基于数理统计的平行度测量方法
2015-01-17叶剑锋
张 炜,叶剑锋
(中国人民解放军91550部队 辽宁 大连 116023)
光学经纬仪的可见光相机与红外相机成为经纬仪的主要图像传感器,数字图像成为光学经纬仪的信息载体。红外相机的成功应用,弥补了光学经纬仪受天气影响的不足,使得光学经纬仪在目标的起飞段和再入段测量中占测控设备主导地位[1]。
光学经纬仪均采用可见光相机和红外相机两套光路,且可见光相机与红外相机采用同一角度编码器,记录飞行目标的轨迹信息。光学经纬仪的红外相机和可见光相机的光路在机械结构上采用刚性连接,成为一个统一的联动体,但可见光相机主光轴和红外相机主光轴在机械加工制造上不能做到平行,在方位和俯仰上有一定的偏差,给红外数据处理带入一定的困难[2]。
在测站坐标系下,将可见光相机主光轴和红外相机主光轴投影到水平面上,红外相机主光轴在水平面上的投影与可见光相机主光轴在水平面上的投影偏差一定的角度,称之为水平平行度;将可见光相机主光轴和红外相机主光轴投影到垂直面上,红外相机主光轴在垂直面上的投影与可见光相机主光轴在垂直面上的投影偏差一定的角度,称之为垂直平行度。
在内场,针对两个轴间距小于0.5 m的光学经纬仪,光轴平行度的检测方法采用平行光管,平行光管的有效口径可以覆盖两个光学系统,通过对光学系统的光轴平行性进行精密检测装调,使光轴的平行性误差控制在测量精度允许的范围内,同时完成平行性测量;针对两个轴间距大于0.5 m的光学经纬仪,采用基于五棱镜的平行度测试仪,完成两个光轴平行性测量[3]。
在野外站点,光学经纬仪已经使用一年以上甚至更久,由于不具备内场装调时平行度测量条件,如果仍然采用内场装调时测量的平行度,影响交会弹道的测量精度。通常采用拍星的方法来完成平行度测量:把无穷远处的星体看做光源,认为星体发出的光为平行光,光学经纬仪两套光路测量值的差值即为平行度[4-6]。
由于校飞飞机距离测站的距离多在5 km以上,因此可以把校飞飞机上的光源为测量源。针对外场光学经纬仪的平行度测量,从事后数据处理的角度出发,采用用光学经纬仪两套光路测量校飞飞机光源,把测量值的差值作为平行度的采样样本,采用统计学的方法,统计计算单次的平行度,再把单次的平行度作为采样样本,统计计算结果作为光学经纬仪的平行度。此种测量方法,只需对测量数据进行三差修正,无需其他。
基于统计学的平行度测量方法,通过可见光光路测量数据与红外光路的测量数据差值,不但检验测站坐标系下测元数据,而且为光学经纬仪平行度测量提供采样样本,通过多站的统计计算平行度,填补了外场平行度测量的空白,保证了光学经纬仪测量数据交会弹道的精度,为光学经纬仪红外测量数据的误差分析提供参考依据,丰富了光测事后数据处理方法。
1 数据预处理
1.1 视频判读
目标飞行过程中,光学经纬仪通过可见光光路和红外光路拍摄飞行目标,形成不同的数字图像,数字图像中包含目标的脱靶量信息,拍摄时通过编码器记录主光轴的角度信息,事后判读处理,完成数字图像中目标脱靶量测量,结合当前帧图像的编码器信息,合成测站坐标系下的测元。
针对光学经纬仪拍摄的同一目标,要求视频判读部位一致,只有这样,才能计算测站坐标下的可见与红外测元的差值,完成平行度的统计计算。
1.2 系统误差修正
由于光学经纬仪测角信息具有系统误差,为此需要进行系统误差修正。系统误差修正采用公式(1)和公式(2)[7]。

式中,A为测站下修正系统误差后的方位角,Ap图像判读后的方位角,ΔAop为方位角的定向差,c为照准差,E为测站下修正系统误差后的高低角,Ep图像判读后的高低角,ΔEop为高低角的零位差。
2 单站单次平行度统计计算
2.1 原 理
在测站坐标系下,光学经纬仪的可见光测元数据方位角A和高低角E用式(1)表示,红外测元数据A和E用式(2)表示,方位角A差值ΔAj用式(3)计算,俯仰角E差值ΔEj用式(4)计算。

由于光学经纬仪的可见光光路的测角数据与红外光路的测角数据,相互独立,因此统计计算单站单次可见光与红外测元的差值,采用差值的均值作为本次测量的平行度,如式(5)式(6)所示,采用差值的均方根值作为测量误差,如式(7)式(8)所示。

