高速公路汽车防连环撞预警装置设计
2015-02-10付芳艳张大鹏裴红星
付芳艳, 张大鹏, 裴红星
(1.郑州大学 物理工程学院 河南 郑州 450001;2.河南职业技术学院 信息工程系 河南 郑州 450046)
高速公路汽车防连环撞预警装置设计
付芳艳1, 张大鹏2, 裴红星1
(1.郑州大学 物理工程学院 河南 郑州 450001;2.河南职业技术学院 信息工程系 河南 郑州 450046)
为了预防高速公路连环撞击事件的发生,设计了车载防连环撞预警装置.采用超低功耗MSP430单片机作为CPU控制模块,将剧烈变化的加速度作为事故发生的重要判据.结合GPS接收模块,实时接收全球定位卫星发出的定位信息,计算车辆的准确位置,并进行路段匹配.一次事故发生后,利用无线通信模块实现事故车辆方位信息的传输,判定自身车辆如位于事故车辆同路段后方,则进行预警.实验表明,该装置实现了车辆的事故判断和定位,能够有效防止二次事故的发生.
加速度; 无线定位; 路段匹配; 二次事故; 预警
0 引言
发达国家智能交通系统起步较早,如美国利用信息与通信技术实现汽车与道路设施的集成,并以道路设施为基础,通过车车通信(vehicle to vehicle,简称V2V[1-2])和车路通信(vehicle to roadside,简称V2R)实时获取道路交通状况信息并反馈给出行车辆,达到提高安全和效率的目的,其覆盖率达到80%.日本的智能公路系统smartway提供一个开放共用的基础平台,通过车路合作服务系统并改进道路设施,仅2009-2010年就在全国高速公路上设置了1 600个智能交通系统信息通信单元,负责提供与安全有关的信息、前方道路状况和大范围拥堵信息,集成车载导航系统(VICS)接收交通信息服务中心发布的道路交通事故信息及周围行驶车辆状态信息[3].欧洲easyway项目智能车车和车路合作系统2010年进入测试,可提供全欧(跨地区)的公路协调管理、出行信息服务、道路收费服务,以及其他与生活有关的远程服务.
我国智能交通系统起步较晚,基础设施薄弱,与国外智能化和动态化的交通系统相比,我国智能交通运行效率和管理水平不高,服务内容和手段单一,整体发展水平还比较落后,道路信息监测体系仍处于规划中.
目前,国内外智能交通的发展主要侧重在主动避让方面,也就是利用现有的科学技术手段如超声、微波、激光、红外、GPS等技术,实现车与车、车与障碍物之间距离的实时自动监测.当距离小于设定的安全距离阈值时,发出警报提醒驾驶员注意,从而达到主动避让,降低首次事故发生的可能性.文[4-5]采用激光探测技术测距实现汽车安全报警,可以有效预防追尾碰撞事故发生,提高了汽车的主动安全性能.文[6]设计了一款基于STC89C52的超声波测距防撞系统,对超声波进行温度补偿,有效提高了测距精度,系统性能稳定.
这些研究,无论是通过哪种技术手段,其目的都是通过对距离的判断,提前提醒驾驶员注意,从而降低事故发生的可能.一旦事故已经发生,这样的提醒已经不能够给驾驶员足够的反应时间,尤其是当能见度较低,如夜间或雾霾天气等情况下,更容易造成连环撞车事故.因此急需提出一种能够在能见度较低情况下,有效预防首次事故后二次事故发生的方法.
1 系统功能概述
高速公路防连环撞预警装置采用超低功耗单片机MSP430作为中央处理器,加速度模块实时采集车辆的加速度信息,作为事故发生的主要判据;GPS接收模块能够准确定位车辆的位置,判定当前车辆位于事故车辆同路段后方时,报警电路进行声光报警,提醒驾驶员采取相应措施避免连环撞击事件的发生.
车载防连环撞预警装置的操作分为自动和手动两种模式.自动模式:装置通过检测加速度信息判定车辆发生事故,主动向外发射自身方位信息,例如:位置,24.03495N,110.52093E;手动模式:车辆停滞于高速公路某一路段,按键操作,手动发射自身方位信息.车辆发生事故后持续向外发射自身事故信息,直到事故车辆被处理,可按键操作停止向外发射事故信息.
2 系统硬件设计
车载防连环撞预警装置采用加速度传感器ADXL250和GPS接收模块实时测量和接收车辆的加速度信息和方位信息,通过MSP430F149单片机处理和控制这些信息,车辆间通过无线通信模块YL-500IW进行通信.该系统由加速度模块、GPS接收模块、无线通信模块、电源模块、报警电路、LCD显示电路、存储电路组成,系统结构如图1所示.
