三维数字化技术的应用设计研究
2015-01-25万青霖王志超段碧清
万青霖,王志超,段碧清,罗 建,李 翯
(中海油信息科技有限公司 北京分公司,北京100029)
经过三十多年的发展,中国海洋石工业体系已经基本建成,海洋石油的开发工程模式也有了明确的划分,一般分为“全海式开发”和“半海半陆式开发”两种[1]。为了实现“半海半陆式开发”模式,多年来在沿海各地陆续建造了多个原油处理厂,海上开采的原油经海底管线输入陆地终端,经过油水分离加工处理后储存,再定期进行原油外输。陆地终端作为建设数字油田的一个重要组成部分,是实现海洋油气田全生命周期资产完整性管理的必备环节,也是未来实现海上油气田网络化管理、可视化管理、自动化管理乃至智能化管理的重要技术基础。
由于海上油气田一般采用滚动式开发的节奏,陆地终端必然要根据油气田的开发进程进行必要的改建甚至扩建。对于投产时间将近二十年的陆地终端而言,因历经多次的更新改造,终端现状已与原始设计资料出现明显差异,同时因工程设计文件版本次数居多、文件控制工作未能有效执行、资料归档工作还不够完善,导致设计改造资料存放凌乱,资料收集、查阅工作不甚理想[2],仅利用现有收集到的资料、图纸和文件无法完整、准确地对陆地终端原油处理厂实现数字化,只能依靠三维数字化技术对陆地终端工程信息进行逆向恢复。
1 三维数字化技术应用设计研究
目前,三维数字化技术已经成熟应用于基础设施建设、文物和遗产保护、建筑、地质、采矿、工厂、大型装备建造等生产领域[3]。根据不同的行业特点、针对特定的实施场所和测量对象,三维数字化实施内容也会有所侧重,本文将以陆地终端原油处理厂为例,详细介绍具体的实施步骤以及过程控制方法。
1.1 实地勘察、方案设计
陆地终端原油处理厂作为海上原油输入处理的场所,大致可分为厂前区、办公区、生活区、生产区和存储区,其中生产区域设备设施数量最多,又可分为热介质区、污水处理区、电加热脱水区、原油稳定区以及原油计量和外输区。年处理能力为一千万吨的终端处理厂,占地面积约3万平方米。鉴于测量区域面积之大,建筑物之多,设备设施以及管线排列紧密且错综复杂等原因,在实施三维数字化之前需要对其进行实地勘察并制定测量方案。
对终端现场的实地勘察,首先要结合现有资料(包括图纸和文档),分析终端面积尺度、各个生产区域、预计作业周期、生产安全环境等因素,重点对管线弯头区域、管道设备接口处、设备设施密集区域、室内外连接设备、大型生产装置、储罐等工程设施的位置、外形、尺寸进行详细勘察,如果遇见图纸与实际勘察不一致的情况时,应按照实际勘察的结果为准。与此同时还需要与终端作业人员取得联系,详细说明作业内容、作业时间、作业范围,并征得其认可。
三维数字化工作方案设计的重点是确定扫描站点以及标靶的布放位置,科学的设置扫描站点、使扫描仪器在有效范围内发挥其最大功效,可以提高点云数据质量、提升配准精度、减少作业时间、避免重复扫描、保证数字化工作顺利进行。陆地终端由于面积较大,设备和配管较多,对整个陆地终端实施数字化不仅需要建立单个物体的三维模型,还要确定各构筑物、设备设施之间的相对位置关系。为此,综合考虑施工效率和测量精度两方面因素,测量方案需要涉及两个方面的工作,一方面使用三维激光扫描仪对单个生产区域进行推进式扫描,推进过程中注意设备管线情况,对管线交叉、遮挡位置需单独布站扫描,最终对扫描区域形成一个完整的闭环,并确保点云数据对扫描区域全覆盖;另一方面需要用全站仪控制两个扫描区域的配准精度,来保证点云的有效性,两项工作同步进行。具体过程如下:
1)通过实地勘察、熟悉陆地终端处理厂各主要区域、连接通道、标志性构筑物、管线及管廊架走向等实际情况。
2)根据图纸资料结合现场实地勘察情况,大致确定三维激光扫描仪的站点摆放位置。因图纸资料只能反映平面信息,在实际工作中,要根据被测物体的空间立体信息灵活调整或增设扫描站点的位置和数量。
3)根据扫描站点位置确定标靶的位置,利用标靶作为控制被测物体之间相对位置关系的同名点。确保两个扫描站点之间公共标靶的数量保持在3个以上,如精度要求较高可相应增加公共标靶数量和对扫描站点进行相应加密(如图一所示,三角形表示设计的标靶的位置)。
4)不同区域间的拼接一般由全站仪配合完成。方法为:在陆地终端被测区域内布设导线,设定图中M1、M2为已知控制点,测出各导线点的坐标及高程,再由导线点测出图中标靶位置。一般我们只测量4个标靶位置就可以,为保证拼接精度和质量,我们选取1、3、5、9 4个标靶进行测量,选取原则为4个标靶连线能够把扫描区域基本包括。数据为标靶的坐标位置和高程。(如图2所示,黑色圆圈表示导线点)