2.2 单站单次平行度统计计算
表1中统计计算数据可以看出,1#设备的方位角A的第一次的数值偏大,第二次和第三第的数据趋于一致。分析原因:检查了光学经纬仪的测站坐标系下的测元数据,无一差错,经光学经纬仪管理操作人员沟通,确定第一次实验后装备状态调整,造成第一次数值比较第二、第三次偏大。1#设备的方位角A的第一次的数值作为异常数据,抛弃不用。1#设备的俯仰角E第二、三次实验数据趋于均衡一致,但统计计算数据的误差最大约3 s,后续需要慎重使用。2#设备方位角A、俯仰角E的统计计算平行度数据均趋于一致,误差满足小于2 s的要求,在后续的数据处理中可以安全使用。

表1 校飞平行度统计测量数据及误差Tab.1 The parallelism measurement data and the deviation of the accuracy calibration flight
3 同站多次平行度统计计算
3.1 原 理
同站多次测元比对误差统计,定义i=1,2,…Ki测量次数,j=1,2,…ni为i次测量采样数,则同站各航次平行度统计计算采用式(12)(13),其中,mT(SA)、mT(SE)为单站单次测量的平行度,mT(A)、mT(E)为站多次测量的统计平行度,各航次统计平行度的测量误差采用(14)(15)统计计算,各航次系统误差采用式(16)(17)计算,其中,mR(A)、mR(E)为单站单次测量的平行度误差。

3.2 同站多次平行度统计计算
同站多次平行度统计计算数据及误差,如表2所示。通过可见与红外数据差值的稳定性,确认光学经纬仪的状态,通过加权的统计计算,计算的平行度数据体现了光学经纬仪的阶段性的状态,为后续红外数据处理奠定了基础。
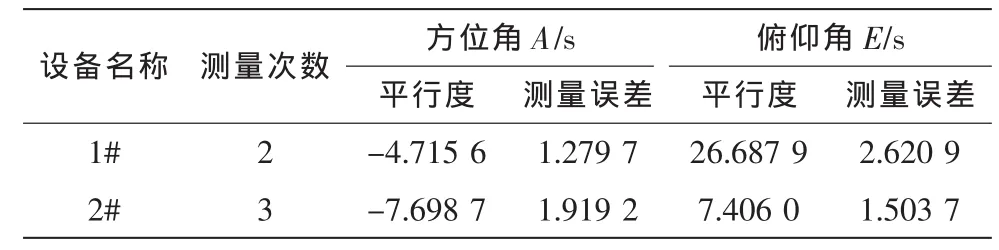
表2 同站多次平行度统计数据及误差Tab.2 The multiple statistical parallelism measurement data and the deviation of the accuracy of the same station
4 结 论
统计计算的平行度,忽略了不同光路拍摄目标对成像的影响,经计算,最大误差约3 s,未满足光学经纬仪内场标定平行度误差小于2 s要求,但经过后续试计算处理,能够满足红外光路的目标轨迹交会的精度要求。采用统计计算光学经纬仪的外场平行度的方法,弥补的外场平行度测量的空白,为红外数据目标轨迹交会提供有力的保证。
[1]何照才,胡保安.光学测量系统[M].北京:国防工业出版社,2002.
[2]牟志华,魏超,刘春光.经纬仪红外基准点误差修正及分析[J].弹箭与制导学报,2010,30(3):236-238.MU Zhi-hua,WEI Chao,LIU Chun-guang.Error correction and analysis of infrared datum mark for cortain type theodolite[J].Journal of Projectiles,Rockets,Missiles and Guidance,2010,30(3):236-238.
[3]谭振江,李政,曹丽华,等.多传感器信息融合技术在光电经纬仪系统中的应用研究 [J].计算机科学,2002,29(11):160-162.TAN Zhen-jiang,LI Zheng,CAO Li-hua,et al.Study and applocation of multi-sensor data fusion in optical-electronic theodolite[J].Computer Science,2002,29(11):160-162.
[4]郭同健,高慧斌,张淑梅.多传感器数据融合在光电经纬仪目标分离跟踪的应用研究 [J].飞行器测控学报,2010,29(5):34-37.GUO Tong-jian,GAO Hui-bin,ZHANG Shu-mei.Application of multi-sensor data fusion technology in tracking of target separation with electro-optical theodolites[J].Journal of Spacecraft TT&CTechnology,2010,29(5):34-37.
[5]张立颖,刘德尚,王文革.平行度检测仪的设计方法[J].长春理工大学学报,2005,28(4):33-35.ZHANG Li-ying,LIU De-shang,WANG Wen-ge.Design of thelightparallelismdetector[J].Journal of Changchun University of Science and Technology,2005,28(4):33-35.
[6]贺和好,叶露,周兴义,等.平行度测试仪原理及其测量精度分析[J].光电工程,2007,34(5):52-56.HE He-hao,YE Lu,ZHOU Xing-yi,et al.Theory and precision analysis of testing apparatus of parallel depth[J].Opto-Electronic Engineering,2007,34(5):52-56.
[7]刘利生.外测数据事后处理[M].北京:国防工业出版社,2000.