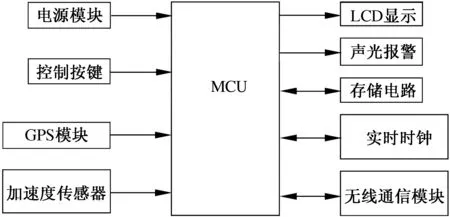
图1 系统结构框图
2.1 CPU控制模块
CPU采用美国TI公司超低功耗l6位单片机MSP 430F149,它具有丰富的内部硬件资源,处理速度快,功耗低,从低功耗模式到唤醒模式的转换时间小于6 μs,符合本装置采用电池长时间供电的需要;体积小,适合在便携式仪器上使用.同时,MSP430F149单片机支持C语言,易于编程.在应用中,MSP430F149不需做过多的扩展,适合要求快速处理的实时系统.MSP430F149的工作电压是3.3 V,其I/O也是3.3 V逻辑电平.MSP430F149有两个串行异步通信口,分别连接GPS模块与无线通信模块.
2.2 加速度传感器模块
通过对加速度传感器的工作原理及应用范围的了解,结合本文所研究的仪器设备,加速度传感器采用AD(analog devices)公司的ADXL250二维数字加速度传感器芯片, 主要用于实时监测车辆的行车加速度.测量范围广,最大量程达+50×9.8 m·s-2.可以通过调节比例系数来调节测量精度.具有片载二维滤波器,平均噪声小,只有9.8 mm·s-2/Hz.
2.3 GPS定位模块
用GPS定位模块确定汽车的位置.将GPS接收机装于汽车内,利用全球定位卫星发送信息,提供经度、纬度、速度及方向等数据信息.通过装在汽车内的GPS接收机,接收到GPS的定位消息,精确测定汽车所在的当前位置[7].
GPS模块HOLUX M-89是一种根据低耗电MediatekGPS解决方案设计的超小型12×12×2.05 mm GPS引擎模组.它对于导航应用提供高达-159 dBm的绝佳灵敏度与快速的第一次定位时间.适用于汽车导航、船只导航、舰队管理、AVL和定位服务、自动导航、个人导航或旅游装置、追踪装置/系统和地图装置应用.M-89可通过第4脚串行数据输入端、第5脚串行数据输出端与MSP430F149的串行通信接口USART0进行数据通信.
2.4 无线收发模块
无线收发模块采用YL-500IW.YL-500IW无线通信模块功率大于500 mW,具有距离远、抗干扰性强、接收灵敏度高的优点.视距可靠传输距离可达3 500 m;采用GFSK的调制方式;收发一体,半双工,数据收发转换自动完成,可用于点对点、点对多点、多点对点等多种通信组合方式;数据透明传输,可传输较长的数据帧;自动过滤掉空中产生的假数据,长期使用可靠性好,故障率极低;能够可靠收发方向信息.
2.5 电源模块
电源模块采用12/5 V双输出锂电池,4 800 mAh大容量电池盒,可长时间供电,且供电稳定,使装置正常运行.电源模块上设有开关,可随时启动和关闭电源.该电源模块在耗完电时还可进行充电,保证装置的持久耐用.
3 系统软件设计
3.1 系统的主要功能
系统的主要功能有:GPS数据采集与处理;车辆加速度的采集与处理;车辆路段匹配;判定事故发生后,则通过无线通信模块将车辆的GPS数据发送给周围的车辆,未发生事故时,继续进行加速度和GPS数据的采集与处理;接收到事故车辆信息的车辆判定自身是否位于事故车辆的路段的后方,位于事故车辆后方时,装置发出报警信号,进行预警,否则,继续进行加速度和GPS数据的采集和处理.
3.2 GPS的软件实现
本系统的GPS的通信接口协议采用美国NMEA (national marine electronics association)0183ASCII码协议,这些数据由帧头、帧尾和帧内的数据构成.帧头不相同时,帧内数据也不相同.系统根据需要只对GPGGA进行处理,通过仔细分析各数据帧的内容,可以得到GPS数据的经纬度信息和时间信息.在解析数据时,需要判别ASCII码的帧头是否是“GPGGA”,若检验无误,则确定本帧数据是可用数据,显示并存储汽车的经纬度信息和时间信息.
