有数据包丢失奇异网络控制系统H控制器设计
2015-02-11邱占芝赵丽娜石磊
邱占芝,赵丽娜,2,石磊
(1.大连交通大学 软件学院,辽宁 大连 116028; 2. 大连科技学院 电气工程系,辽宁 大连 116052)
有数据包丢失奇异网络控制系统H控制器设计
邱占芝1,赵丽娜1,2,石磊1
(1.大连交通大学 软件学院,辽宁 大连 116028; 2. 大连科技学院 电气工程系,辽宁 大连 116052)
针对广泛存在于许多领域和行业的奇异被控系统模型,考虑网络控制环境下存在的网络诱导时延、数据包丢失、外部扰动、奇异系统结构不稳定性和脉冲行为等复杂因素,利用Lyapunov和线性矩阵不等式方法,研究了状态反馈控制方式下奇异网络控制系统H控制器设计和优化问题,提出了奇异网络控制系统状态反馈H控制器存在的条件、H控制器设计及其优化方法以及相应的扰动衰减度求取方法。系统仿真实例表明了提出的设计方法有效且可行。
奇异网络控制系统;H控制器设计;Lyapunov方法;线性矩阵不等式;数据包丢失;网络诱导时延;脉冲行为;扰动衰减度
引随着网络控制系统(networked control systems,NCS)应用领域的不断拓展,有关NCS控制理论与应用技术的研究已经引起国内外专家学者的广泛关注。在NCS存在的诸多问题中,时延和数据包丢失一直是影响系统性能质量QoP(quality of performance)的主要因素。无论时延呈现恒定的、随机的、周期的,还是呈现不确定或马尔可夫等特性,时延总会影响系统的稳定性,使系统的稳定范围变窄, 在一定条件下甚至使系统失稳,消除时延、减少时延对系统的影响始终是系统控制的目标[1-5]。对于数据包丢失,却存在主动丢包和被动丢包2种情况:在工业实时控制系统中,为保证信号的及时更新和采样数据的有效性,往往需要主动丢弃一定时间内未到达目标节点的数据包,及时发送和接收新数据,这种主动丢包策略有助于提高系统的实时性;在NCS的网络通信中,由于网络通信机制和带宽资源受限等因素的影响,节点竞争通信中往往出现数据包丢失,这种被动的数据包丢失会加剧系统的通信时延,进一步降低系统的控制性能,改变闭环系统的特性结构。大量的研究成果表明:时延和被动的数据包丢失不仅使系统的结构特性发生改变,影响系统的稳定性和控制性能,而且使系统丧失定常性、完整性、因果性和确定性,研究NCS的时延、丢包补偿与控制方法是非常必要的。然而,现有的许多有关时延和数据包丢失的NCS研究成果[6-11],其被控对象大多是线性、非线性正常系统。随着NCS应用领域的不断扩大,被控对象为奇异系统的奇异网络控制系统(singular networked control system, SNCS)的控制问题亟待研究。SNCS既包含了NCS的网络通信不确定性,又包含奇异系统本身的结构不确定性和脉冲响应等特性,是具有挑战性的研究课题,近年来已经引起专家学者的广泛关注[12-16],其中,文献[12]研究了网络环境下时滞广义系统H控制器设计问题,给出了系统正则、稳定、无脉冲的条件,获得了具有较小保守性的H性能指标;文献[13]和文献[14]研究的是奇异网络控制系统的稳定性条件问题;文献[15]研究了短时延奇异网络控制系统的H控制问题,但考虑的是传感器和执行器时钟驱动、控制器事件驱动情况,且没有考虑数据包丢失问题;文献[16]考虑传感器时钟驱动、控制器和执行器事件驱动情况下,研究了奇异网络控制系统的H控制问题,但没有考虑数据包丢失情况;同时具有时延和数据包丢失的SNCS的H控制研究还鲜见报道。
