低重力模拟系统主动悬吊方式控制研究
2015-02-11朱齐丹陈力恒卢鸿谦
朱齐丹,陈力恒,卢鸿谦
(1. 哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001; 2. 哈尔滨工业大学 控制理论与制导技术研究中心,黑龙江 哈尔滨 150001)
低重力模拟系统主动悬吊方式控制研究
朱齐丹1,陈力恒1,卢鸿谦2
(1. 哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001; 2. 哈尔滨工业大学 控制理论与制导技术研究中心,黑龙江 哈尔滨 150001)
为了简化低重力模拟系统设计难度,方便巡视车得到更准确的测试结果,在主动悬吊方式下提出了直接对力回路进行控制并辅以位置控制的方案。在建立系统模型过程中考虑了影响系统鲁棒稳定性的参数不确定与可转化为乘性不确定性的延时问题,并实现了不确定性的分离;根据系统受到巡视车带来的干扰、减速器摩擦力矩与本身不确定性等问题,针对性地设计了H控制器对系统综合,通过实验检验,控制器有效抑制了不确定性与干扰的影响,系统的控制精度得到了保证。
H控制;鲁棒控制;力矩电机;低重力;恒张力;参数不确定;月球巡视车;延时
利用巡视车在星球的表面实地考察是我国未来深空探测计划的重要任务,为了保证巡视车能够适应星球的低重力环境保证勘探任务顺利进行,在地球表面模拟低重力效果进而测试巡视车动力性能成为了一项不可缺少的环节[1]。
模拟低重力的传统方法有气浮法、配重法、主动悬吊法等。其中文献[2-3]提出的气浮法主要应用于二维平面内的模拟,对于巡视车所需要进行的爬坡测试等其模拟效果并不理想。对此文献[4-5]提出引入配重块抵消重力方法以实现三维空间的测试,但由于系统中缺少主动控制,对于路面颠簸给低重力模拟系统带来的竖直方向干扰,系统的抑制效果不好。对此文献[6-9]提出了电机与弹簧协同工作的主动悬吊法,为了减少转轴上摩擦力矩影响,该方法采用“内-外环路设计方法”先将力矩电机自身闭环在速度内回路后,利用电机收放绳索的速度对外环的吊索张力进行控制,其中速度回路设计的依据是将带宽提高到力回路的5倍以上,以实现与后续力回路设计的解耦;然而速度回路在力回路中有阻尼作用,速度回路带宽的提高会带来力回路控制精度的下降,平衡内环速度回路的带宽增加了系统设计难度,并且文献[7-8]均没有考虑等效弹性系数的不确定性和系统延时对于鲁棒稳定性的影响。
本文在主动悬吊法的基础上改变整体的控制方案,采用利用力矩电机直接对力回路进行控制的方式,避免对速度回路的设计,并在滚筒处加装码盘引入位置控制;针对转轴的摩擦转矩及巡视车竖直方向加速度干扰,采用H控制方法对系统进行综合,同时解决了系统的参数不确定性与系统延时对于鲁棒稳定性的影响。通过在xPC Target实验平台进行的硬件在环实验,结果表明控制器对于上述问题具有良好的抑制能力,并且低重力模拟系统的控制精度得到了保证。
1 系统数学模型的建立

图1 恒张力子系统结构图
用于为巡视车模拟竖直方向低重力环境的恒张力子系统结构如图1,它主要由缓冲机构与电机部分组成,其中为了方便后续说明,在图1中设缓冲机构的横纵支架的中心轴线分别为ox1与oy1,摆杆所在中心轴线为ox2,o点为3条轴线交点。为了保证巡视车所受低重力环境在巡视车上下颠簸时保持恒定,需要对吊索张力T进行调节,使其稳定在平衡位置θ=0时的吊索张力T0上。文献[7]中已对缓冲机构工作原理做出了详细说明,并推导出缓冲机构与吊索张力T关系为
(1)
令l′为平衡位置距巡视车的吊索长度,xd为巡视车竖直方向的位移,xu为吊索收放长度,由吊索长度关系可得
l′+xd-lsinθ+l=l+l′+xu
整理得
xu=xd-xΔ
(2)
设图1中滚筒半径为rg,滚筒转动角度为α,由几何关系得到:
xu=αrg
(3)
设巡视车位于平衡位置时电机输出的力矩Mm0,此时减速器的静摩擦力矩折算到减速器输出轴为Mjf,减速器减速比为i,T0本身带有表示竖直向下的负号,则平衡时有
iMm0+T0rg-Mjf=0
当巡视车出现扰动时电机在Mm0基础上输出力矩为MmΔ,减速器的动摩擦力矩折算到减速器输出轴为Mdf,电机转子、减速器、滚筒三者的转动惯量折算到减速器输出轴为Jd,对减速器输出轴建立转动方程:
(4)
由于系统工作时减速器摩擦力矩具有谱宽且动静状态不定的特点,因此将动静摩擦力矩统一用Mf表示,低重力模拟系统为对力的偏差ΔT的调节型系统,可将式(4)中的平衡位置剔除掉得到
(5)