如果系统频繁读取GPS数据,会占用大量的CPU时间,而且时间间隔太短的话,这些数据变化不大,不能以轨迹的形式准确地显示车辆的动态.系统默认情况下,设置获取GPS数据的步长为1 s.GPS的数据解析流程图如图2所示.
3.3 路段匹配的软件实现
系统接收到第一个位置信息时并不能绘制轨迹,因为一个像素点不能确定车辆的运动方向和轨迹,超过一个位置信息时就用直线绘制相邻的点,并用最近两个位置点来确定运动方向,运动方向用箭头表示.其中高速公路信息保存在地图信息数据库中,所有车辆的位置信息、轨迹等存入车辆信息数据库.
路段匹配过程如下:将车辆的瞬时位置信息与高速公路信息数据库中的数据进行匹配,判断车辆当前所处的高速路段;比较不同时刻车辆方位信息的变化,可以准确判定车辆的行驶方向;确定车辆位于同一路段,并且同向行驶时,路段前方的车辆发生事故,其后方车辆的车载装置进行预警.
3.4 预警装置的软件实现
首先通过PC机将编译好的程序下载到MSP430单片机中并且运行程序.则GPS工作模块通过UART0将接收到的GPS信息传给MSP430进行处理和存储;加速度模块采集车辆的加速度信息,并通过MSP430内部的AD转换后进行存储.检测到加速度发生剧烈变化后,判定发生事故.无线通信模块将事故车辆GPS信息发送出去;非事故车辆将接收到的GPS信息与自身GPS信息同时进行路段匹配,判断自身车辆位于事故车辆同路段后方行驶时,车载装置进行预警.事故车辆与非事故车辆车载装置流程如图3所示.
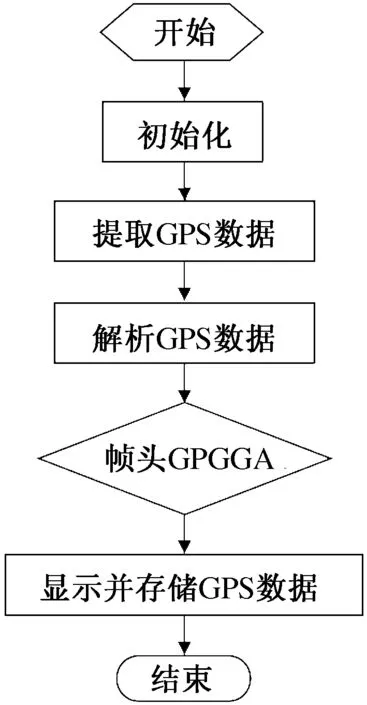
图2 GPS软件流程图

图3 车载装置实现流程图
4 实验分析
完成了车载防连环撞预警装置的平台搭建后,需要对系统的整体和各个模块进行测试.测试主要分为对加速度模块的测试和对GPS数据的准确性测试.
4.1 加速度数据采集与分析
图4,5加速度曲线是根据在模型车进行相关实验获得的部分数据绘制而成.其中设定车辆行驶方向为x轴加速度正向,x轴正向旋转90度方向为y轴加速度正向,采集频率为22 Hz,加速度传感器量程为±5×9.8 m·s-2,因为功率放大器件存在过饱和区间,所以加速度传感器模块在实验中实际量程为±3.6×9.8 m·s-2,分辨率为10×9.8 mm·s-2.

图4 模型车x轴加速度曲线

图5 模型车y轴加速度曲线
分析图4可得,匀加速阶段,x轴加速度基本为正值,且在-0.01×9.8 m·s-2~0.4×9.8 m·s-2之间变化;匀速阶段,x轴加速度基本保持在零度;匀减速阶段,x轴加速度为负值,且在很小的范围内变化,这与理论上的加速度变化规律基本吻合;车辆发生右侧碰撞瞬间,x轴加速度产生了一个-3.52×9.8 m·s-2的突变,速度在短时间内迅速降为0,出现短时间静止状态.
分析图5可得,匀加速、匀速、匀减速阶段y轴加速度均基本保持在0,与理论上y轴加速度变化规律基本吻合.车辆发生右侧碰撞瞬间,车辆向左倾斜,y轴加速度也产生了一个-2.35×9.8 m·s-2的突变.
经过实验测试和数据分析,可以确定车辆的加速度发生较大的突变时,车辆发生事故.

表1 GPS模块开机稳定后的数据Tab.1 GPS data after system stability
4.2 GPS数据采集与分析
(1) 测试GPS模块时,开机看其指示灯是否点亮,点亮即正常工作.GPS开机稳定后的数据如表1所示.