文中针对传感器时钟驱动、控制器和执行器事件驱动的SNCS,同时考虑时延、数据包丢失和外部输入扰动等因素,研究状态反馈方式下该类系统的H控制器设计和优化控制方法问题,给出H控制器和优化控制器设计方法和扰动衰减度的求解方法,并通过系统仿真实例说明研究成果的有效性和可行性。
1 问题描述与分析
在NCS中,通信网络的带宽由系统各节点所共享。当传感器、控制器和执行器通过网络传输数据时,可能会出现节点竞争失败、网络拥塞、网络瞬间连接中断等情况,使得节点接收数据不完整、数据出错、数据包在一定时间内未达到目标节点,通常将这种情况称为数据包丢失。例如,在采用CSMA/CD协议的以太网中,发生竞争冲突的系统节点将按照二进制指数退避算法BEB(binary exponential backoff)等待一定时间再监听网络是否空闲,在尝试16次监听仍有冲突后,节点将放弃传输,并发出传输失败报告,这导致了随机时延和数据包丢失的发生。图1所示的SNCS中, 被控对象是具有脉冲特征的奇异系统,w为输入外部扰动,x为测量状态,u为控制输入,z是期望输出。测量传感器时钟驱动,按恒定周期采样被控对象的状态,得到的测量数据通过网络传输给控制器节点。控制器接收到传感测量数据后立即进行控制计算,并发送给执行器节点。执行器接收到控制信号后立即进行调节操作。当整个闭环回路的网络诱导时延不超过一个采样周期T时,传感器到控制器的时延可以并入控制器与执行器一端,记为τ。系统的控制目标是保证系统稳定运行,对于外部扰动w,系统期望输出z尽可能不受影响或非常小。
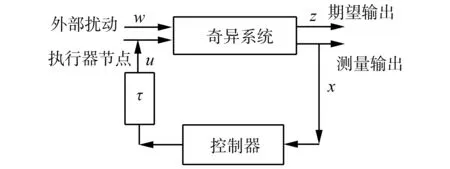
图1 SNCS一般结构
对于该系统,当数据接收节点出现数据包丢失时,该节点仍然使用前一时刻的值,新数据包到达取代过期数据被节点采用。这样,一个存在数据包丢失的网络可以视为按一定速率切换的开关K,因此,存在时延、数据包丢失、输入扰动的SNCS结构如图2所示。
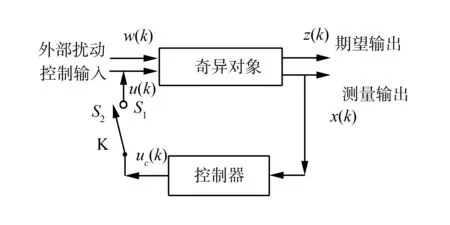
图2 具有数据包丢失的 SNCS 结构
当无数据包丢失时,网络视为接通,开关K指向S1端,第k周期u(k)=uc(k);当有数据包丢失时,网络视为断开,开关K指向S2端,u(k)=u(k-1)。
奇异被控对象模型描述为式(1):
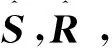
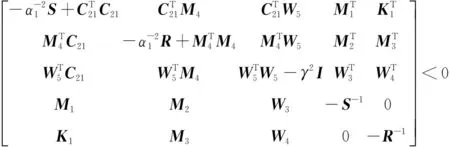
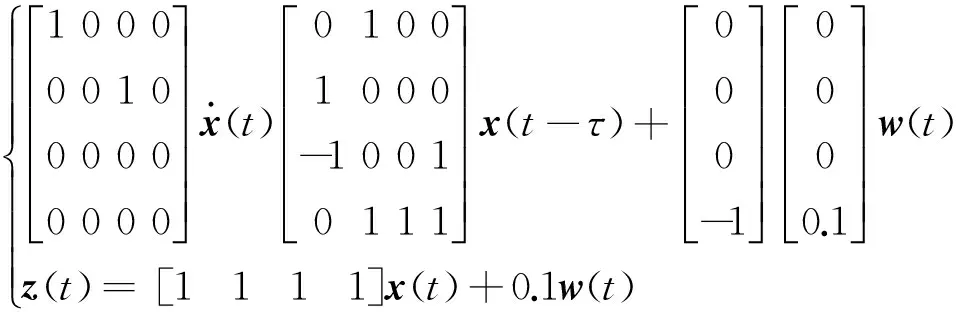
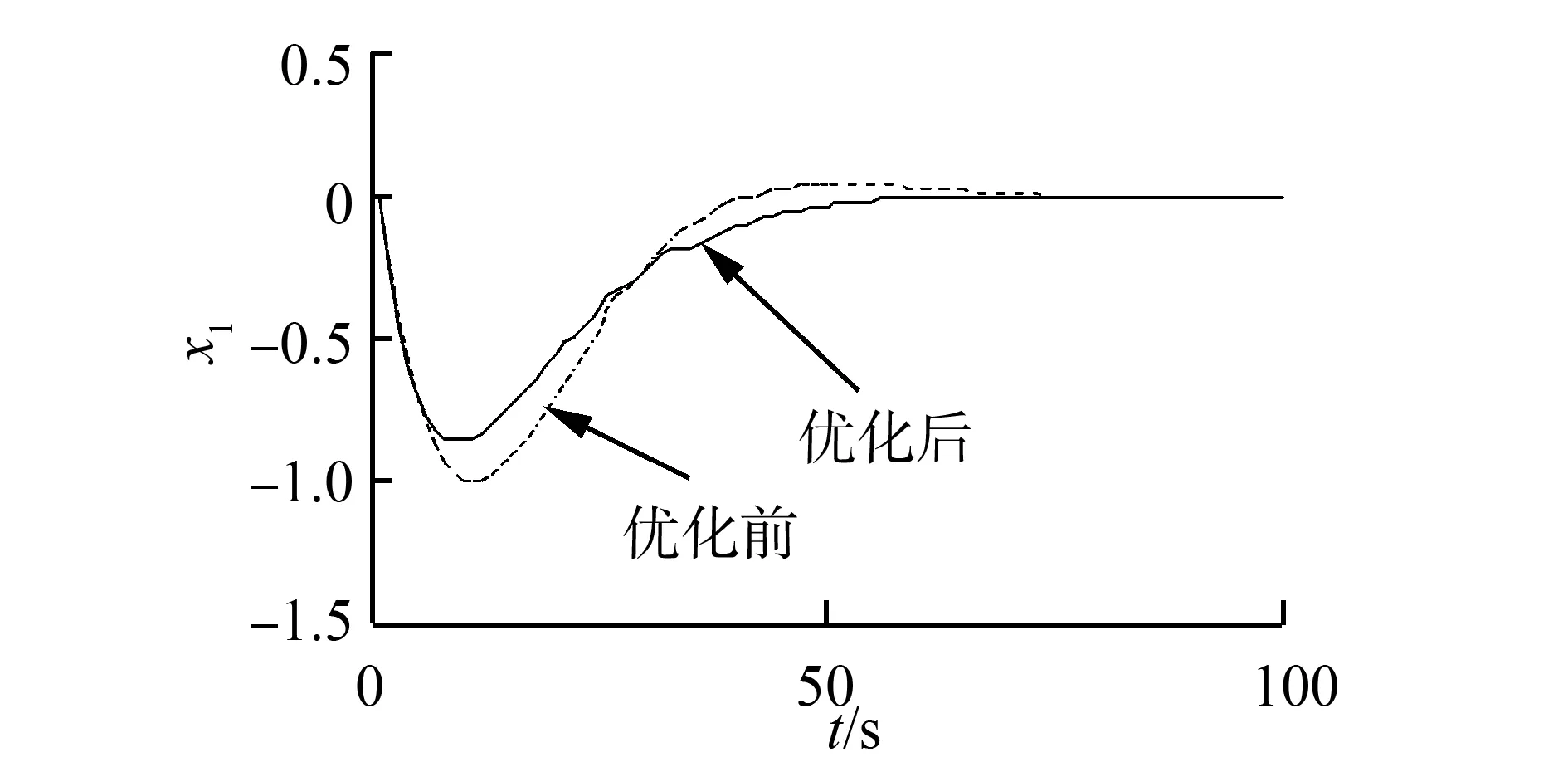
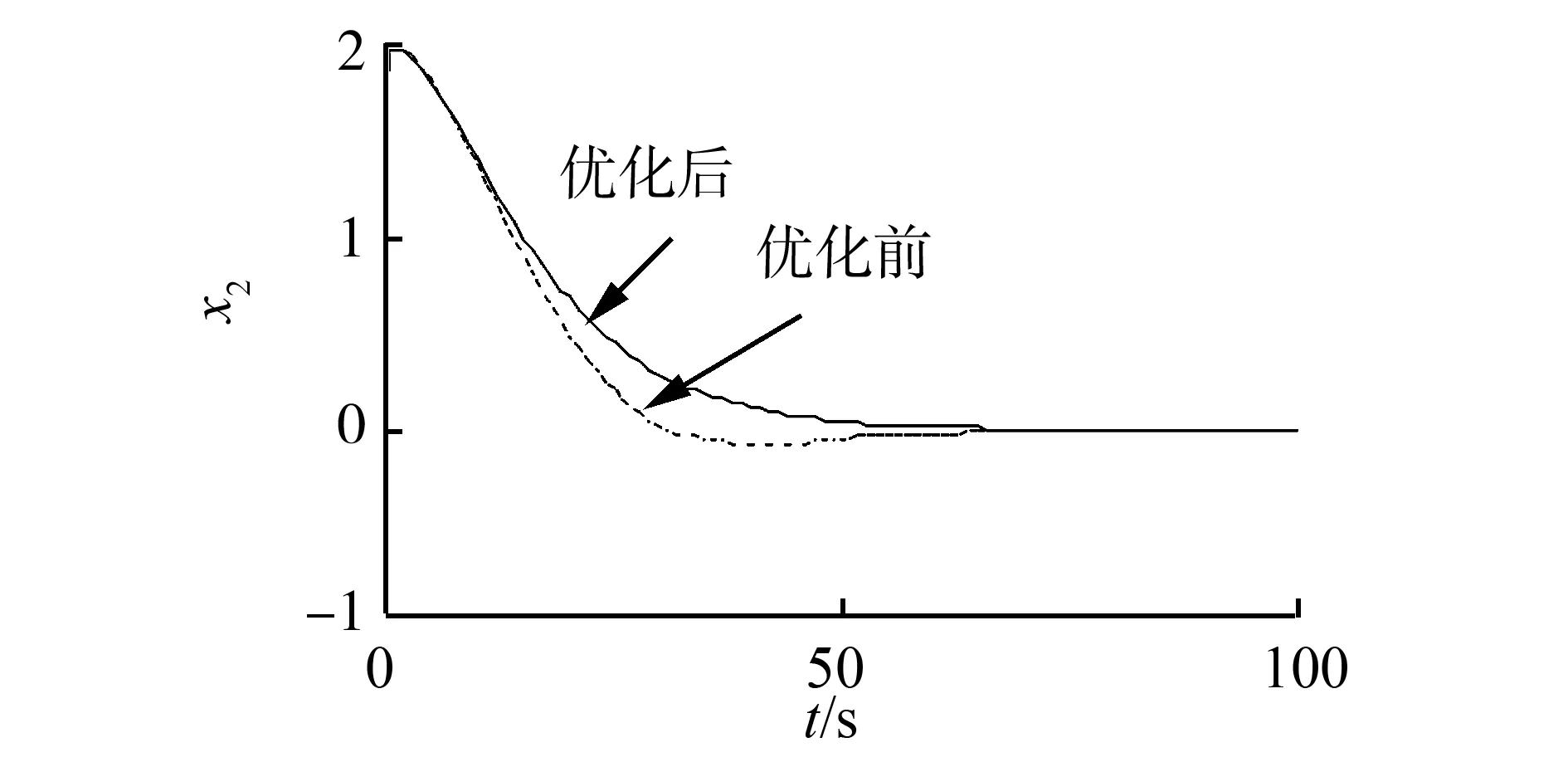
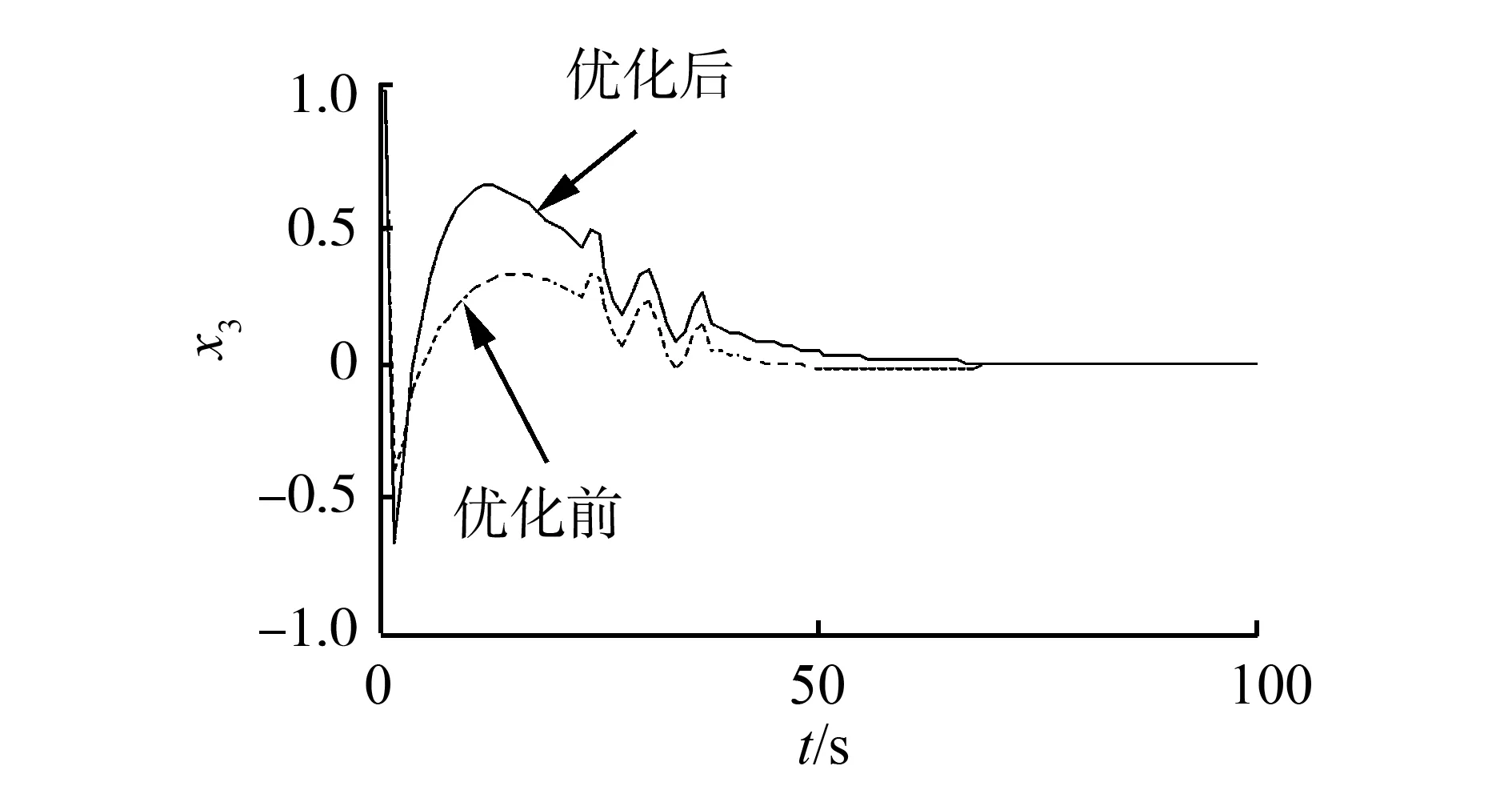
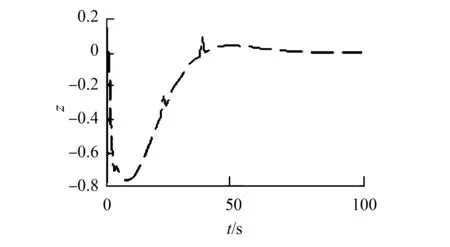
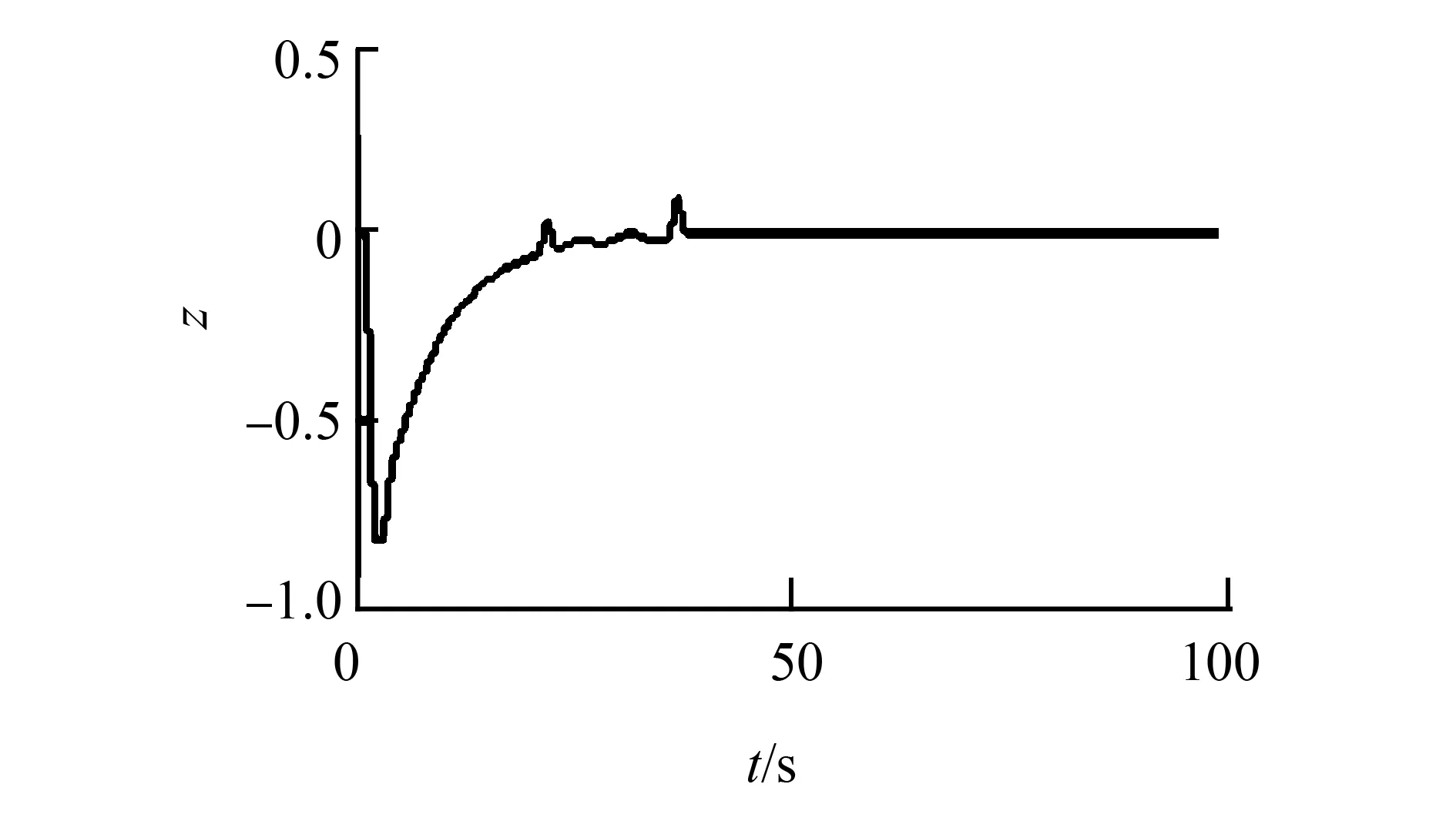
