新型饲料粉碎机数值模拟,其粉碎室的MRF和动网格UDF计算比较
2015-01-21汪建新曹丽英
■曹 媛 汪建新 曹丽英
(1.包头轻工职业技术学校,内蒙古包头 014010;2.内蒙古科技大学机械工程学院,内蒙古包头 014010)
目前市场上的锤片式饲料粉碎机的工作原理是:饲料经旋转的锤片敲击粉碎后,物料在离心力的作用下,于包裹在锤片外侧的筛网上透筛分离出粉碎腔。粉碎机筛片包在锤片组周围,物料在筛片内侧随着锤片组高速旋转形成物料环流层,由于负压的作用,致使符合粒度要求的部分物料颗粒无法从筛孔透筛,未能透过筛片的物料被多次粉碎,致使物料温升大于合理值、过度粉碎等问题。
新型锤片式饲料粉碎机,在粉碎室内不安装筛网,而是于粉碎室外部另安装了筛分装置,新型粉碎机粉碎过程中,粉碎机高速旋转,锤片敲击物料进行粉碎,物料由于敲击过后产生的动能和粉碎室内气流场压力的双重作用,将物料带入分离装置;分离装置的顶端安装了筛片和回料管,将达到粒度要求的物料分离透筛,不符合粒度要求的物料被回料管吸回粉碎室内再粉碎,达到循环粉碎的功效。
1 新型饲料粉碎机结构
本文选取粉碎机粉碎室内部空间作为计算区域进行模拟,利用Pro/E建立粉碎机粉碎室内空间的三维模型。

图1 新型锤片式饲料粉碎机样机
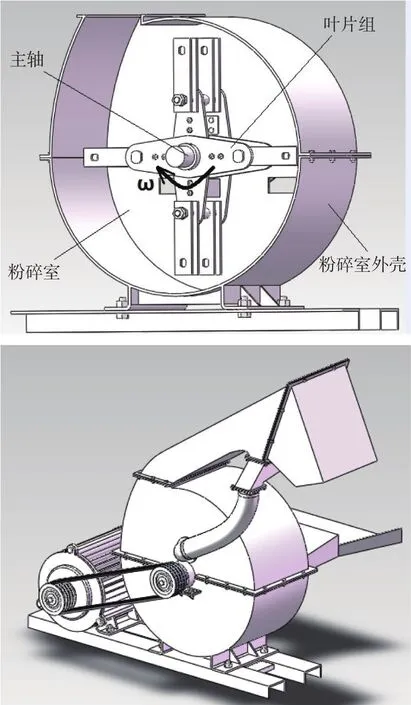
图2 新型锤片式饲料粉碎机模型
在建立三维模型时,对于粉碎机结构做了部分的简化:
①去除分离装置和回料管,仅建立粉碎机的中心粉碎区域。本课题只研究粉碎机中心粉碎区域的流场特性,不需要加入分离装置和回料管,只要在有限元分析时设置好边界条件即可。
②将粉碎室视为完全密封的区域,省略所有小缝隙和倒角,简化流道模型的复杂程度。粉碎室内部本身存在很多缝隙和倒角,但是对于内部的负压特性影响较小,所以省略;简化粉碎机入料口的形状,由两个矩形简化为一个矩形,面积相等。简化进料口形状是为了使后期划分网格和分析的速度加快。
③轴和锤片组作为整体,省略各个结构间的连接。粉碎机工作平稳时,锤片由于离心力的作用,会沿着径向方向展开,所以可以省略之间的铰链连接;而且锤片与连接板、连接板和轴之间的小缝隙并不影响流场的负压大小,所以可以直接将轴和锤片组建立为一个体。
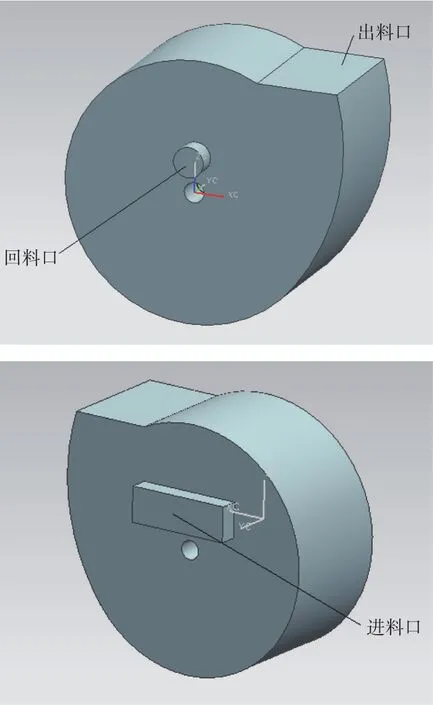
图3 粉碎室简化后结构
2 粉碎室流场计算
在FLUENT计算过程中涉及的主要物理方程包括质量守恒和动量守恒方程,当系统中涉及到能量传递时,还需要使用能量守恒方程。本文在饲料粉碎机粉碎室的流场计算中主要使用了质量守恒方程和动量守恒方程,其中质量守恒如公式(1)所示:

∂该方程是质量守恒的总的形式,可以适合可压和不可压流动。源项Sm是稀疏相增加到连续相中的质量,或者用户自定义的质量源项。惯性坐标系下,i方向的动量守恒方程为:

式中,p是静压;τij是应力张量,其表达式如公式(3)所示:

其中 ρgi,Fi分别是重力体积力和其它体积力,如源于两相之间的作用,Fi还可以包括其它模型源项或者用户自定义源项。
3 MRF单相流数值模拟
3.1 基于Gambit的网格划分
建立网格模型时,利用平面和曲面将流域模型分割成4个部分:锤片部分、外围部分、进料部分和出料部分,由这4个部分构成动、静两个区域。网格模型总单元数达1086520个,生成的网格模型如图4所示。
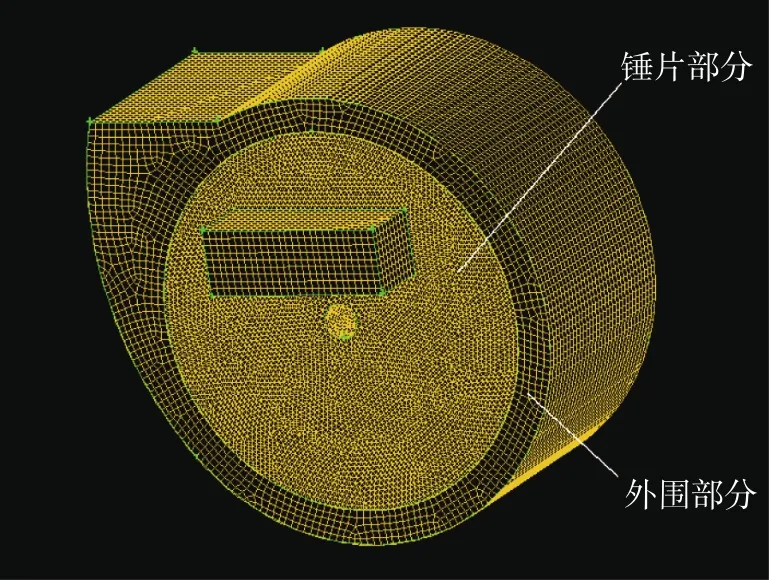
图4 网格模型
3.2 设定边界条件
首先,指定边界类型,网格模型共有6个边界条件需要设定,如表1所示。

表1 边界类型
然后,指定连续介质类型,网格模型分为两部分:转动部分、静止部分,Volume 2为转动部分,Volume 1、4、5分别为外围部分,进料部分,回料部分如表2所示。