(6)
将式(6)代入式(1),并考虑到xΔ=xd-αrg,有
(7)
在式(7)中可以得出通过对滚筒转角的测量从而引入位置反馈通道可以提高系统对于巡视车竖直方向干扰以及减速器摩擦力矩干扰的抑制,有助于系统的精确控制。
低重力模拟系统中力矩电机采用为交流伺服电机,由于从其内部结构上推导数学模型较为复杂且本文并不主要研究电机结构,因此可采用实验对其进行参数辨识,利用电机自带的扫频功能,辨识得到电机的等效模型:
选取状态变量
(8)
低重力模拟系统工作在平衡位置时弹簧已处于拉伸状态并为吊索张力T0提供平衡拉力,系统正常工作时吊索张力波动量ΔT不超过10 N,这对于本就处于拉伸状态且弹性系数达到数千N/m弹簧来说,此时弹簧的拉力对于ΔT变化做出的微小的伸缩不再严格遵循胡可定律,通过实验测得这种变化会导致等效弹性系数kd有ω0=5%的波动,为了保证系统的鲁棒稳定性,模型建立是需将其不确定性考虑在内。
另一个影响系统鲁棒稳定性的问题是系统存在的延时问题,由于采用串口通信的方式对电机进行控制,而串口通信时的传递位数有限,这会使得系统控制指令约有0.5 ms的延时才能到达电机,并且由于控制器在定时时间为1 ms的定时器中断处理函数内进行控制指令计算,使得相关采集的数据最高可能等待1 ms才能转化为控制指令,再考虑到控制器运算时间及系统的其他未建模特性,因此判断系统延时时间最高为2 ms[11]。为了便于后续控制器设计时对其进行处理,将其建立在系统建模中。
(9)

(10)
l(s)=|e-0.002s-1|
(11)
因此结合式(9)、(11),无法准确测得的延时问题转化为
(12)
为了减少非线性环节对控制器设计带来的难度,利用e-τs-1泰勒展开一次项将式(11)中的l(s)表示为l(s)=0.002s,式(12)可由图2表示。
为了使得不确定性不影响系统之后的控制器设计,需将不确定性分离。处理参数不确定性时可令
代入式(8),并引入
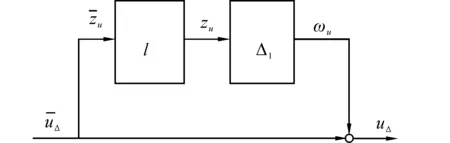
图2 乘性不确定性表示延时问题

(13)
2 控制算法设计
控制算法需要结合被控对象的特点来设计,考虑低重力模拟系统工作时所受干扰情况以及建模过程中系统本身存在的问题,可以总结低重力模拟系统具有如下特点:

2)由于减速器摩擦力矩Mf数值较高且谱很宽,因此对系统的稳定性及控制精度产生很大影响。
3)系统缓冲机构中存在等效弹性系数参数kd不确定性,系统存在已转化为乘性不确定性的延时问题。
H控制算法为鲁棒控制中的一种,它的最大特点以系统的干扰和不确定性为基础来设计控制器,将系统存在干扰及不确定性问题统一转化为系统的被调输入与被调输出,并通过小增益定理保证了被调输入输出间的无穷范数小于1时系统的鲁棒稳定性,因此低重力模拟系统采用H控制算法[10]。
为了方便计算H控制器,将系统控制结构框图如图3转化为H标准结构如图4。
wd、wmf、wt、wu分别为待设计的表述系统特性的加权函数,而zt为系统性能的评价输出。H控制算法将基于被调输入到被调输出的传递函数的无穷范数来设计控制器。
首先设计系统加权函数,wd与wmf作为输入加权函数,在H控制的标准形式中分别为巡视车竖直方向加速度与减速器的摩擦力矩做加权输入。wd与wmf的作用为调整控制器对于与wmf的抑制力度,因为的数值最高为0.7,而wmf的数值最高为3,2个干扰源在数量级上有所差别,为了对不同数量级的干扰做出针对性的抑制,因此设计wd=0.7,wmf=3,使得控制器对干扰的抑制更有针对性。