式中:x(t)∈Rn,u(t)∈Rm和z(t)∈Rl分别表示奇异被控对象的状态、控制输入和期望输出;E,A∈Rn×n,B∈Rn×m和C2∈Rl×n皆为定常矩阵;E为奇异矩阵,满足rank(E)=q 为分析方便,做合理假设如下: 1)奇异被控对象全部状态可测,通过调整系统局部结构配置使得系统正则,且满足下面条件之一: (1)degdet(sE-A)=rank(E),(degdet(·)表示行列式的次数,rank(·)表示秩; 2)传感器时钟驱动,控制器和执行器事件驱动。 3)整个闭合回路的网络诱导时延τ小于等于一个采样周期。 4) 网络信息单包传输,且无时序错乱,数据包丢失率是确定的。 5) 系统外部扰动为有限能量,即从w(k)到z(k)的闭环传递函数T(z)满足‖T(z)‖是标量。 根据假设条件(2)~(4),当网络诱导时延τ≤T时,在一个周期内控制输入u的量值描述是分段连续的,因此被控系统的离散化形式为式(3): 式中: 因被控对象全部状态可测,采用状态反馈控制,其控制器模型表示为式(4): 当无数据包丢失时,u(k)=uc(k),联立式(3)和式(4),得到: 记M1=Ad+B10K1,M2=B11(τ)-B10(τ)K2B2, 无数据包丢失时,状态反馈SNCS闭环模型为式(5): 当有数据包丢失时,考虑式(3)和u(k)=u(k-1),并记M5=B10(τ)+B11(τ),可以得到: 有数据包丢失时,状态反馈SNCS闭环模型为式(6): 综上2种情况,同时存在时延、数据包丢失和外部扰动的状态反馈SNCS闭环模型表示为式(7): 由此得到结论:当数据包丢失率r一定时,具有时延、数据包丢失和外部扰动的状态反馈SNCS闭环系统模型是由数据包丢失率r约束的异步动态切换系统,系统的稳定性和控制性能将由网络诱导时延、数据包丢失率共同决定。 H控制定义对于正常数γ,奇异被控对象式(1)通过网络实施状态反馈控制,当网络存在时延和数据包丢失时,其闭环系统指数稳定;在初始条件(x(0)=0)下,外部扰动w(k)和被调输出z(k)满足H范数约束条件‖z(k)‖2≤γ‖w(k)‖2,则称奇异被控对象式(1)可实现γ-次优状态反馈H控制,系统扰动衰减度为γ,相应的状态反馈控制器称为γ-次优状态反馈H控制器;进一步优化求解使γ最小的状态反馈H控制器称为γ-最优状态反馈H控制器。 V(xk+1)-V(xk)≤(αi-2-1)V(xk) 引理2对于实矩阵W、M、N和F(k),其中,W对称,任意F(k)满足FT(k)F(k)≤I关系,如果不等式W+MF(k)N+NTFT(k)MT<0,当且仅当存在标量ε>0,使得W+εMMT+ε-1NTN<0。 首先给出具有时延和数据包丢失的状态反馈SNCS指数稳定性条件: 选择正定矩阵S、R,定义满足引理1的Lyapunov函数为式(11): 当无数据包丢失时,考虑闭环系统式(7), 令: 则式(12)可表示为 式中: 利用Schur补性质,式(13)可以变换为 式(14)两边左乘、右乘diag(P-1,Q-1,I,I),得 当有数据包丢失时,考虑闭环系统式(7)和u(k)=u(k-1),可以得到: 式中: 定理2给出H控制器存在的条件。 则存在H控制器,使得SNCS闭环模型式(7)可实现γ-次优状态反馈H控制,扰动衰减度为γ。 证明根据H控制定义,当‖z(k)‖2≤γ‖w(k)‖2成立时,令 选择Lyapunov函数为 若系统式(7)指数稳定,在零初始条件下,对于∀w(k)∈L2[0,),有: 当无数据包丢失时,展开式(20),得到: (C21x1(k)+M4u(k-1)+W5w(k))T(C21x1(k)+ M4u(k-1)+W5w(k))-γ2wT(k)w(k)+ (M1x1(k)+M2u(k-1)+W3w(k))TS(M1x1(k)+ M2u(k-1)+W3w(k))+(K1x1(k)+ M3u(k-1))TR(K1x1(k)+M3u(k-1))- 利用Schur补性质,式(21)可变换为 类似地,式(22)进一步变换,即可得到式(18)。 