模型的建筑构件耐火试验炉控制系统[J].2012,32(4):315.
张荷芳,王洁,易善伟.基于Smith预估的模糊PID串级中央空调水系统控制[J].2012,32(4):330.
李聚锋,倪原,刘智平,等.某飞行器舵机控制的模糊PID算法[J].2013,33(3):198.
钟旭佳,高晓丁,严楠.电液比例压力控制系统的PID参数优化[J].2015,35(2):106.