图3 系统控制结构框图

图4 H控制的标准形式
wu作为处理延时的加权函数可由乘性不确定性L(s)的最小上界确定l(s)=0.002s,为了求解控制器时加权函数可行,将其转化为带有极点并且不影响系统频率带宽内加权效果的传递函数形式:
wt为决定控制精度ΔT的加权函数,它的作用是在巡视车工作频率段f≤5 Hz,降低巡视车干扰对吊索拉力变化量影响,而对工作频段外幅频特性可能的升高不做限制,因此设计wf为低通滤波器形状传递函数,并将转折频率设为5Hz,而幅值在满足小增益定理的基础上尽量增高以惩罚各干扰因素对ΔT的影响,取幅值为0.6,即
对于H控制器求解方法较为繁琐且步骤相对固定,可通过Matlab软件的hinfric函数求解,并且hinfric函数实现在各阶控制器中寻优,所以优化效果较好。代入各变量值i=5,ξ1=0.6,k1=4.373 6×106,ω1=628,kd=1 552 N/m ,rg=0.1 m,md=8.5 kg,Jd=20 kg·m2。通过编程求得此时的控制器如式(14),系统的最优指标为1.016 6,即综合后的系统满足小增益定理,控制器保证了系统的鲁棒稳定。

(14)
3 实验结果及分析
为了验证控制器的有效性,本文采用xPC Target实验平台实现硬件在环实时检测,xPC Target采用了宿主机—目标机的技术途径,宿主机用于运行Simulink及其工具包,目标机则对底层硬件进行操作[12-18]。xPC Target实验平台具有模块化、可靠性高、成本低廉的优势,因此广泛应用于工业生产的测试与产品研发[19-24]。低重力模拟系统在xPC Target实验平台的实现框图如图5。实验目标:在巡视车处于静止、颠簸与越障3种状态下,保持吊索张力为53.5 N来为迷你巡视车提供低重力环境,并检验控制器效果。在图6~8中可以看到对于系统存在参数不确定及延时问题,控制器均保证了低重力模拟系统的鲁棒稳定。