表2 连续介质类型
转动部分与静止部分之间通过内、外接触面连接,内接触面属于转动部分,外接触面属于静止部分。内、外接触面在分析过程中非常重要,是MRF模型必须要有的部分,有了接触面才能设定相对转动。
3.3 负压特性
不同转速下粉碎机粉碎室内负压特性,根据模拟结果,粉碎室内负压特性如下所示:
①粉碎机转速2 500 r/min时,粉碎室内截面负压特性如图5所示。
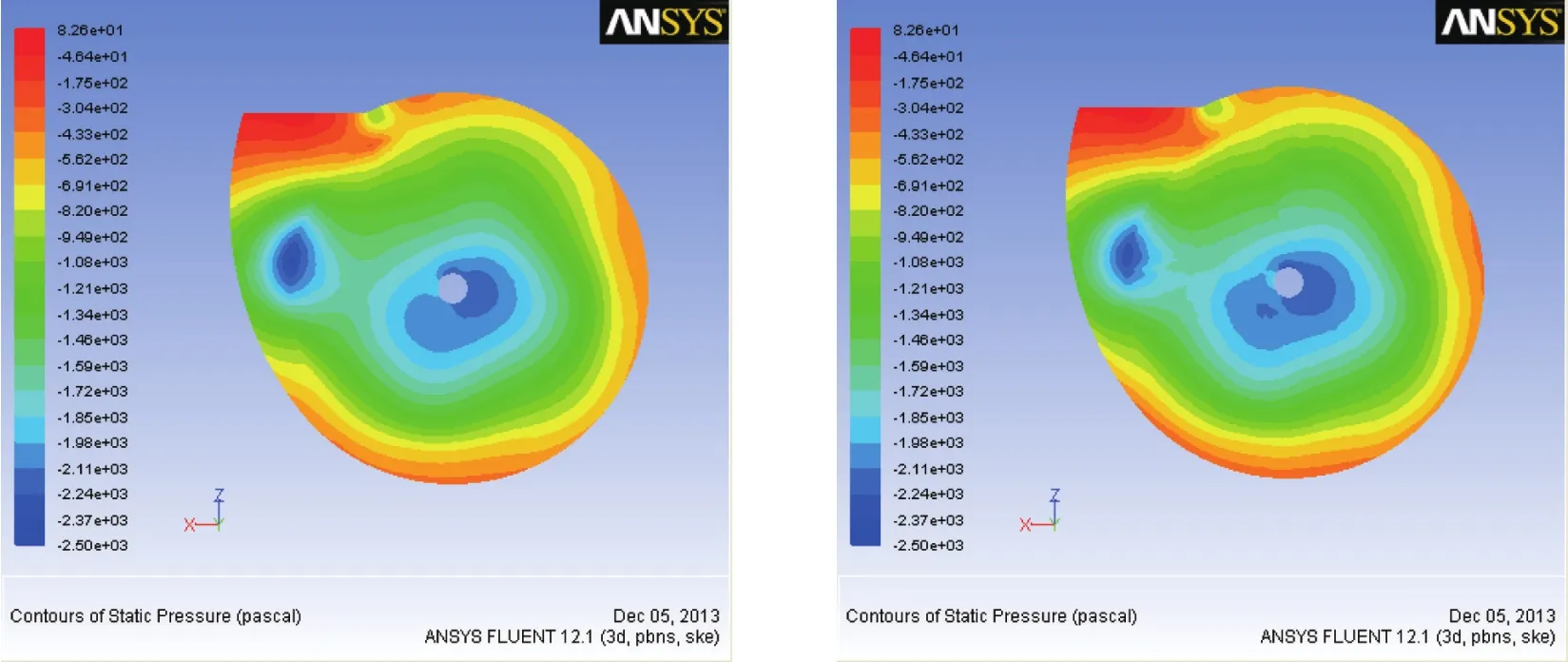
图5 转速2 500 r/min时截面压力云图
②粉碎机转速3 000 r/min时,粉碎室内截面负压特性如图6所示。
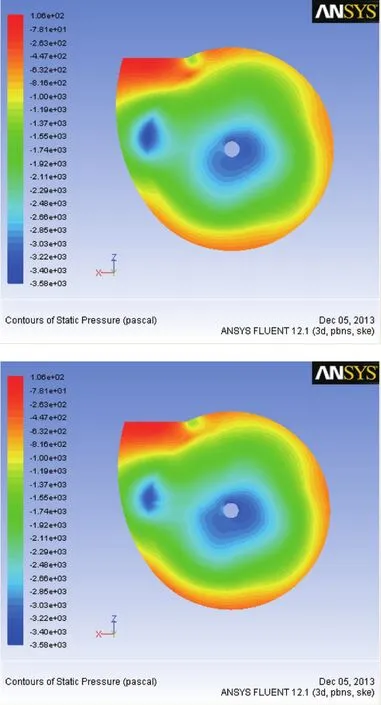
图6 转速3 000 r/min时截面压力云图