当有数据包丢失时,u(k)=u(k-1),根据式(20)可以表示为 (C21x1(k)+M4u(k-1)+W5w(k))T(C21x1(k)+ M4u(k-1)+W5w(k))-γ2wT(k)w(k)+ (Adx1(k)+M5u(k-1)+W0w(k))TS(Adx1(k)+M5u(k-1)+W0w(k))+u(k-1)TRu(k-1))- 式中: 利用Schur补性质,对式(23)做类似变化,即可得到式(19),定理2证毕。 注4因为具有时延和数据包丢失的奇异网络控制闭环系统模型是由数据包丢失率r约束的异步动态切换系统,其闭环系统模型随着数据包丢失的存在与否在式(6)和式(5)之间切换,在定理1和定理2中,有、无数据包丢失的情况都考虑在内所进行的证明,因此,本文设计的控制器适用于数据包丢失与否的任意情况。 (25) 证明若存在状态反馈H控制,根据定理2,展开M1~M4,W3~W5,用符号“*”表示不等式对称项,不等式(18)可表示为 式(28)可以表示为 由引理2,式(29)成立,当且仅当存在标量ε>0,使得式(30)成立: 由Schur补性质,式(30)可进一步变换为式(31): 式(31)左、右乘diag(S-1,R-1,I,I,I,I,I,I,I,I),令 则式(31)等价于式(25)。 类似地,式(19)可以表示为 γ-次优状态反馈H控制器参数为 由此得到γ-次优状态反馈H控制器式(27),扰动衰减度为证毕。 定理4对于SNCS 式(7),如果式(33)优化问题有可行解: 则γ-最优状态反馈H控制器为式(34): 注5利用MATLAB工具箱LMI中的可行性问题求解器feasp求解定理2,如果有可行解,证明系统可以实现H控制,进一步求定理3的可行解,即可得到γ-次优状态反馈H控制器参数和扰动衰减度;用优化问题求解器mincx求解定理4的优化解,可以得到γ-最优状态反馈H控制器参数和最小扰动衰减度。 选择奇异被控对象模型为 通过网络实施状态反馈H控制,传感器测量周期为0.1 s,网络诱导时延τk=0.01 s,数据包丢失率为0.05。 选择非奇异矩阵: 奇异被控对象可等价变换为 其离散化系统为 可求得: β=23 174,R=0.486 7。 该系统指数稳定,指数衰减度为1.033 6,H扰动衰减度为次优状态反馈H控制器为 利用LMI工具箱的mincx进行优化求解,应用定理4得到相应解为 γ-最优状态反馈H控制器为 在优化控制器u*(t)作用下,同样初始状态(0,2,1,-1)时,优化后的系统状态各分量响应曲线如图3实线所示,优化后系统期望输出z响应曲线如图4(b)所示。 (a)状态x1(t) (b)状态x2(t) (c)状态x3(t) (d)状态x4(t) (a)优化前 (b)优化后 仿真结果表明,实施H控制,系统不仅指数稳定,经控制器优化,状态分量与期望输出的震荡幅度、调节时间和尖峰毛刺明显减小,扰动衰减度从152.230 1减小到0.130 2,抗扰性能得到明显增强,期望输出的平稳性明显得到改善。 奇异系统广泛存在于电网电路、电力传输、投入产出规划、神经网络等系统中,开展奇异网络控制系统理论与方法的研究,对建立奇异网络控制系统理论体系具有重要意义。