三菱FA产品在曲柄压力机搬运中的应用
2015-02-06深圳壮盈自动化机电设备有限公司张金波
深圳壮盈自动化机电设备有限公司 张金波
三菱FA产品在曲柄压力机搬运中的应用
深圳壮盈自动化机电设备有限公司 张金波
本文介绍了三菱电机的运动控制器、伺服、QPLC、变频在曲柄压力机工件搬运中的应用。
Q172DCPU;QPLC;伺服;变频器
1 引言
某客户主要从事冲压外围送料及矫直设备的制造与加工,设备为非标设备。曲柄压力机是采用曲柄滑块机构作为工作机构的一类锻压机器,这种机构将旋转运动变为往复直线运动,实现各种冲压加工工艺。它是板料冲压生产中的主要设备,可由于冲孔、落料、切边、弯曲和成形等工序。对于冲压生产过程中的送料,过去采用人工送料,具有效率低、不安全等缺点。客户要求设计出高效安全的全自动送料机构,在此背景下,我们给客户提供了三菱电机的运动控制器方案,参与设计出三维立体搬运系统。目前已应用在类似压铸机的工件搬运上,效果良好。
2 系统介绍
本系统为中轴BB盖成型生产线中的搬运,工序涉及多次压铸和切边,采用三维搬运系统后,实现了多工位同步送件取件。具有高效、安全的优点。
2.1 曲柄压力机
曲柄压力机主要结构由曲柄滑块、曲柄轴、连杆、凸模(一次、二次、切边)、离合器等组成,曲柄滑块将旋转运动转换为上下直线往复运动。具体动作为:由电动机通过皮带驱动飞轮,经过齿轮和离合器带动曲柄滑块机构,使滑块和凸模直线下行。锻压工作完成后滑块回程上行,离合器自动脱开,同时曲柄轴上的制动器接通,使滑块停止在上死点附近。采用三维立体搬运系统后,压力机可在下死点和上死点往复直线运动,工件搬运保持与滑块的同步。飞轮电机由变频器驱动,可实现无级调速。相当于手工送料速度的6倍。
2.2 三维搬运系统
主要由上料机、三维(X,Y,Z)平移、夹具、升降搬运结构组成,可同时连续搬运多个工件,以满足不同工序的同时供料,保证工序运作的连续性。上料机由气缸驱动,XYZ搬运结构由三菱伺服驱动,通过Q172DCPU控制与曲柄压力机滑块运动保持同步。三维系统机械结构如图1所示。

图1 三维结构图
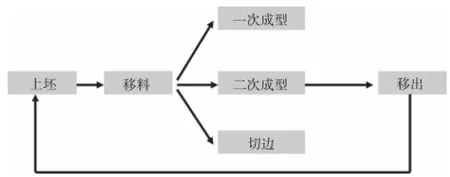
2.3 BB盖成型工序(如图2所示)
3 方案实现
3.1 控制系统
本套系统由QPLC和Q172DCPU实现。滑块运动由变频器调速,滑块电机加装三菱绝对位置同步编码器进行位置速度采样,XYZ搬运轴通过同步编码器做凸轮往复运动与滑块保持同步。滑块到达下死点前,工件搬送到位,滑块离开下死点一段位置,工件开始搬运。
3.2 系统构成(如图3所示)

图3 硬件结构
3.3 系统配置
Q03UDCPU+Q172DCPU+Q61P+Q38DB+QX40-S1+QX42 +QY41P+Q62DAN+QJ71C24N+Q172DEX+Q170ENC+MR-J3-350B*1+HF-SP352*1+MR-J3-200B*2+HF-SP-152B*2+MR-J3-100B*2+HF-SP102*2+FR-A740-11K
3.4 Motion、QPLC多CPU设置
Q系列PLC多CPU系统可共享Q系列PLC的电源模块、基板模块、I/O模块等,可对构成多CPU系统的各台CPU模块进行分散控制,多CPU系统中最多可自由选择4台CPU,多CPU系统中,每个系统最多可控制96个轴,本次用到5个虚拟凸轮。
3.5 Motion CPU端设置
(1)高速刷新设置(如图4所示)

