基于神经网络优化的鲁棒模型预测控制
2015-01-15崔宝同楼旭阳
梁 肖, 崔宝同 , 楼旭阳
(江南大学 物联网工程学院,江苏 无锡214122)
模型预测控制是20 世纪70 年代后期发展起来的一类新型计算机控制方法。它对系统模型要求低、鲁棒性好、抗干扰能力强,且其特有的滚动时域控制策略,使之在处理系统约束的问题上显示出巨大的吸引力,故被广泛应用于工业过程控制中,尤其是在炼油、化工、食品、钢铁等重要领域[1]。模型预测控制算法主要由3 部分组成,即预测模型、滚动优化和反馈校正,其控制性能在很大程度上依赖于预测模型的精度。但是在工业生产过程中,由于实际系统与过程模型之间的模型失配以及外部扰动等因素引起的模型不确定性,往往使模型预测控制的性能变差,甚至造成系统不稳定。因此,研究模型预测控制的鲁棒性具有重要的现实意义[2]。
鲁棒模型预测控制(Robust Model Predictive Control,RMPC)是一种在模型预测控制的框架内处理模型不确定性的控制方法,它融合了鲁棒控制和预测控制的优点,其研究内容主要包括预测控制算法的鲁棒性分析和鲁棒控制综合两个方面[3]。前者是指当系统存在不确定性和外部扰动时,对系统稳定性和动态性能的分析;后者是指如何获得有效的控制律,并在保证闭环系统鲁棒稳定的条件下,满足系统的鲁棒性能。RMPC 获取最优控制律的方法一般分为两类:一是H∞控制[4-8],即在保证系统稳定的同时能将扰动对系统性能的影响抑制在一定的水平下;另一类是引入min-max 优化技术求解最优控制律[9-12]。通常采用最糟情况下的性能指标函数。基于不变集理论,运用线性矩阵不等式(LMI)设计RMPC 的控制器,将优化问题转化成一个LMI化问题,求解预测控制律。
模型预测控制算法在每一个采样时刻都要求解最优化问题,这将导致在线计算量很大。特别地,当在鲁棒模型预测控制中考虑多面体不确定性时,其在线计算量将随着不确定集的顶点个数的增长而增长。近年来,由于神经网络在大规模并行处理和快速优化方面的显著优势,为降低在线MPC 计算量大的问题,多种神经网络模型被提出并用于模型预测控制问题的优化求解,如离散神经网络模型、双重递归神经网络模型,简化对偶神经网络模型、投影神经网络模型和广义投影神经网络模型等[13-17]。PAN Yunpeng 等[13]针对系统存在有界不确定性干扰问题,提出一种离散神经网络模型优化鲁棒模型预测控制问题,在保证系统鲁棒性的前提下,提高了在线优化速度,易于电路实现;WANG Jun 等[14]提出一种双重递归神经网络求解连续搅拌反应釜系统的非线性鲁棒模型预测控制问题,改善了产品质量,提高了生产效率。