5)用三维激光扫描仪对被测区域进行激光扫描。
6)在点云中将标靶位置找出,用扫描仪定位并命名,同时将标靶位置和名称绘制在扫描区域草图里,涉及到两个生产区域的连接标靶,要使用全站仪定位,保障配准精度。
7)利用扫描标靶的位置坐标,将激光扫描仪获得的所有单站点云数据进行整体拼接,进而获得整个陆地终端的点云数据。
1.2 站点架设、标靶位置设计
在设计方案确定的扫描站点位置上架设三维激光扫描仪,架设原则是要确保扫描仪器与被测物体之间通视,实现“可见即可扫”。同时也要控制好扫描仪与被测物体之间的距离和角度,根据扫描仪的自身性能和设计参数,进行合理的架设。扫描仪安装固定后,需要将仪器基座调整至水平位置,可以通过基座三点升降调节旋钮进行操作。

图1 扫描标靶位置设计图Fig.1 Target location which used for scanning

图2 导线点、控制点位置设计图Fig.2 The location of guide line points and control points
扫描标靶作为一种特殊的标记,能够被扫描仪器识别,并被记录下空间坐标值。标靶种类一般可分为黑白标靶、球形标靶和圆形标靶。扫描站点位置确定了扫描标靶的位置,标靶应该放置在两个相邻站点之间的重叠区域内,重叠区域应布置3个或以上数量的标靶,标靶相互之间的空间位置关系应避免处在条直线上,如需要布设第四或第五个标靶,则其位置应尽可能远离三角平面的法线方向。标靶平面应与现站点仪器的激光光源方向保持基本垂直,标靶位置还应同时满足现站点和下一站点的通视。
1.3 扫描作业过程设置
三维激光扫描仪目前大致可分为两种工作模式,一种是连机扫描、一种是脱机扫描,两种工作模式各具优势。随着扫描技术的进步,目前使用较为普及的主流机型如徕卡C10地面扫描仪,此仪器即可实现脱机扫描,又能支持连机扫描,能够适用于不同的扫描环境和技术要求,很大程度的提高了现场扫描的工作效率。在实际扫描工作中,如果环境条件允许,建议采用连机扫描的方式,以实现对扫描数据的实时拼接配准和过程质量控制。
三维激光扫描仪与计算机通过局域网线连接,手动设置IP地址构建扫描仪与计算机之间局域网络环境。利用cyclone软件设置添加数据库,确定数据最后存储的位置,并建立project名称(如图3所示)。通过扫描软件连接并控制激光扫描仪,在软件设置功能模块,设置扫描范围、扫描点云间隔密度、扫描在水平和垂直方向的点数等参数 (如图4所示),设置完毕开始进行激光扫描工作。单个站扫描工作完成后,应检查获取的点云情况,如发现局域点云扫描缺失,应在站点原位重新扫描,直至获得符合技术要求的点云数据。同时在作业过程中,还要做好换站工作,换站前应先关机,并断开局域网连接线,新站点的架设方法与扫描操作与前站相同。此外,对现场的作业布局也要做好记录,例如场地平面布置简略图、站点名、站点位置及数量、标靶名、标靶位置及数量等信息都需要准确记录。

图3 设置扫描项目Fig.3 Setting scanning project

图4 设置扫描参数Fig.4 Setting scanning parameters
现场拍摄作为扫描作业的辅助手段,与扫描作业同步进行。因陆地终端原油处理厂设备设施种类繁多、管线与构筑物相互穿插、结构复杂,部分区域人员设备无法穿越,也有的区域因存在风险隐患无法在预设位置架设扫描站,因此必须结合使用影像的方式对三维扫描信息缺失的部分进行补充。对于终端现场和设备设施应采用多角度进行拍摄,按照观察的先后次序,将设施及其管线的进出走向表现出来。并且按照场景、设施的分类,正确的建立影像文件目录,做到层次分明、便于查阅和检索。影像分辨率不应低于1 000万像素、建议使用较大的景深,不宜使用机内闪光灯,文件格式最终以JPEG提交。
1.4 配准计算、质量控制
使用连机扫描工作模式具有独特的自身优势,在设备多管线密集的情况下,可以用扫描软件在计算机中观察点云,直接找到标靶位置,并用扫描仪定位。而标靶的位置也可以放到距扫描仪较远且标靶位置摆放需要精准的位置,同时在扫描单站完成后可以在现场立即进行拼接计算,避免现场其他施工人员误动标靶,导致标靶失效问题[4]。通过扫描期间对单站或正在进行的扫描结果进行直观的检查,判断点云质量是否满足后续处理(如量测、建模、计算)的要求。同时还能够实现对扫描数据的实时配准,检查并控制扫描误差,在作业过程中贯穿执行质量控制。