图4 刷新设置
(2)伺服数据设置(如图5所示)
采用绝对位置系统,数据回零方式1。伺服参数可通过MR Configurator 进行在线设置。机械结构采用导程为20mm的丝杆传动。

图5 伺服数据设置
(3)同步编码器设定(如图6所示)
系统使用一个绝对位置同步编码器Q170ENC,分辨率为262144PLS/rev。安装于飞轮上,反馈同步脉冲。

图6 同步编码器设置
3.6 夹具、平移、升降机凸轮曲线(如图7所示)
夹具由2台1kW电机同步驱动,升降机由2台1.5kW带抱闸电机同步驱动,平移由1台3.5kW电机驱动;

图7 凸轮曲线
3.7 虚拟机械程序(如图8所示)
凸轮轴1、2为夹具凸轮,3、4为升降凸轮,5为平移凸轮;凸轮号、行程上限、行程下限通过D寄存器进行指定。凸轮参数设置如图9所示。

图8 机械程序

图9 凸轮参数设置
3.8 顺控CPU端设置
(1)多CPU设置、I/O分配(如图10所示)

图10 多CPU设置、I/O分配
(2)刷新设置(如图11所示)

图11 刷新设置
4 调试中的问题与难点
(1)凸轮曲线的确定
同步编码器Q170ENC的分辨率为262144PLS/rev,滑块的往复直线运动反馈脉冲值为0-262144,对应凸轮周期0~360度。如何确定滑块的0度位置,是构建凸轮曲线的关键。经过多次试验,最终将滑块从上死点往下移动时的位置设为0度位置,下死点位置(成型位置)为180度,从下死点向上返回上死点位置为360度。滑块从0~180度过程中,XYZ搬运结构从取件位置移动到下料位置并完成工件摆放。滑块从180~360度过程中,搬运结构返回取件位置取件。为防止夹具在180度附近与模具碰撞,夹具需提前打开。最后形成凸轮曲线如图7所示。
(2)原点确定
方案采用绝对位置系统,客户要求不使用硬件原点,同时原点位置可随意设置。最终选择Data Set Type 1原点设定方式,通过实模式下JOG程序将伺服移动目标,执行ORG(ZERO)程序,则当前点被设为机械原点位置。
5 系统优点与总结
(1) 控制器与伺服放大器通过光纤轻松连接,简化接线,抗干扰性能更佳、可远距离布线。
(2)使用支持机械的语言可进行简易的可视化编程,通过各种软元件机械模块和凸轮曲线的组合使用,可以实现复杂的同步控制,工件的取放与压机动作完全同步,不受滑块速度及行程影响。
(3)替代人工,高效安全,可适用多种工件搬运,应用于汽车、五金等行业。
[1] MITSUISHI. QCPU/QnACPU编程手册公共指令篇(上下册)[Z].
[2] MITSUISHI. FR-A700-CHT使用手册(详细篇)[Z].
[3] MITSUISHI. 三菱运动控制器 SV13/SV22实模式篇[Z].
[4] MITSUISHI. 三菱运动控制器 SV13/SV22虚模式篇[Z].
[5] MITSUISHI. 三菱运动控制器 用户手册[Z].
[6] MITSUISHI. 三菱运动控制器 SV13/SV22 SFC篇[Z].
Application of Mitsubishi FA Products in the Handling of Crank Press
This paper introduces application of Mitsubishi motion controller, servo, QPLC, inverter in the work piece handling of crank press.
Q172DCPU; QPLC; Servo; Inverter
张金波(1978-),男,湖北人,电气工程师,本科,现就职于深圳市壮盈自动化机电设备有限公司,主要从事自动化产品应用方面的工作。
