基于Smith预估与仿人智能的反应釜温度控制设计与仿真
2015-01-13邹志云刘兴红郭宇晴
孟 磊 邹志云 刘兴红 郭宇晴
(防化研究院,北京 102205)
反应釜在精细化工及生物制药等过程工程领域应用广泛。反应釜控制系统中最重要的参数是反应温度,对反应温度的控制品质直接影响产品质量和产量[1]。由于反应过程的物料传输及化学反应等存在滞后性,使温度控制受到滞后性的影响;同时由内外温差引起的热交换使得温度变化呈现一定的非线性[2]。
针对这类非线性、大滞后控制对象,传统PID算法无法通过反馈回路及时反馈当前时刻对象的温度,难以达到理想的控制效果,Smith算法在PID控制器之上并接一个补偿环节,有效解决了这个问题[3]。仿人智能算法模拟人的控制行为无需精确的数学模型,可以充分利用控制系统特征信息,根据当前误差大小、方向和变化趋势及时调整控制模式。笔者将仿人智能与Smith预估器结合,利用Smith预估器对时滞对象进行补偿,并利用仿人智能算法对当前系统状态进行识别与决策,在反应釜温度模型上对算法进行了仿真验证。
未引入Smith预估器时,由于延迟环节e-τs的存在,被控量不能及时反映系统所承受的扰动,而比实际被控量延迟了时间τ,这会增大超调量、延长调节时间,甚至使系统不稳定。
引入Smith预估器后的控制系统方框图如图1所示。图1中虚线框内为Smith预估器,其传递函数为:
Gs(s)=Gp(s)(1-e-τs)
(1)

图1 Smith预估控制系统
原被控对象并联Smith预估器后,整个被控对象的传递函数可表示为:

(2)
式(2)不含滞后环节,则系统的闭环传递函数也不含滞后环节。故经Smith预估算法补偿后,控制效果会有极大改善。但在设计Smith控制器时,需要被控对象精确的数学模型,若模型不精确或出现负荷扰动,则系统仍然存在滞后,控制精度也就不能令人满意[3]。为此引入仿人智能算法来进一步改善Smith算法的控制效果。
2 仿人智能算法
仿人智能算法基于受控对象和控制规律的各种知识,最大限度地识别和利用控制系统动态过程提供的信息进行类似人的启发和直觉推理,可实现对缺乏精确数学模型的对象的有效控制[3]。其基本特征为:分层递阶的信息处理与决策机构;在线的特征辨识与特征记忆;开闭环相结合、定性定量相结合的多模态控制;启发式和直觉推理的灵活应用[4,5]。
仿人智能算法由误差曲线启发获取控制规则,充分利用系统动态过程蕴含的信息。通常选取当前时刻误差,误差导数及其组合作为控制器输入,选取特征量en×Δen、Δen×Δen-1来辨识系统当前状态,控制器输出可以描述为特征量的映射,即:
un=f(en,Δen,Δen-1)
(3)
式(3)中en为当前时刻误差;en-1、en-2分别为前一时刻和前两时刻误差,其中Δen=en-en-1, Δen-1=en-1-en-2。图2为系统典型阶跃响应曲线。
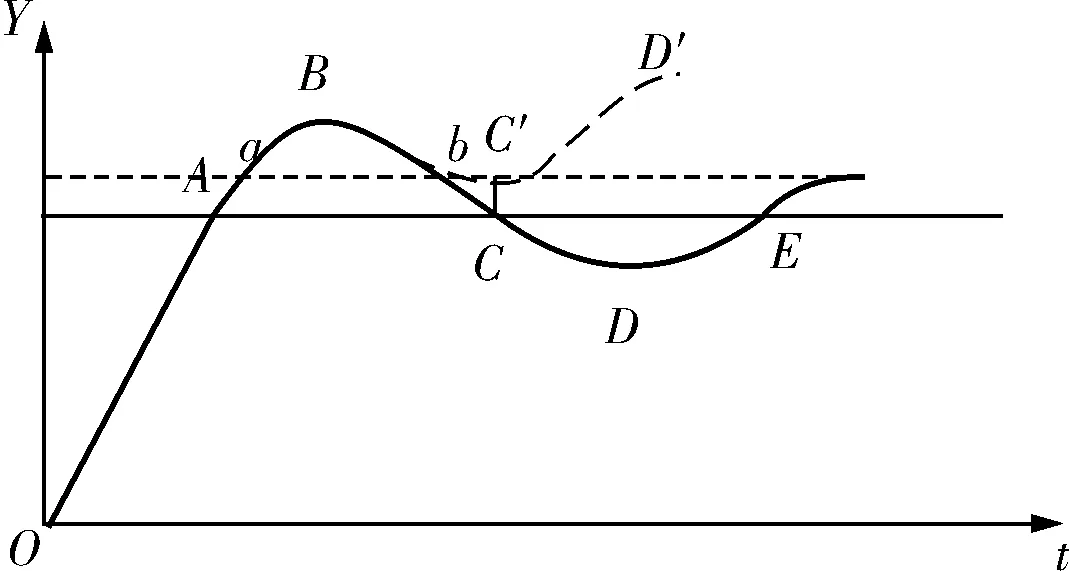
图2 系统典型阶跃响应曲线
结合图2可知:
a. 特征量en×Δen表征误差变化方向。若en×Δen>0,则误差在朝着绝对值增大的方向变化,如AB、CD段;若en×Δen<0,则误差在朝着绝对值减小的方向变化,如OA、BC段。
b. 特征量Δen×Δen-1表征极值点。若Δen×Δen-1<0,则说明该点前后误差的变化趋势发生了改变,该点为极值点,如B、D点;若Δen×Δen-1>0,则该点不是极值点。
c. 将en×Δen、Δen×Δen-1两个特征量联合使用,可以判明误差出现极值点后的变化趋势,B点为Δen×Δen-1<0,en×Δen>0;C′点为Δen×Δen-1<0,en×Δen<0,故B点、C′点均为极值点,但B点之后误差会减小,C′点之后误差会增大。
基于以上认识,可以设计仿人智能算法的控制规则[3]:
a. |en|>M1,说明误差绝对值过大,此时令控制器的输出最大或最小,以迅速调整误差,相当于开关控制;
b.en×Δen>0∩|en|>M2,误差朝绝对值增大方向变化且误差绝对值较大,控制器实施较强控制,en×Δen>0∩|en| c.en×Δen<0∩Δen×Δen-1>0∪en=0,误差绝对值减小趋势,或者已经达到平衡,控制器输出不变; d.en×Δen<0∩Δen×Δen-1<0,此时处于极值状态,若|en|>M2,应实施较强的控制作用,若|en| e. |en|<ε,说明误差绝对值很小,加入积分控制以减小稳态误差。 实际的反应釜温控系统是一种典型的大惯性、大时滞、非线性系统,难以建立精确的数学模型。结合机理建模和实验建模,对反应釜温度系统做一粗略的分析。 反应釜加热过程主要参数有:加热电压U、釜内温度T、散热量Q,电压加到电阻丝上实现对釜加热,散热量取决于釜内外温差T。假设釜内温度均匀,釜容积和热交换系统稳定,由能量守恒[2,6],釜内增加能量+散热能量=输入总能量,故: CdT(t)+(T(t)-T0)dt/R=Q(t)dt (4) 式中C——釜内混合物比热; Q(t)——t时刻输入总能量; R——釜外壁放热系数; T0——反应时外界温度; T(t)——t时刻釜内温度; τ——系统纯滞后的时间系数。 拉氏变换并整理可得: (5) 考虑釜内温度由高到低传播,会引起温度变化延时,故式(5)可写成一阶带有延迟的形式: (6) 对反应釜温控的一阶带有延迟的模型,可进一步通过曲线辨识法辨识出对象的模型参数[2,7],笔者采用以下的一阶迟滞对象进行仿真: (7) 仿真系统Simulink框图如图3所示。其中HSIC为仿人智能控制器所封装成的子系统,该子系统Simulink框图如图4所示。 图3 系统Simulink仿真框图 图4 仿人智能控制器Simulink框图 其中Select是用MATLAB编制的S函数,它能够对系统当前状态和变化趋势进行识别,进而给出触发信号到控制模态1~5,从而实现仿人智能算法中的5种控制规则的灵活切换。 针对式(7)对象,采用传统PID控制器参数整定的经典Ziegler-Nichols法(Z-N),整定出一组PID参数Kp=0.9,Ki=0.00625,Kd=36,此时控制效果较差。将Smith预估器引入PID控制中的Smith-PID算法,较传统PID控制效果有了显著提升。最后基于仿人智能的Smith算法则比传统PID和Smith-PID都有着更好的表现。仿真结果如图5所示。 图5 仿真结果 笔者在前人基础上,阐述了针对大时滞对象的Smith预估算法和仿人智能算法的思想、特点和实现步骤。对理想反应釜进行建模,得到了一阶时滞模型,将仿人智能算法与Smith算法结合用于反应釜温度控制。 仿真结果显示,Smith算法较好地补偿被控对象的时滞环节,仿人智能算法可以识别误差的各种特征并做出相应的决策,实现多模态灵活控制,二者结合用于反应釜温度控制,在快速性、平稳性及准确性等指标上较之传统PID算法有显著提升。仿人智能算法涉及到较多经验参数,需在实际工作中不断积累,方能够取得较好的效果。 [1] 金晶.连续搅拌釜式反应器系统温度控制研究[D].西安:西安电子科技大学,2010. [2] 王春晓,刘海,杜清府.前馈Smith控制在反应釜控制中的应用研究[J].测控技术,2011,30(4):59~62. [3] 刘金琨.先进PID控制Matlab仿真[M] 北京:电子工业出版社,2014:124~128,296~297. [4] 孙奉昌,乐恺,姜泽毅,等.智能控制算法对加热炉温度控制研究[J].热能动力工程,2009,24(3):337~341. [5] 周彦,何小阳,王冬丽.时变大滞后过程的仿人智能模糊控制[J].自动化技术与应用,2005,24(11):9~12. [6] Mikles J,Fikar M.Process Modeling,Identification,and Control[M].Berlin:Springer,2007:155~160. [7] 欧阳奇,谢志江,伍成波,等.零极点配置自校正温度控制的建模与仿真[J].重庆大学学报(自然科学版),2006,29(6):67~70.3 反应釜过程建模


4 算法仿真验证



5 结束语