在站点配准计算中,根据《石油化工生产设施逆向工程三维激光扫描作业规范》的要求,应将站点之间有效同名点配准误差控制在5 mm之内(如图5所示),对于配准超过5 mm误差的有效同名点可以通过降低其的配准权重,或在保障两个站点配准至少拥有3个有效同名点的情况下,删除第4或第5个误差较大的有效同名点。如果发现配准误差过大,超过可控范围,则需要进行原因分析,找出导致误差产生的因素,发现问题及时整改。采取适当的补救措施,在原扫描站点进行重新扫描,或者调整原扫描站点布置方案、添加增设新的扫描站点,直至将误差控制在5 mm之内。通过上述控制措施,在作业现场进行扫描数据的实时配准,有效地加强了对扫描数据精度和质量的控制,在整体上提高了陆地终端数字化工作的准确性。

图5 配准误差计算统计Fig.5 Calculation of registration error
2 三维数字化成果与建模技术应用设计研究
三维数字化技术获取的成果主要以点云数据文件的形式存放,需要用专用软件来读取、运行和处理,在石油化工领域主要使用cyclone软件对点云数据进行编辑。获取陆地终端完整的点云数据,意味着三维数字化工作完成了一个阶段,下一步就是利用点云数据对缺失的工程信息进行逆向恢复。
目前在工业设计中,三维建模技术主要使用PDMS、PDS、SPF、AUTOCAD、Smart 3D 等工程设计软件[5]。 在陆地终端数字化工作中,需要涉及多专业、多软件、多工具联合使用。一般工作流程是先利用三位建模技术根据现有的工程资料,包括设计文件、设计图纸、P&ID图等进行正向建模,形成基于图纸资料的正向模型。因前文所述图纸资料缺失、不全等原因,正向模型会与陆地终端实际状况存在较大的差异。此时,需要在三维建摸工程软件中导入三维扫描的成果即点云数据,将正向模型与逆向点云数据进行模型比对。如果点云数据模型与正向模型空间位置、尺寸相符合,则直接保留正向模型;如果正向模型与点云数据比对时出现较大差异,比如正向模型中有此设备装置但点云数据中没有,或者某设备装置在点云数据中存在但正向模型中无此设备。对此情况,则需要完全清除差异部分的正向模型,根据获得点云数据和现场差异处照片进行逆向建模,恢复工程信息[6]。通过正逆向建模相结合的方式,完成整个陆地终端的三维工程模型。
在正逆向结合建模过程中,最初也最为重要的一个环节就是找准正向模型与点云数据模型的匹配坐标点。通过共同的坐标点来实现正向模型与点云数据处于同一坐标系统内。具体操作过程如下:
1)在正向模型中先选取一个参照物,参照物的选取原则:一般选取正向建模模型和点云中共有的设备,该设备在坐标系统中有明确的位置,即X、Y、Z方向的坐标都应较为明确和准确。该设备最好是垂直地面的大型柱型设备,可以是大型设备设施也可以是标志性构筑物。
2)提取正向模型参照物的中心点或者主结构交叉点的坐标值,记录并保存为预设坐标值。
3)在点云数据模型中,找到与正向模型相同的参照物,本文以陆地终端储罐设施为例进行说明(如图6所示)。

图6 储罐点云数据Fig.6 Point cloud data of storage tanks
4)利用cyclone软件对储罐点云数据进行编辑处理,先生成储罐的实物模型,再利用测量工具捕捉到储罐模型的中心点。
5)在cyclone软件中,将储罐中心点的坐标值重新定义为正向模型中该设备中心点的坐标值,完成坐标点的设置,另存点云数据文件(如图7所示)。
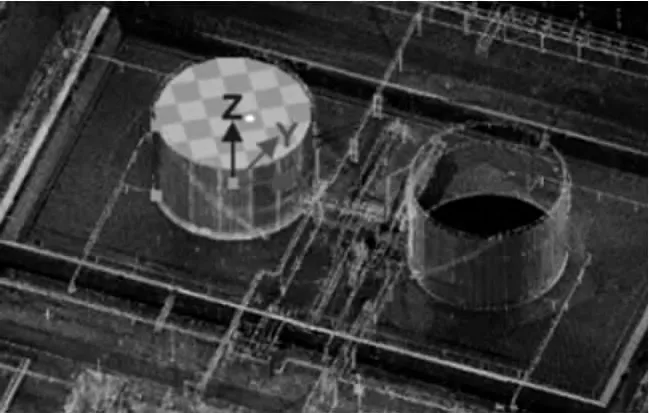
图7 完成坐标设置的点云数据Fig.7 Point cloud which coordinate setting has been completed
6)在三维建模软件中,导入设定好坐标值的点云数据文件,完成正向模型与点云数据模型的匹配。
为了确保三维建模软件能够识别导入的点云数据文件,需要在软件中安装必要的插件,针对不同的工程软件,插件也有所不同,如果使用Smart 3D软件进行建模则需要安装CADWorx插件。完成上述工序后,则可以在三维建模软件中实现正向模型与点云数据的匹配融合,进而开展后续的逆向建模工作,最终形成陆地终端原油处理厂全部设备设施、厂房构筑物、原油储罐、管线管道的三维工程模型,为实现数字工厂提供基础平台。