图5 xPC Target实验平台的实现框图
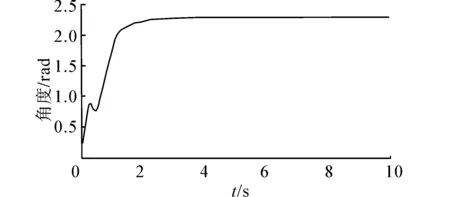
(a)码盘输出角度曲线

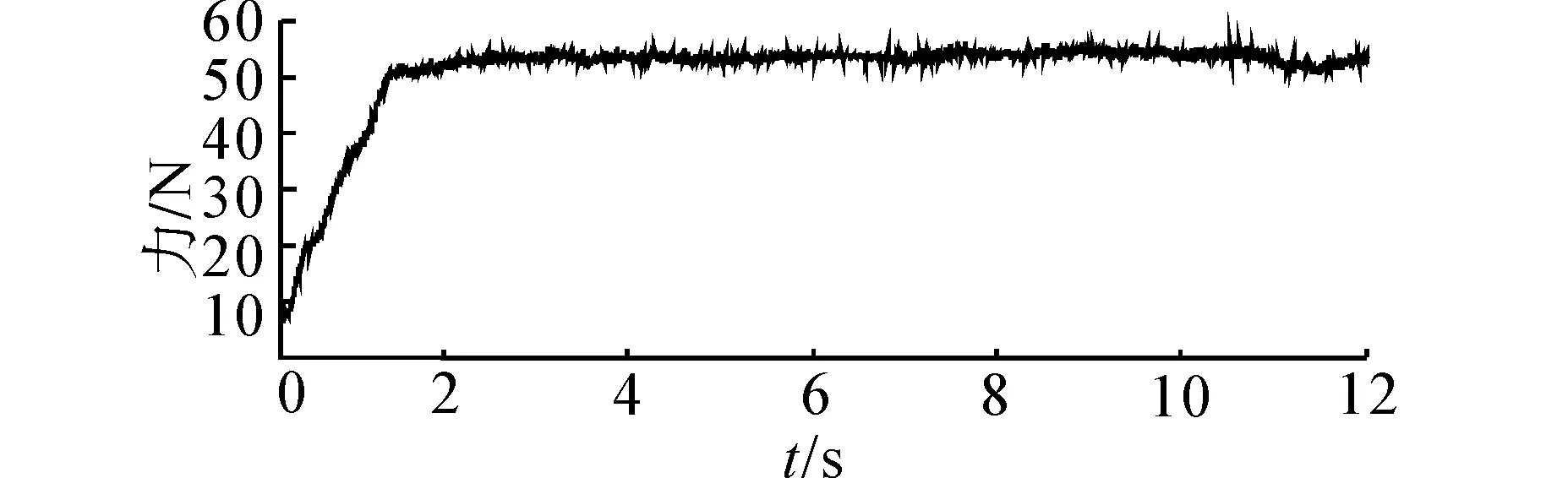
(b)力传感器数据曲线

(c) 力传感器数据曲线局部放大
在图6为巡视车被吊起后处于静止状态。可以看到电机在提起巡视车的过程中,经过3s时达到平衡点;为了保证安全,对电机的控制指令做出了限幅,因此整个吊起巡视车的过程相对平缓,并未出现超调;平衡时吊索张力为53.5±1.5 N,实现了巡视车的低重力状态模拟。
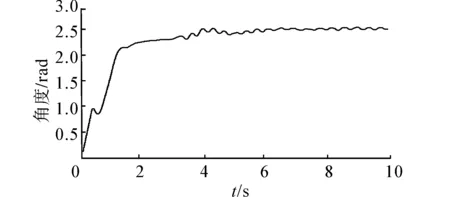
(a)码盘输出角度曲线