文中在文献[14]的基础上,针对有界输入扰动系统,提出一种新的投影神经网络优化鲁棒模型预测控制问题,在保证系统稳定的情况下,求解预测控制律。
1 问题描述
考虑如下输入受限有界输入扰动模型[13]:

系统约束如下:
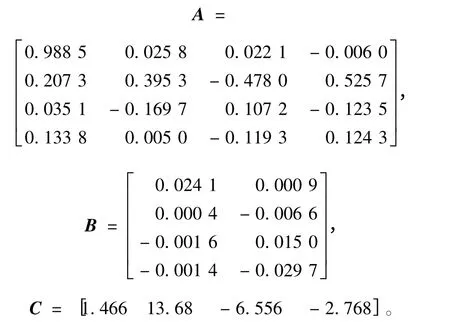
式中:k 为当前采样时刻;A,B,C 分别为相应的状态输入、输出矩阵;ω(k)∈Rn为有界不确定向量。u(k)∈Rm,x(k)∈Rn,y(k)∈Rp分别为系统输入增量的输入矩阵、状态矩阵和输出矩阵;umin,umax,Δumin,Δumax,ymin,ymax,ωmin,ωmax为各向量的约束值。
模型预测控制优化过程是一个滚动优化的过程。在每一个采样时刻,测量系统当前状态,通过在线求解模型预测控制优化问题的最优解,获得最优的控制输入向量。当系统受到不确定性干扰,且干扰有界的情况下,鲁棒模型预测控制律可以通过在系统干扰最大情况下,求解系统最优问题的最小值获得。最优问题J(Δu,ω)为有限控制时域范围内最糟性能指标函数。即
系统满足约束式(2)。式中:y(k + i/k),u(k + i/k),Δu(k +i/k),r(k+i/k)分别为k 时刻预测的k+i 时刻的输出、输入、输入增量和期望输出;N,Nu为预测时域和控制时域,且N ≥Nu;Q,P 为相应的输出权重矩阵和控制权重矩阵;系统控制增量Δu(k)满足如下关系式:

Nu时刻以后的控制作用保持不变。
由式(1)可知系统未来输出为
I ∈Rm×m表示单位矩阵。定义变量:
则系统输入增量和控制输入间关系满足:

因系统期望输出是已知的,干扰项是有界的,则由式(4)、式(5)得系统预测输出表达式可转化为

式中
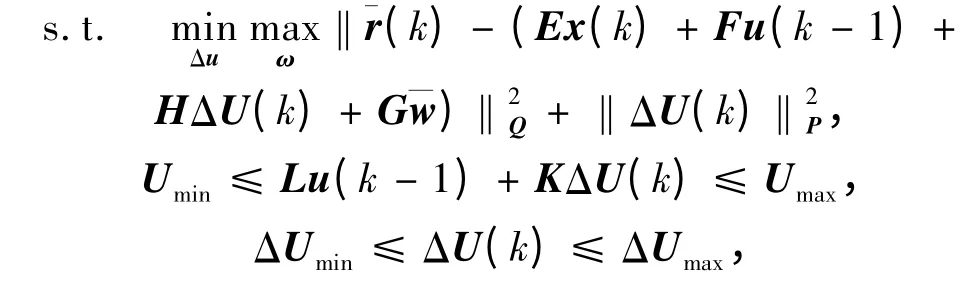
将式(6)代入性能指标函数式(3)得
其中
定义向量:v = ΔU(k),代入并简化式(7)。鲁棒模型预测控制最优化问题可描述成min-max 问题,形式如下:
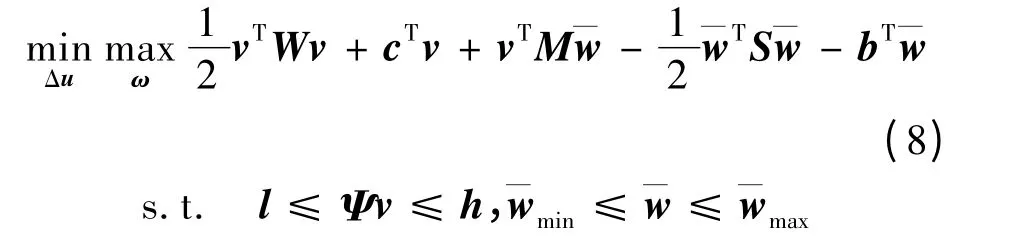
式中,相应矩阵和向量分别为
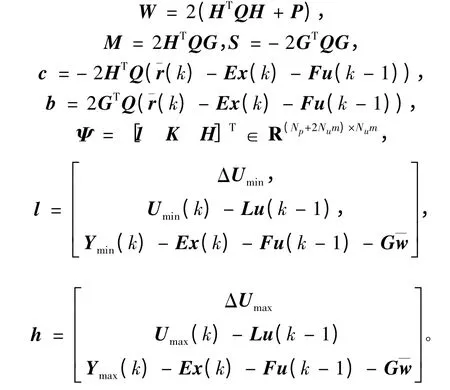
由上可知,系数矩阵W,M 是对称正定矩阵。因此,含约束和有界不确定干扰系统的鲁棒模型预测控制问题,可转化成一个受约束的凸二次min-max问题,故通过求解min-max 问题即可获得RMPC 的最优控制律。
2 投影神经网络