3 结论
本文主要内容来自于对陆地终端原油处理厂实施三维数字化工作以及多年从事数字化工作的切实经历,事实证明将三维数字化技术应用于陆地终端可以有效的促进实现其建成“数字工厂”的目标,成为其工程信息恢复的不可缺少的技术手段。特别是实现了三维数字成果与三维建模软件的有效结合及应用后,更是拓展了对陆地终端实施数字化的路径,加快了数字化工作的步伐。在今后全球数字化浪潮的趋势下,从传统的机械行业到新兴的信息时代,许多领域都出现了对“实物数字化”技术的强烈需求,三维数字化技术也必然将在这种大的环境背景下,具有更为广阔的应用前景。
[1]罗建,刘耀华,兰志刚,等.三维激光扫描技术在海洋工程中的应用[J].中国造船,2011,52(增刊2):367-376.LUO Jian,LIU Yao-hua,LAN Zhi-gang,et al.Application of three-dimensional laser scanning technology in offshore oil engineering[J].Shipbuilding of China,2011,52(Supplement 2):367-376.
[2]罗建,刘耀华,王在峰,等.石油石化生产设施逆向工程信息数字化技术应用实践[J].中国海上油气,2013,25(4):77-80.LUO Jian,LIU Yao-hua,WANG Zai-feng,et al.Practice of reverse engineering information digitization in the field of petro-chemical production facility:a case study of recovering engineering information of the SZ36-1 Jplatform[J].China Offshore Oil and Gas,2013,25(4):77-80.
[3]白启鹏,孙德鸿,张锐,等.3D GIS在数字化海上钻井平台中的应用研究[J].测绘通报,2011(6):73-75.BAI Qi-peng,SUN De-hong,ZHANG Rui,et al.Research and application of 3D GIS in digital offshore oil platform[J].Bulletin of Surveying and Mapping,2011(6):73-75.
[4]戴升山,李田凤.地面三维激光扫描技术的发展与应用前景[J].现代测绘,2009,32(4):11-12.DAI Sheng-shan,LI Tian-feng.The development and application prospectsof ground three-dementional laser scan technology[J].Modern Surveyingand Mapping,2009,32(4):11-12.
[5]金晓剑,赵英年,李健民,等.海洋石油工程领域“十一五”技术创新成果及“十二五”展望[J].中国海上油气,2011,23(5):285-292.JIN Xiao-jian,ZHAO Ying-nian,LI Jian-min,et al.Technology innovation achievements of the eleventh five year plan and prospect of the twelfth five year plan in offshore oil engineering field[J].China Offshore Oil and Gas,2011,23(5):285-292.
[6]王文标,吴德烽,马孜,等.新型三维激光扫描系统曲面重构技术[J].红外与激光工程,2011,40(5):161-164.WANG Wen-biao,WU De-feng,MA Zi,et al.Surface reconstruction techniques for a novel 3D laser scanning system[J].Infrared and Laser Engineering,2011,40(5):161-164.