(b)码盘输出角度曲线局部放大

(c)力传感器数据曲线

(d) 力传感器数据曲线局部放大
图7为巡视车经过颠簸的路面。由图7(a)可得路面的颠簸幅值约为(2.5-2.4)×0.1=0.01 m,并且在巡视车上下颠簸的频率较高时,吊索张力保持在53.5±3 N。
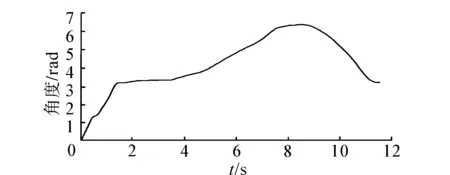
(a)码盘输出角度曲线
(b)力传感器数据曲线
(c) 力传感器数据曲线局部放大
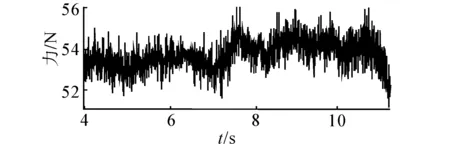
图8为巡视车跨越障碍。图8(a)中可以判断,障碍高度约为(6.2-3.2)×0.1=0.3 m,上坡时间约为4 s,下坡时间约为3 s;图8(b)中吊索拉力保持在51~56 N,上坡时的吊索拉力误差保持在1.5 N以内,而进入下坡时,在8~10 s内吊索张力变化达到2.5 N,这是由于此时加速度较大导致动态误差增大,随着坡度变缓,巡视车竖直方向加速度减小,因此10~11 s吊索张力误差逐渐减小。
综上,低重力模拟系统的吊索张力最大动态误差为3 N,即吊索张力的精确度达到94.4%,实现低重力模拟系统的精确控制。
4 结束语
本文针对巡视车测试时传统主动悬吊方式模拟低重力方法存在的速度回路带宽与力控制精度难以平衡的问题,提出直接对力回路控制并加入位置控制的控制方案;在建立系统数学模型过程中考虑了参数不确定性与转化为乘性不确定性的延时问题,实现了不确定性的分离;根据系统存在巡视车测试时竖直方向干扰、减速器摩擦转矩及系统自身的不确定性设计了H控制器。通过xPC实验平台的检验,本文提出的控制方案保证了系统的控制精度,并且有效抑制系统所受到干扰以及自身不确定性与延时问题,为低重力模拟系统的进一步完善提供了理论依据。
[1]肖福根,叶培建. 月球探测工程中的月球环境问题[J].航天器环境工程, 2006, 23(1): 1-3. XIAO Fugen,YE Peijian. Issues about lunar environment in lunar exploration project [J]. Spacecraft Environment Engineering, 2006, 23(1): 1-3.
[2]ROBERTSON A, INALHAN G, HOW J P. Formation control strategies for a separated spacecraft interferometer[C]//American Control Conference. Palo Alto, America, 1999: 4142-4147.
[3]XU Y, BROWN B, AOKI S, et al. Mobility and manipulation of a light-weight space robot[J]. Robotics and Autonomous Systems, 1994, 13(1): 1-12.
[4]BROWN H, SOLO S. A novel gravity compensation system for space robot[C]//ASCE Specialty Conference on Robotics for Challenging Environments. Albuquerque, USA, 2000, 5(3): 250-253.
[5]SATO Y, EJIRI A, IIDA Y, et al. Micro-G emulation system using constant-tension suspension for a space manipulator[C]//IEEE International Conference on Robotics and Automation. Piscataway, USA, 1991: 1893-1900.
[6]WHITE G C, XU Y S. An active vertical-direction gravity com-pensation system[J]. IEEE Transactions on Instrumentation and Measurement, 1994, 43(6): 786-792.
[7]王连明. 低重力模拟系统控制算法的研究[D].哈尔滨:哈尔滨工业大学, 2010: 10-30. WANG Lianming. Research on control algorithm of microgravity simulating system[D]. Harbin: Harbin Institute of Technology, 2010: 10-30.
[8]王乐. 低重力模拟器吊索张力控制算法研究[D].哈尔滨:哈尔滨工业大学, 2011: 11-20. WANG Le. Control algorithm on the sling tension of low-gravity simulating system[D]. Harbin: Harbin Institute of Technology, 2011: 11-20.
[9]李灏,徐志刚,郭渝萍. 月球巡视器吊点张力控制系统的设计[J].机械设计与制造, 2012(4): 50-52. LI Hao,XU Zhigang,GUO Yuping. Design of suspension point tension control system for lunar rover [J]. Machinery Design & Manufacture, 2012(4): 50-52.
[10]刘志康,姚郁.线性鲁棒控制[M].北京:科学出版社,2013: 267-300.
[11]刘复华. 8xc196kx单片机及其应用系统设计[M].北京:清华大学出版社, 2002: 173-213.
[12]谢晗,吴光强,邱绪云. 基于 xPC 目标的实时仿真技术及实现[J]. 微计算机信息, 2006(22): 200-202. XIE Han,Wu Guangqiang,QIU Xuyu. Realtime simulation and realization based on xPC target[J]. Microcomputer Information, 2006(22) : 200-202.
[13]李升波,王建强,李克强. 硬件在环仿真试验台监控系统的设计与开发[J].系统仿真学报,2007, 19(16): 3684-3687. LI Shengbo, WANG Jianqiang, LI Keqiang. Development of real-time monitor system for hardware-in-the-loop simulator[J]. Journal of System Simulation, 2007, 19(16): 3684-3687.
[14]杨正贤,孔宪仁,王继河,等. 基于xPC的小卫星半物理仿真验证平台[J].系统仿真学报, 2009, 21(20): 6444-6448. YANG Zhengxian,KONG Xianren, WANG Jihe, et al. Hardware-in-loop simulation platform for small based on xPC real-time simulator[J]. Satellite Journal of System Simulation, 2009, 21(20): 6444-6448.
[15]蒋疆,罗宏.气制动ABS调节器性能参数测试系统研究与设计[J]. 测控技术, 2012, 31(8): 110-113. JIANG Jiang,LUO Hong. Research and design of test system for the performance parameter of pneumatic braking ABS regulator[J]. Measurement & Control Technology, 2012, 31(8): 110-113.
[16]宋彦龙. 基于xPC电机台架的综合数据采集系统[D]. 长春:吉林大学, 2014:9-10. SONG Yanlong. Integrated data acquisition system based on xPC Motor Jack Horse[D]. Changchun: Jilin University, 2014:9-10.
[17]进兵. 基于 xPC Target 的无人机飞行控制软件快速原型设计[D].南京:南京航空航天大学,2008:12-16. JIN Bing. Rapid prototype design for flight control software of uav based on xPC target[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2008: 12-16.
[18]王超, 王仕成, 刘志国. 基于Matlab/xPC Target的实时仿真系统研究[J]. 控制工程, 2007, 14(S1):165-167. WANG Chao, WANG Shicheng, LIU Zhiguo. Research on real time simulation system based on Matlab xPC target[J]. Control Engineering of China, 2007,14 (S1): 165-167.
[19]杨向忠,安锦文,崔文革. 快速控制原型仿真技术应用[J]. 航天控制, 2009, 27(2): 72-80. YANG Xiangzhong, AN Jinwen, CUI Wenge. The Application on Rapid Control Prototyping Simulation[J].Aerospace Control, 2009, 27(2): 72-80.
[20]聂宇威. 超高空观测平台半实物仿真系统设计与实现[D].哈尔滨: 哈尔滨工业大学, 2011:14-26. NIE Yuwei. Design and implementation of the hardware-in-loop simulation system of a high altitude platform[D]. Harbin: Harbin Institute of Technology, 2011: 14-26.
[21]程夕明,徐梁飞,何彬, 等. 串联混合电动车辆动力系统的实时仿真[J]. 系统仿真学报, 2004, 16(7): 1467 -1471. CHENG Ximing, XU Liangfei, HE Bin, et al. Real time simulation of shev powertrain system[J]. Journal of System Simulation, 2004, 16(7): 1467-1471.
[22]沈刚,丛大成,代小林, 等. 基于重复控制的六自由度转台控制系统[J]. 控制工程, 2009, 16(6): 760-763. SHEN Gang, CONG Dacheng, DAI Xiaolin, et al. Six-DOF turntable control systems based on repetitive control[J]. Control of Engineering of China, 2009, 16(6): 760-763.
[23]陈怀民,赵会超. 基于xPC和CVI的实时仿真系统设计实现[J]. 电子设计工程, 2012, 20(24): 17-20.
CHEN Huaimin, ZHAO Huichao. Design and realization of real-time simulation based on xPC and CVI[J]. Electronic Design Engineering, 2012, 20(24): 17-20.
[24]林晓东. 基于xPC的五自由度气浮平台控制系统设计及仿真研究[D]. 哈尔滨:哈尔滨工业大学, 2013: 7-10. LIN Xiaodong. Design and simulation research on the five degrees-of-freedom air bearing platform control system based on xPC[D]. Harbin: Harbin Institute of Technology, 2013: 7-10.