递归神经网络因其内在大规模并行运算、分布式处理和快速收敛等特性,使得神经网络在处理优化问题的实时求解上表现出巨大潜力,使得优化计算可以在通用计算机上执行,且优化时间提高了一个数量级。因此,近年来许多学者努力开发多种神经网络模型求解优化问题[13-21],尤其是运用神经网络求解min-max 优化问题的研究结果成效显著[18-21]。这些网络模型在保证模型收敛的情况下能精确求解优化问题,且网络结构易于电路实现。
文中基于文献[18]的神经网络优化模型,提出将投影神经网络用于鲁棒模型预测控制优化问题的求解。
式(8)可转化成如下变分不等式LVI 形式:
由鞍点定理[22-23]知,若存在z*=使得J(v,¯ω)满足
则点(v*)T为)的鞍点。显然,(v*,)T也是问题(8)的最优解。
由式(9)得

根据投影定理和式(10)得

其中,α,β ≻0 为网络规模参数;Pv(·),P¯w(·)为分段投影函数,满足:
根据投影定理和式(11),构建投影神经网络模型如下:
由网络模型结构知,该神经网络结构简单,易于电路实现,仅含有一个隐藏层。
3 数值分析
以文献[24]中描述的双输入单输出GLCC 流量计液阀-气阀-液位系统为例,验证文中所述方法的有效性,GLCC 多相流量计结构如图1 所示。
以k 时刻液、气位阀门的开启度作为系统控制量u(k),分离器内部液位量高度为系统输出y(k),系统的状态空间模型系统参数及约束如下:
因为液位保持一定的高度是系统保持稳定的必要条件,假定:采样周期t = 0.1 s,采样100 次;预测范围和控制范围N,Nu分别为10,5,权重矩阵Q =0.1I,P = 0.5I。期望输出液位r = 3,有界不确定性干扰满足:-0.2 ≤ω(k)≤0.3,GLCC 多相计量机系统状态变量x(k)可由状态观测器测量得到,设备开启前系统气相控制阀门和液相控制阀门开度为10% 和30%,气、液相阀门控制量及其增量和液位约束满足如下条件(单位:%):
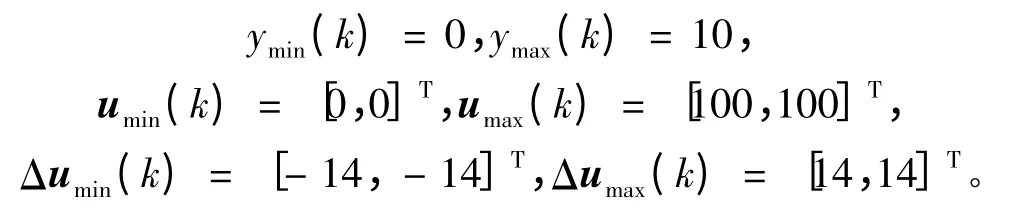
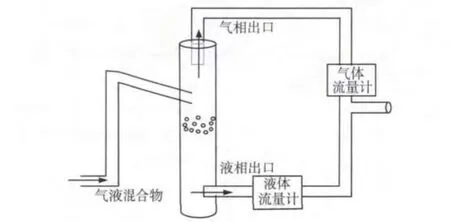
图1 GLCC 多相流计量系统结构Fig.1 Structure of the GLCC multiphase flow metering system
图2 为某一采样时刻双层投影递归神经网络的状态。
由图2 可以推出,在任一采样时刻,投影神经网络模型是全局稳定且收敛的,因此,文中所提方案是可行的,是能满足系统优化需要的。
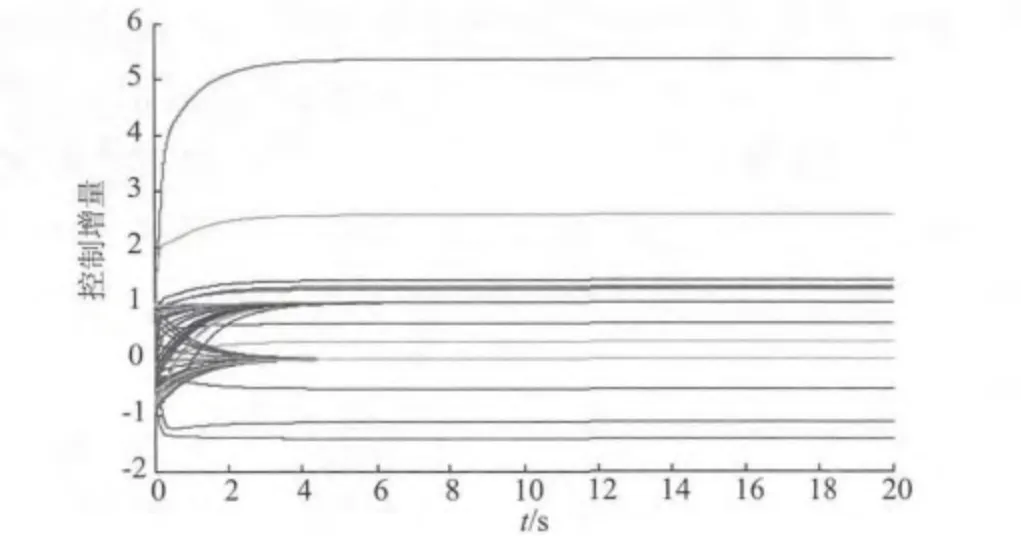