表3 最大负压值
3.4 负压分析
①负压的最大值随着粉碎机转速的增大而升高。在径向方向,负压值向外围逐渐减小,在轴向方向,负压值变化很小;
②转速每增大500 r/min,负压值升高1.2 kPa左右;
③负压不仅集中在转轴附近,在出料口以下110 mm处也有小范围的负压集中区域,大小不低于中心负压的大小。
4 基于UDF动网格气固两相流数值模拟
4.1 饲料粉碎机的网格模型
将建立的几何模型导入到Gambit软件中,对模型进行网格划分,分为4个部分,锤片组部分,外围部分,进料口部分,回料口部分,得到的网格如图7所示。转动部分和外围部分属于两个独立的体,之间的区域是气体和固体区域,不需要做interface面,采用UDF动网格的方法对饲料粉碎机锥片的运动以及粉碎室内流场进行仿真模拟,动网格采用可以更新的网格,因此采用四面体网格形式,网格划分总数为80万。
派遣教师参加各种研讨会或赴企业顶岗实习,通过交流学习和操作训练,掌握跨境电商的操作技巧。师资队伍建设是专业建设的核心,合格优秀的师资队伍是保障专业快速发展的基础。
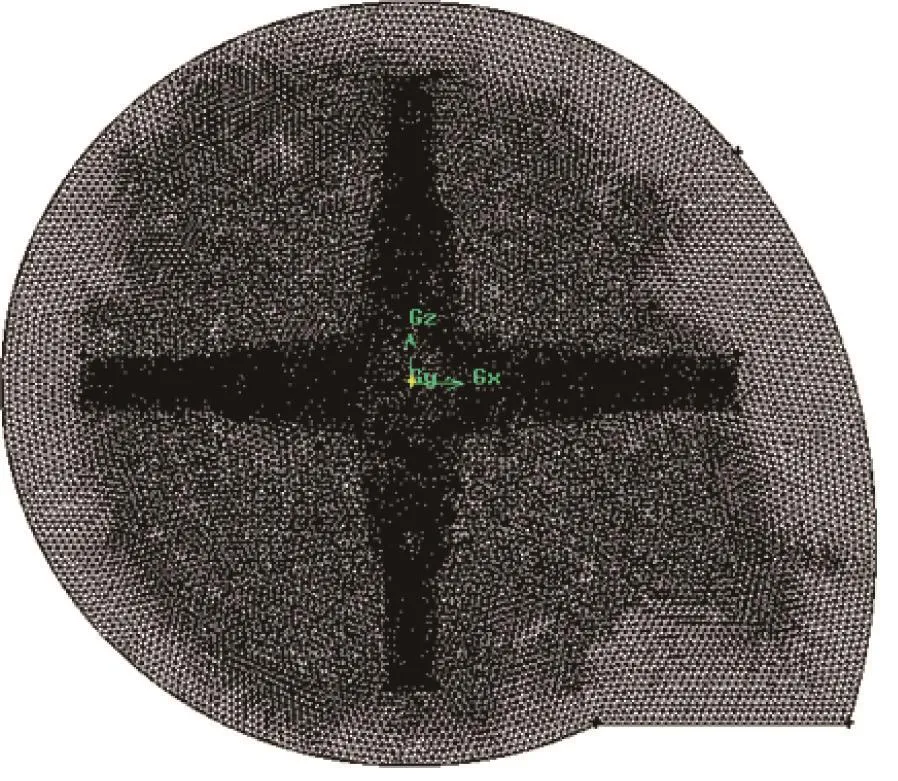
图7 Gambit划分网格
由表4可知,Volume 2为锤片部分,Volume 1、4、5为转动部分、静止部分,Volume 2为转动部分,Volume 1、4、5分别为外围部分,进料部分,回料部分,不需要设置内外接触面,和实际情况相符合。