朱齐丹,男,1963年生,教授,博士生导师,博士,中国自动化学会应用委员会委员、黑龙江省自动化学会理事、国家绕月探测科学应用专家委员会专家、《应用科技》杂志主编,主要研究方向为机器人与智能控制、机器视觉检测技术、先进控制理论及应用和复杂系统分析与决策等。作为项目负责人承担科研项目近30项,获得国家"光华基金奖"一次,中国船舶工业总公司优秀青年科技工作者称号。发表学术论文百余篇,其中被SCI、EI检索60余篇,出版译著1部,获得发明专利6项,软件著作权5项。
陈力恒,男,1989年生,硕士研究生,主要研究方向为先进的控制理论及应用。

卢鸿谦,男,1975年生,副教授,主要研究方向为复杂系统控制及其运动控制。
Research on the active suspension method of the low-gravity simulation system
ZHU Qidan1, CHEN Liheng1, LU Hongqian2
(1. College of Automation, Harbin Engineering University, Harbin 150001, China; 2. Center for Control Theory and Guidance Technology, Harbin Institute of Technology, Harbin 150001, China)
In order to make the design of the low gravity simulating system simpler and make the lunar rover get more accurate test results, the method of controlling the force circuit and the location circuit directly is put forward. In the system model, the delay problem and the parameter uncertainty which may affect the robust stability of the system are considered. For addressing the problem of the interference and the uncertainty in the system, Hcontroller is designed. Experiments showed that the controller can effectively suppress the influence of uncertainty and interference and the control precision of the system is guaranteed.
Hcontroller; robust control; torque motor; low gravity; constant tension; parameter uncertainty; lunar rover; time delay
2013-11-22.
日期:2015-01-13.
国家自然科学基金委创新研究群体科学基金(61021002).
陈力恒.Email:clh114131@gmail.com
10.3969/j.issn.1673-4785.201311036
http://www.cnki.net/kcms/doi/10.3969/j.issn.1673-4785.201311036.html
TP273
A
1673-4785(2015)01-43-08
朱齐丹,陈力恒,卢鸿谦. 低重力模拟系统主动悬吊方式控制研究[J]. 智能系统学报, 2014, 10(1): 43-50.
英文引用格式:ZHU Qidan,CHEN Liheng,LU Hongqian. Research on the active suspension method of the low-gravity simulation system[J]. CAAI Transactions on Intelligent Systems, 2014, 10(1): 43-50.
