PMSM 直接转矩控制中功率因数角与磁链关系研究
2015-01-13曹林柏赵宏革朱景伟李云鹏李世霖
曹林柏,赵宏革,朱景伟,李云鹏,李世霖
(大连海事大学,大连116026)
0 引 言
永磁同步电动机(以下简称PMSM)具有体积小,质量轻和运行可靠等优点,在国防、航空、航运等领域得到了广泛的应用。直接转矩控制技术以其控制结构简单、转速和转矩动态响应快等优点[1-2],吸引了越来越多的国内外学者的研究目光。大多数学者将研究方向放在减小直接转矩控制的转矩脉动上,提出了采用零电压矢量注入方式进行最优电压矢量占空比调整方法[3],引入内模控制器电压矢量调整方法[4]等减小转矩脉动的方法;部分学者根据电动机损耗与转矩、转速和定子磁链的关系,提出了最优化的定子磁链给定值[5];但是目前还没有学者对直接转矩控制系统中电机运行时功率因数角与定子磁链给定值的关系进行研究。
本文根据PMSM 运行时的向量图和电机模型,对PMSM 直接转矩控制系统中电机运行时的功率因数角与定子磁链给定值的关系进行理论分析,得出了功率因数角与磁链给定值的定量关系,对研究PMSM 直接转矩控制策略,改善电机的功率因数,有积极的意义。特别是对容量有限的电网,如船舶电网,提高控制电机的功率因数,对减小逆变器的容量,提高电机运行效率,改善电网电能质量有很现实的意义。
1 功率因数角与定子磁链给定值的关系分析
PMSM 稳定运行于同步转速时,其向量图如图1 所示。以转子磁链方向为d 轴,空载反电动势方向为q 轴建立坐标轴,图1 中下标d,q 分别表示直、交轴分量;下标s,r 表示定子、转子的物理量;U 为电机定子电压,E0为永磁电机空载反电动势,I 为电流,L 为电感,X 为电抗,R 为电阻,Ψ 为磁链,ψ 为Is超前E0的角度,θ 为U 超前E0的角度,即功率角,φ为U 超前Is的角度,即功率因数角;δ 为定子磁链Ψs与转子磁链Ψr之间的夹角。

图1 永磁同步电机运行时向量图
由图1 可知,在电机负载一定的情况下,电动机定子电流的q轴分量基本保持不变,电动机的直接转矩控制系统电机的给定磁链值为Ψs2时,定子电流Is2与定子电压U 同相位,电动机运行于单位功率因数状态,电机只输出有功功率;当给定磁链为Ψs1,小于Ψs2时,Is1的相位超前于U,电动机运行于容性功率因数状态;当给定磁链值为Ψs3,大于Ψs2时,Is3的相位滞后于U,电动机运行于感性功率因数状态。由以上分析可知,当负载转矩一定时,可以通过调整直接转矩控制系统中PMSM 定子磁链的给定值来调整PMSM 运行时的功率因数,进而提高电机的工作效率。
稳定运行时永磁电动机的等效电路如图2 所示,根据双反应理论,忽略铁耗,可得到电动机的电压方程:

式中:u 为定子电压;i 为定子电流;ω 为电角速度。
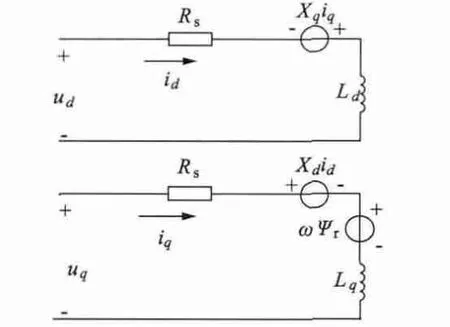
图2 稳态运行时永磁电动机等效电路
则PMSM 运行的视在功率:

式中:P=udid+uqiq,Q=uqid-udiq分别为有功功率和无功功率。将式(1)代入式(2)可得:

当电机的功率因数角给定为φ 时,有:

将式(3)和式(4)代入式(5)得:


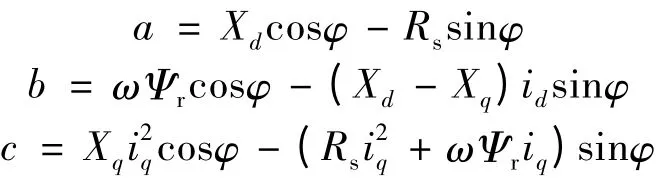
则id是含功率因数角φ 和iq的一元二次方程,由一元二次方程求根公式,并考虑id的物理意义得:

方程的系数:
PMSM 的电磁转矩方程:

当电机的负载转矩Te一定时,联立式(7)和式(8)可以求得id,iq,PMSM 的磁链方程[6]:

在PMSM 直接转矩控制系统中,定子磁链的给定值:

将id和iq值代入式(9)便可得到Ψd,Ψq的值。由式(10)可得出对应于功率因数角φ 时的定子磁链给定值给定Ψ*
s 。
2 PMSM 直接转矩控制系统建模仿真
由以上分析,当永磁同步电机稳定运行时,在电机恒定负载转矩的情况下,可以通过给定功率因数角φ 的值,得出该功率因数对应的定子磁链给定值,控制电机在指定的功率因数下运行,系统控制框图如图3 所示。

图3 给定φ 角下的PMSM 直接转矩控制系统
根据式(7)~式(10),建立给定功率因数角φ下的给定磁链计算模型,计算出定子磁链给定值,嵌入到PMSM 直接转矩控制系统中。通过检测PMSM 的三相定子电压和电流值,经过3/2 变换得到两相静止坐标系(α-β 坐标系)下的定子电压和电流值;然后经过定子磁链和转矩估算模块,利用uα,uβ,iα和iβ值,估算出电机的定子磁链Ψs,电磁转矩Te和定子磁链所在的扇区SN;将电机转速测量模块反馈的电机转速n 与给定转速n*比较,经过PI调节器,得到给定转矩;直接转矩控制系统根据* 与Ψs的差值,经磁链滞环比较器,得到ΔΨ 信号,T*
s 与Te的差值,经转矩滞环比较器,得到ΔT信号,以及定子磁链所在的扇区信号SN,通过查电压矢量开关选择表,选择合适的电压开关矢量,控制逆变器驱动PMSM 运行。电压矢量和扇区划分如图4 所示,表1 为电压空间矢量表。

图4 电压矢量和扇区划分图
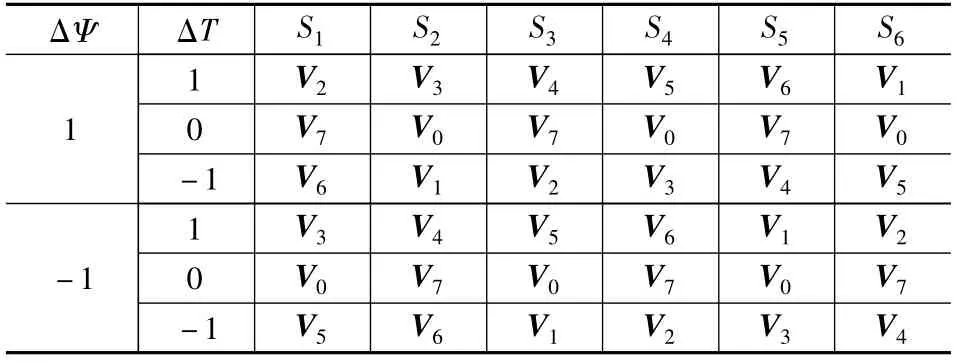
表1 电压空间矢量表
3 仿真结果和分析
为了验证根据功率因数角计算定子磁链给定值方法的正确性,利用MATLAB/Simulink 建立给定功率因数角下的PMSM 直接转矩控制模型。本文所用电机参数:定子电阻2.88 Ω,交、直轴电感Ld= Lq=0.006 4 H,给定转速为1 000 r/min,极对数为2,转子永磁体磁链值为0.3 Wb,磁链滞环阈值为±0.01 Wb,转矩滞环阈值为±0.01 N·m,转动惯量J =0.000 8 Kg·m2,粘滞系数B =0.005。分别在0,0.15 s,0.25 s,0.45 s,0.55 s 时刻给定功率因数角为-π/4,0,π/4,0,-π/4;在初始时电机带1.5 N·m 负载起动,在0.35 s 时将负载增大至2 N·m。
PMSM 直接转矩控制系统的转速和转矩的仿真结果如图5 所示。由图5 可知,电机的起动时间大约为0.02 s,之后电机稳定运行于给定转速下,负载转矩变化时,系统转矩响应较快,转速基本保持不变,控制系统具有较好的动静态性能。