表4 连续介质类型
4.2 控制方程参数的设置
此项设置的参数对于求解结果的收敛性极为重要,设置的数值过高会导致求解难以收敛,过低难以保证求解精度,同时要选择合适的离散方程。通过对收敛曲线的分析,最终选取欠松弛因子(如表5所示),边界条件如表6所示。

表5 松弛因子设置
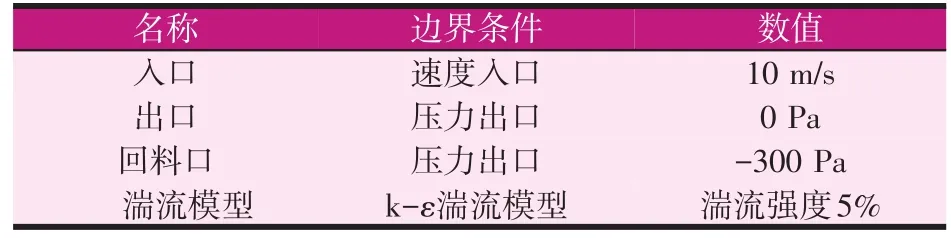
表6 边界条件的设置
打开FLUENT模块,为了模拟的真实性,必须考虑系统的重力,在Y轴方向输入-9.8,因为,初次从粉碎室出来的物料颗粒较大,不能忽略重力对它产生的影响。设置物料分离装置入口处为速度入口,在前人的研究基础上可知物料的最小悬浮速度为8 m/s,所以本次模拟假定气流的入口速为10 m/s,玉米的体积百分数为5%;设置出口为自由出口。湍流强度的设置非常重要,会影响计算结果的精度,经过计算本模拟的湍流强度设置为3.67%。
4.3 UDF动网格编程
锥片的运动采用UDF编程的方式进行控制,运动后的网格采用自动更新的形式,UDF主要编程如下:

4.4 负压特性
①粉碎机转速2 500 r/min时,粉碎室内截面负压特性如图8所示。
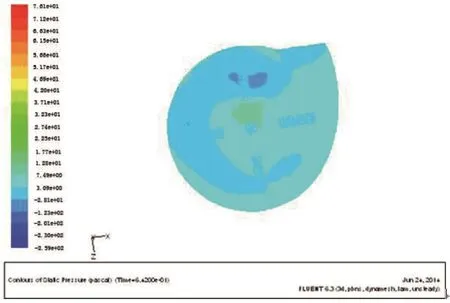
图8 2 500 r/min负压特性
②粉碎机转速3 000 r/min时,粉碎室内截面负压特性如图9所示。

图9 3 000 r/min负压特性

表7 最大负压值
负压分析:负压的最大值随着粉碎机转速的增大而升高,在粉碎机径向方向,负压值向外围逐渐减小,在轴向方向,负压值的变化很小;负压不一定集中在中心转轴附近,在出料口附近也有负压的出现。
5 结论
5.1 利用MRF需要在转动部分和固定的外围部分建立内外接触面连接,而使用UDF动网格则不需要建立,只需要设置锤片为固体,外围壳体和锤片之间设置为流体区域,其和我们实际情况对转动的认识是一致,特别是计算复杂运动状况的运动边界时,动网格有着独特的优势。
5.2 比较单相流和双相流对粉碎室的模拟结果,MRF是一种定常求解方法,UDF是时间作为变量的动网格计算方式,其中利用MRF计算的稳定性,速度优于利用UDF计算的结果,动网格是一种自定义的函数,其计算的结果接近事实,但在运算的时间上是MRF的9~10倍。