图2 投影神经网络的状态轨迹Fig.2 State variable trajectory of the projection neural network
图3 为达到期望液位高度时多相流量计的气、液相阀门的最优开度,即最优控制输入量,气、液相阀门的开度。图4 为达到期望液位高度时多相流量计的气、液相阀门的最优开度变化量,即最优控制输入增量。
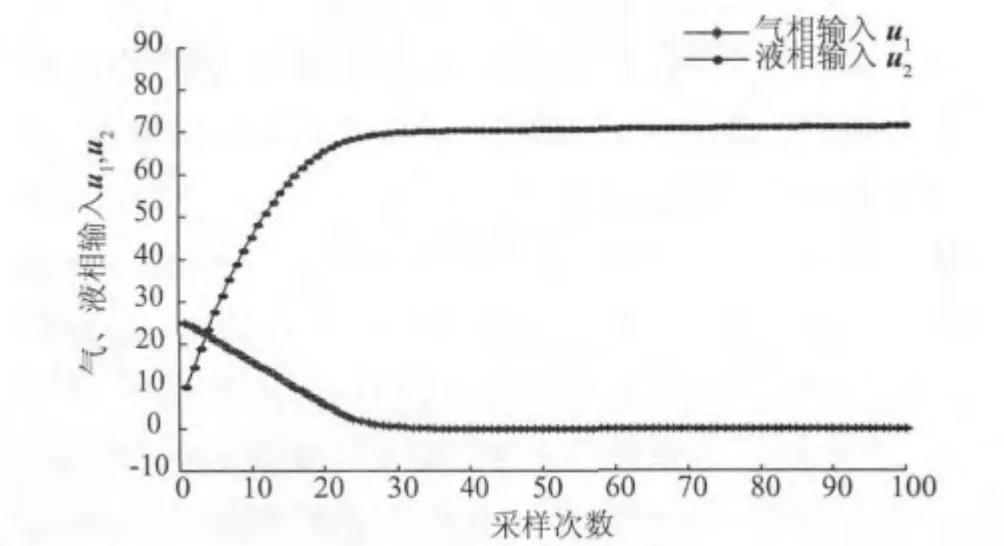
图3 GLCC 气液阀最优输入Fig.3 Optimal input signal curves of the GLCC gap-liquid control valve
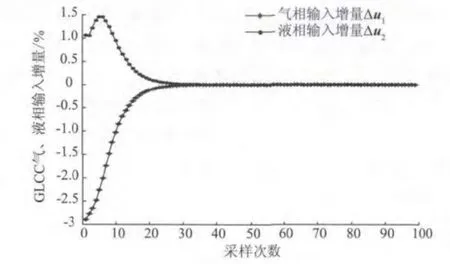
图4 GLCC 气液阀最优输入增量Fig.4 Optimal input increment signal curves of the GLCC gap-liquid control valve
由图3 ~图4 可知,在采样次数20 -30 之间,鲁棒模型预测控制系统在约束范围内能追踪期望液位轨迹并保持稳定状态,说明文中提出的神经网络优化算法,在有界不确定干扰下,控制系统是稳定的,并能达到理想的控制效果,保证了控制系统的鲁棒性,解决了在外界干扰情况下GLCC 多相流量计的液位控制问题。
4 结 语
文中利用min-max 优化方法和线性矩阵不等式技术,将难以求解的鲁棒模型预测控制最优化问题通过LVI 转化成带有约束的min-max 凸优化问题,从而获得了求解鲁棒模型预测控制器的途径。通过GLCC 多相流量计的仿真实验,证明了所提控制算法的可行性和闭环系统的鲁棒稳定性。
[1]席裕庚,李德伟,林姝.模型预测控制-现状与挑战[J].自动化学报,2013,39(3):222-236.
XI Yugeng,LI Dewei,LIN Zhu.Model predictive control-status and challenges[J]. Acta Automatica Sinica,2013,39(3):222-236.(in Chinese)
[2]Melanie N,Zeilinger,Davide M,et al.On real-time robust model predictive control[J].Automatica,2014,50(3):683-694.
[3]席裕庚,耿晓军,陈虹.预测控制性能研究的新进展[J].控制理论与应用,2000,17(4):469-475.