文中针对具有时延、数据包丢失和外部扰动的奇异网络控制系统,当测量传感器时钟驱动、控制器和执行器事件驱动、网络诱导时延不超过一个采样周期、数据包丢失率一定、外部扰动为有限能量等条件下,给出了奇异网络控制系统状态反馈H控制器设计方法和相应扰动衰减度求解方法,成果具有普遍意义。仿真结果表明经H优化控制后,系统的平稳性得到明显改善,扰动衰减度大大减小,也验证了分析方法和结果的有效性和可行性。 [1]ZHANG W A, YU L. A Robust control approach to stabilization of networked control systems with short time-varying delays [J]. Acta Automatica Sinica, 2010, 36(1):87-91. [2]田中大,高宪文,李琨. 基于预测控制的NCS时延补偿算法 [J]. 系统工程与电子技术, 2013, 35(10): 2165- 2169. TIAN Zhongda, GAO Xianwen, LI Kun. Networked control system time-delay compensation algorithm based on predictive control [J]. Journal of Systems Engineering and Electronics, 2013, 35(10): 2165-2169. [3]李同涛,邓丽,费敏锐,等.一类带有随机、有界时滞网络控制系统的脉冲控制[J]. 控制与决策, 2013, 28(2): 294-298. LI Tongtao, DENG Li, FEI Minrui, et al. Networked control systems with bounded random time delay based on impulsive control [J]. Control and Decision, 2013, 28(2): 294-298. [4]LI Yuan,ZHANG Qingling, QIU Zhanzhi. Stability of networked control systems with time-varying sampling periods and partially known transition probabilities[J]. International Journal of Information & Systems Sciences, 2012, 7(4):340-356. [5]游科友,谢立华.网络控制系统的最新研究综述 [J]. 自动化学报, 2013, 39(2): 101-118. YOU Keyou, XIE Lihua. Survey of recent progress in networked control systems [J]. Acta Automatica Sinica, 2013, 39(2):101-118. [6]SUN Y G, QIN S Y. Stability and stabilization of networked control systems with bounded packet dropout [J]. Acta Automatica Sinica, 2011, 37(1): 113-117. [7]严怀成,苏阵阵,张皓,等.具有时变时滞和多包丢失的网络控制系统量化H控制[J]. 