图5 电机转速和电磁转矩仿真波形
图6 是功率因数角的给定值和实际值变化曲线,由图6 可知,电机起动完成后,稳定运行时的实际功率因数角与给定功率因数角一致(由于测量和计算实际功率因数角时需要经过滤波处理,因此图中实际的功率因数角与给定值存在一定的滞后)。图7 为定子磁链给定值,由图7 可以看出,0.02 s 到0.35 s 时间内,保持电机负载转矩为1.5 N·m,磁链给定值随功率因数角的变化而变化,φ=-π/4 时,磁链给定值为0.285 Wb;φ =0 时,磁链给定值为0.300 Wb;φ=π/4 时,磁链给定值为0.315 Wb;在0.35 s 时刻,电机的负载转矩由1.5 N·m 增加至2 N·m,磁链给定值也随转矩的增大而变化,在0.35~0.65 s 时间内,对应功率因数角为π/4,0,-π/4 时的磁链给定值分别为0.319 Wb,0.302 Wb,0.278 Wb。
图8 为电机定子电流波形,定子电流的正弦度好,互差120°,满足永磁电机直接转矩控制的要求;电流幅值的大小随功率因数角的变化而变化,在功率因数角为0 时,电流幅值最小;同时对比图8(a)和图8(b)还可以看出,电流的幅值随着转矩的增大而增大。
图9 为不同给定条件下PMSM 的运行效率,由图9 可知,电机的效率随功率因数的增大而增大,在单位功率因数时效率最高。
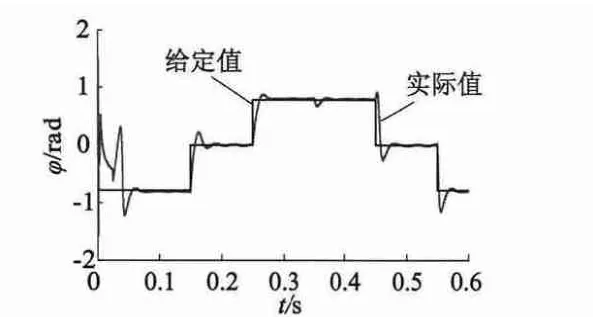
图6 功率因数角的给定值和实际值变化曲线
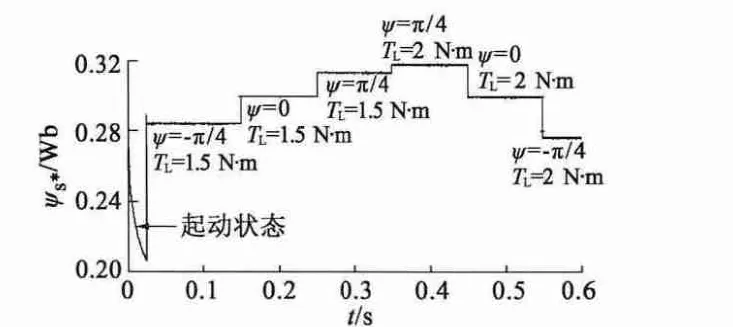
图7 定子磁链给定值
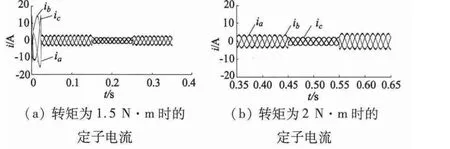
图8 电机定子电流波形
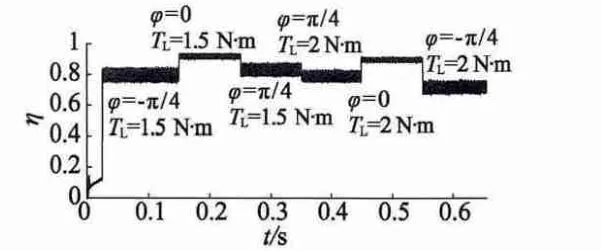
图9 不同给定条件下的运行效率
表2 为不同功率因数角和负载转矩下的磁链给定值和效率,φ*为给定功率因数角,φ 为实际功率因数角,为磁链给定值,η 为效率。由表2 可知,对应于不同功率因数角和负载转矩,电机定子磁链的给定值不同;同时,电机的运行效率η 也随着功率因数角变化而变化,在功率因数角为0 时,效率最高。

表2 不同功率因数角和负载转矩下的磁链给定值
4 结 语
本文通过分析PMSM 直接转矩控制中,功率因数角和定子磁链给定值的关系,得出PMSM 直接转矩控制定子磁链的给定值与电机运行的功率因数角和负载转矩的大小有关,推导出功率因数角和磁链给定值的定量关系。当定子磁链给定值接近于转子永磁体产生的磁链时,功率因数较高,给定磁链与转子磁链偏差越大,功率因数越小。通过建立仿真模型,验证了根据功率因数角确定给定给定磁链的方法的正确性。在PMSM 直接转矩控制系统中,对于选取给定磁链让电机工作在高功率因数、高效率状态以及改善电网电能质量等方面,该方法有重要的理论和现实意义。
[1] 李夙.异步电动机直接转矩控制[M].北京:机械工业出版社,2001.
[2] ZHONG L,RAHMAN M F,HU W Y,et al.Analysis of direct torque control in permanent magnet synchronous motor drives[J]. IEEE Transactions on Power Electronics,1997,12(3):528-536.
[3] 王真,陈召磊,曹晓冬.矿井提升机直接转矩控制系统转矩脉动最优控制[J].工矿自动化,2014,40(2):54-58.
[4] 张淼,黎庆发,陈思哲,等.永磁同步电机的内模直接转矩控制[J].电气传动,2014,44(4):25.
[5] 孙文,张兴华. 永磁同步电动机直接转矩控制的效率优化[J].工矿自动化,2014,40(3):56-59.
[6] LANG Bao-hua,LIU Wei-guo,ZHOU Xi-wei,et al. Research on direct torque control of permanent magnet synchronous motor based on optimized state selector[C]//IEEE International Symposium on Industrial Electronics,2006:2105-2109.