(2) 获取GPS数据的步长为1 s,10时25分40秒至10时25分49秒,10 s时间内A车和B车的GPS数据如表2所示.
第1步: 将表2中A车和B车的GPS数据与地图信息数据库中各高速路段信息进行比对可得,A车、B车同时位于连霍高速河南省路段;
第2步: 计算A车10 s内数据的变化,可知A车沿着连霍高速向东南方向行驶;同理可得B车沿着连霍高速向东南方向行驶;
第3步: 分别比较A车和B车同一时刻的经纬度信息可知A车位于B车东南方向,结合行驶方向可得,A车位于B车行驶路段前方与B车同向行驶;
第4步: 分别计算不同时刻A、B车之间的距离可得,A、B两车之间的距离小于通信模块的有效通信距离3 km;
实验表明,A车发生事故停滞于高速公路上时,A车车载装置发送自身事故信息,B车车载装置收到A车的事故信息并进行预警;而B车发生事故停滞于高速公路上时,A车车载装置接收到B车车载装置发送的事故信息但不会进行预警,实现了装置的既定功能:只有在通信距离范围内,与事故车辆同一路段后方行驶的车载装置才进行预警.

表2 A车和B车10 s内的GPS数据Tab.2 GPS data of A and B cars in 10 s
5 结语
本文设计了基于加速度监测、GPS定位、无线通信的车载防连环撞预警装置,给出了相应的硬件结构和软件流程图,并对车辆进行了大量实验,绘制出了相应的加速度变化曲线,并给出车辆行驶过程中的GPS数据及路段匹配方法.经多次测试表明,该装置性能稳定,能实现高速公路车辆定位、事故判断、防连环撞预警的功能,能有效地预防二次事故的发生,具有广阔的应用前景.
[1] 董红召,陈炜烽,郭明飞,等.基于车路一体化的车辆主动避撞系统关键技术的研究[J].汽车工程,2010,32(11):983-988.
[2] Biswas S,Tatchikou R,Dion F. Vehicle-to-vehicle wireless communication protocols for enhancing highway traffic safety[J]. IEEE Communication Magazine,2006,44(1):28-29.
[3] 王兴举,杨磊,高桂凤.日本VICS及ETC的发展状况与实施效果[J].交通标准化,2010,226(15):65-67.
[4] 贺大松,门延会.一种基于激光测距的汽车安全报警装置研究[J].光机电信息,2010,27(7):45-50.
[5] 贺大松,杨平,门延会.汽车纵向防撞报警系统设计与实例分析[J].传感器与微系统,2010,29(9):80-82.
[6] 郭清.基于STC89C52的超声波测距防撞系统设计[J].仪表技术与传感器,2011(6):74-77.
[7] 刘兴明,包晓光.GPS车载导航定位技术研究[J].测绘工程,2013,22(6):31-34.
(责任编辑:王海科)
Design of Early Warning Devices to Prevent Cars’Serial Bump on Highways
FU Fang-yan1, ZHANG Da-peng2, PEI Hong-xing1
(1.SchoolofPhysicsandEngineering,ZhengzhouUniversity,Zhengzhou450001,China;2.DepartmentofInformationEngineering,HenanPolytechnic,Zhengzhou450046,China)
A design of anti-collision warning device was proposed to prevent the chain collision events. The ultra low power microcontroller MSP430 was used as CPU control module. Mutation of acceleration was seen as the most important judging condition of a traffic accident. When an accident happened, GPS module calculated the accurate location of the accident and sent it out. All vehicles a round the accident vehicle in 3 km would make matching section after receiving accident information. The vehicles would receive alarm if they were behind of the accident vehicle. The experimental results showed that the accident could be identified and located by the device, and the secondary traffic accident on high-way could be prevented effectively.
acceleration; wireless location; section matching; secondary accident; early warning
2014-12-16
付芳艳(1989-),女,河南安阳人,硕士研究生,主要从事测试计量技术及仪器研究,E-mail:1040319796@qq.com;通讯作者:裴红星(1975-),男,河南安阳人,副教授,博士,主要从事传感器技术及计算机应用技术研究,E-mail:phxlee@zzu.edu.cn.
付芳艳,张大鹏,裴红星.高速公路汽车防连环撞预警装置设计[J].郑州大学学报:理学版,2015,47(2):78-82.
TH89
A
1671-6841(2015)02-0078-05
10.3969/j.issn.1671-6841.2015.02.016