控制理论与应用, 2013,30(4): 469-474. YAN Huaicheng, SU Zhenzhen, ZHANG Hao, et al. Quantized H-infinity control for networked control systems with time-varying delay and multiple packet dropouts [J]. Control Theory & Applications, 2013, 30(4): 469-474. [8]YANG R N, SHI P, LIU G P, et al. Network-based feedback control for systems with mixed delays based on quantization and dropout compensation [J]. Automatica, 2011, 47(12): 2805-2809. [9]LI J N, YU H B, YUAN D C, et al. Co-design of networks and control systems with synthesized controller [J]. InternationaL Journal of Information and Systems Sciences, 2011 ,7(1): 131-140. [10]LIU M, CAO X B, SHI P. Fuzzy-model-based fault-tolerant design for nonlinear stochastic systems against simultaneous sensor and actuator faults [J]. IEEE Transactions on Fuzzy Systems, 2013, 21(5): 789-799. [11]李媛, 张庆灵, 邱占芝等. 具有时变采样周期网络控制系统的严格耗散控制[J].控制理论与应用, 2013, 30(9): 1170-1177. LI Yuan, ZHANG Qingling, QIU Zhanzhi, et al. Strictly dissipative control for networked control systems with time-varying sampling periods [J]. Control Theory & Applications, 2013, 30(9): 1170-1177. [12]杨帆,邱占芝,周世玉. 网络环境下时滞广义系统H控制器设计[C]//第31届中国控制会议论文集. 合肥,中国, 2012:5933-5937. YANG Fan, QIU Zhanzhi, ZHOU Shiyu. The designing of H-infinite contrlller for the singular networked control systems with time-delay[C]//Proceedings of the 31st Chinese Control Conference. Hefei, China, 2012: 5933- 5937. [13]FENG Y F, ZHU X L, ZHANG Q L. Delay-dependent stability criteria