XI Yugeng,GENG Xiaojun,CHEN Hong.Recent advances in research on predictive control performance[J].Control Theory and Applications,2000,17(4):469-475.(in Chinese)
[4]WANG Juan,LIU Zhiyuan,CHEN Hong,et al.H∞output feedback control of constrained systems via moving horizon control[J].Acta Automatica Sinica,2007,33(11):1176-1181.
[5]李德伟,席裕庚.有界扰动系统高效鲁棒预测控制器设计[J].控制理论与应用,2009,26(5):535-539.
LI Dewei,XI Yugeng.Design of efficient robust model predictive controller for systems with bounded disturbances[J]. Control Theory and Applications,2009,26(5):535-539.(in Chinese)
[6]Orukpe,Patience E,ZHENG Xiang,et al.Model predictive control based on mixed control approach for active vibration control of railway vehicles[J].Vehicle System Dynamics,2008,46(1):151-160.
[7]黄鹤,李德伟,席裕庚.基于混合H2/H∞的鲁棒预测控制综合设计方法[J].控制与决策,2010,55(8):1269-1272.
HU He,LI Dewei,XI Yugeng.Synthesis of robust model predictive control based on mixed H2/H∞control approach[J].Control and Decision,2010,55(8):1269-1272.(in Chinese)
[8]HUANG He,LI Dewei,XI Yugeng.An improved robust model predictive control design in the presence of actuator saturation[J].Automatica,2011,47 (4):861-864.
[9]Kothare M V,Balakrishnan V,Morari M. Robust constrained model predictive control using linear matrix inequalities[J].Automatica,1996,32(10):1361-1379.
[10]Lee Y I,Cannon M,Kouvartakis B.Extended invariance and its use in model predictive control[J].Automatica,2005,41(12):2163-2170.
[11]Kanev S,Verhaegen M.Robustly symptotically stable finite-horizon MPC[J].Automatica,2006,42(12):2189-2194.
[12]WANG Fusheng,JIAN Jinbao.A nonmonotonic hybrid algorithm for min-max problem[J].Optimization and Engineering,2014,15(4):909-925.
[13]PAN Yunpeng,WANG Jun.Robust model predictive control using a discrete-time recurrent neural network[C]//Proceeding of the 5th International Symposium on Neural Networks:Advances in Neural Networks. Berlin,Heidelberg:Springer-Verlag,2008:883-892.
[14]ZHENG Yan,WANG Jun. Robust model predictive control of nonlinear affine systems based on a two-layer recurrent neural network[C]//Proceedings of International Joint Conference on Neural Networks.CA:IEEE,2011:24-29.
[15]ZHANG Liyan,QUAN Shuhai,KUI Xiang. Recurrent neural network optimization for model predictive control[C]//IEEE International Joint Conference on Neural Networks.Hongkong:IEEE,2008:751-757.
[16]ZHENG Yan,WANG Jun.Model predictive control of nonlinear affine systems based on the general projection neural network and its application to a continuous stirred tank eactor[C]//International Conference on Information Science and Technology.Nanjing:IEEE,2011:1011-1015.
[17]WANG Jun,PAN Yunpeng. Model predictive control for nonlinear affine systems based on the simplified dual neural network[C]//Control Applications and Intelligent Control.Saint Petersburg:IEEE,2009:683-688.
[18]GAO Xingbao,LIAO Lizhi,XUE Weimin. A neural network for a class of convex quadratic min-max problems with constraints[J].IEEE Trans on Neural Network,2004,15(3):622-628.
[19]GAO Xingbao,LIAO Lizhi.A novel neural network for a class of convex quadratic min-max problems[J].Neural Computation,2006,18(8):1818-1846.
[20]XUE Xiaoping,WEI Bian.A project neural network for solving degenerate quadratic min-max problem with linear constraints[J].Neurocomputing,2009,72(7):1826-1838.
[21]Nazemi A R. A dynamical model for solving degenerate quadratic min-max problems with constraints[J]. Journal of Computational and Applied Mathematics,2011,236(6):1282-1295.
[22]Stephm Boyd,Lieven Vandenberghe.Convex Optimization[M].England:Cambridge University Press,2004.
[23]袁亚湘,孙文瑜.最优化理论与方法[M].北京:科学出版社,1997.
[24]何德峰,鲍荣,郑凯华.快速增量约束预测控制及在GLCC 液位控制中的应用[J].化工学报,2013,64(3):993-999.
HE Defeng,BAO Rong,ZHENG Kaihua. Fast incremental predictive control with constraints and its application to control of GLCC liquid level[J].CIESC Journal,2013,64(3):993-999.(in Chinese)