for singular time-delay systems[J]. Acta Automatica Sinica, 2010, 36(3): 433-437. [14]QIU Z Z, ZHANG Q L, ZHAO Z W. Stability of singular networked control systems with control constraint[J]. Journal of Systems Engineering and Electronics, 2007,18(2 ): 290-296. [15]王燕锋, 井元伟, 张嗣瀛,等. 一类短时延的广义网络控制系统的鲁棒H控制 [J]. 东北大学学报:自然科学版, 2011, 32(5): 609-613. WANG Yanfeng, JING Yuanwei, ZHANG Siying, et al. Robust Hcontrol for a kind of singular networked control system with short time delay [J]. Journal of Northeastern University :Natural Science, 2011, 32(5): 609-613. [16]QIU Z Z, SHI L. H-Infinite controller design of singular networked control systems [J]. Intelligent Control and Automation, 2014(5): 24-34. [17]RABELLO A, BHAYA A. Stability of asynchronous dynamical systems with rate constraints and applications [J]. IEE Proceedings: Control Theory and Applications, 2003,150: 546-550. 邱占芝,女,1960年生,教授,博士生导师,主要研究方向为网络控制系统、计算机远程监控系统、软件工程。近年来,主持国家自然科学基金、辽宁省科学研究计划、辽宁省自然科学基金等项目10余项,出版专著1部,发表SCI、EI等检索论文20余篇。 赵丽娜,女,1982年生,讲师,主要研究方向为智能电网、网络控制等。 石磊,男,1963年生,副教授,主要研究方向为网络控制系统。 Hcontroller design for singular networked control systems with data packet dropout QIU Zhanzhi1, ZHAO Lina1,2, SHI Lei1 (1.Software Technology Institute, Dalian Jiaotong University, Dalian 116028, China; 2.Department of Electrical Engineering, Dalian Institute of Science and Technology, Dalian 116052, China) In this paper, the problem of Hcontroller design for singular networked control systems with delay and data packet dropout is investigated. The design and optimization of the Hcontroller are investigated in the status feedback control manner by utilizing Lyapunov and linear matrix inequality methods. TheHcontroller design takes into consideration factors such as networ-induced delay, data packet dropout, external disturbance, structural instability of singular systems, and impulse behavior in the network control mode.In addition, the condition for the existence of the status feedback Hcontroller in the singular networked control system, the design and optimization method of Hcontroller and the corresponding disturbance decay rate solutions are presented. Simulation examples showed that the presented design method is effective and feasible. singular networked control systems; Hcontroller design; Lyapunov method; linear matrix inequality; data packet dropout; network-induced delay; impulse behavior; disturbance decay rate 2013-12-15. 日期:2015-01-13. 国家自然科学基金资助项目(61074029,61104093 );辽宁省科学研究计划资助项目(2011216007). 邱占芝. E-mail:zhanzhiqiuok@163.com. 10.issn.1673-4785.201312015 http://www.cnki.net/kcms/detail/23.1538.TP.20150113.1130.003.html TP13 A 1673-4785(2015)01-0120-11 邱占芝,赵丽娜,石磊.有数据包丢失奇异网络控制系统H控制器设计[J]. 智能系统学报, 2015, 10(1):120-130. 英文引用格式:QIU Zhanzhi, ZHAO Lina, SHI Lei.Hcontroller design for singular networked control systems with data packet dropout[J]. CAAI Transactions on Intelligent Systems, 2015, 10(1): 120-130.





2 H控制器设计







3 仿真实例
4 结束语



