基于CAN-GPRS技术的汽车远程监控系统
2015-01-13温阳东冯英峰
温阳东 杨 玲 冯英峰
(合肥工业大学电气与自动化工程学院,合肥 230009)
目前国内市场上的汽车远程监控系统大都存在着一定的局限性,主要表现在汽车受非法侵害时,车主不能在第一时间获取被盗信息并采取有效措施[1],如汽车定位信息、盗窃者的图像信息及门禁与点火控制等。因此,开发更为有效的汽车防盗系统是当今研究的热点课题之一。
CAN(Controller Area Network)控制器局域网络具有成本低、总线利用率高、传输距离远、速率高及错误处理可靠等特点,使其越来越广泛地应用于汽车故障诊断和车身电子控制单元上。GPRS(General Packet Radio Service)通用分组无线服务技术则以通信价格低廉、覆盖范围广、数据传输可靠和移动服务灵活的特点为远程监控技术的发展提供了一种新的思路。
笔者在现有的汽车远程监控技术的基础上,结合CAN、GPRS及GPS等技术,构建基于CAN-GPRS的汽车远程监控系统,以期汽车受到非法侵害时,该系统能将防盗报警信息、汽车当前位置信息和车内图片信息及时地以GPRS网络数据传输的方式告知车主,车主则可以通过无线设备对汽车实施必要的远程控制,防止汽车被进一步非法移动。
汽车远程监控系统主要由车内主控单元和可随身携带的车主终端两部分组成,其中车内主控单元包括中央模块、传感器模块、报警器模块、图片处理模块、GPS模块、无线钥匙接收器模块、中央门控锁节点、发动机控制节点和GSM/GPRS单元[2];车主终端则包括无线钥匙模块和手机终端。
1.1 主控单元防盗监控系统
车主离开时,汽车自动启动防盗模式。当振动传感器和人体热释红外传感器采集到入侵信息后,传感器将采集到的信号信息送入中央模块,由中央处理器判断是否为入侵,如果确认汽车处于被盗状态就立即启动声光报警装置,通过CAN总线启动GPRS连接,并向车主发送“汽车被入侵”的短信。同时,启动GPS接收模块[3]和图片处理模块,循环采集车身定位信息和车内图片信息,GSM/GPRS单元通过GPRS彩信方式将采集到的节点入侵信息和车内图片信息发送给车主。主控单元防盗工作流程如图1所示。
1.2 车主终端远程监控系统
车主收到入侵短信、车身定位和车内图片信息后,按下无线钥匙上相应的功能按钮,将车门的开锁或关锁密文数据通过433MHz无线收发器发送至主控单元[4]。主控单元接收密文数据、解密并进行功能识别后,中央模块通过CAN网络将关锁数据发送到各车门控制节点,各车门控制节点接收数据并由节点微控制器向车门锁的执行单元传输控制指令,控制车门自动锁闭[5]。同时,中央模块监控发动机的控制节点状态,如果发动机没有工作,则直接断开发电机控制节点;否则切断电子点火电路并阻断喷油,强制发电机熄火、切断发电机控制节点。车主终端远程监控工作流程如图2所示。

图1 主控单元防盗工作流程

图2 车主终端远程监控工作流程
2 硬件设计
2.1 主控单元
主控单元的硬件组成如图3所示,系统选用LPC2100 RAM微处理器,它是一个基于支持实时仿真和嵌入式跟踪的16/32位RAM7TDMI-S CPU,功耗极低、非常小的64脚封装、4路10位ADC、多个串行接口,而且片内集成有大量外设。其片上资源及其相关接口足以满足主控单元的功能需求,且LPC2129内部集成了两个CAN控制器,CAN总线只需外接Philips的高速CAN收发器TJA1050即可实现主控芯片与GPRS模块、车门控制节点及发动机控制节点等电子装置之间的通信[6]。
GPRS GR47模块主要实现SMS/MMS的收发,及时准确地将警报信息和车辆状况信息发送给车主,以便进一步采取有效措施确保车辆安全。GR47模块内置了TCP/IP协议栈,可用AT命令对其进行设置,使用方便。此外LPC2109微控制器内部集成有一路CAN控制器,GPRS模块通过USART接口与其连接。
图片处理模块的主要功能是采集汽车内的图片信息,并对图片信息进行压缩处理,这种设计的目的是为了减小防盗系统的误报率,能有效防止因外界环境影响而对设备产生的干扰[7]。其中CMOS图片传感器采用OV7640,具有体积小、重量轻、功耗低及易于编程等优点,且其自带的2mm镜头能够被隐秘地安置于驾驶座前方便于拍摄的位置,而不易被察觉。图片信息压缩处理采用MV3018,可以与OV7640图像传感器进行无缝连接,完成JPEG压缩和解压缩。
GPS定位在汽车安全防盗和远程监控方面具有重要地位。该系统将其与无线通信技术结合,实现故障车道路救援及失车找回等各种功能。主控单元的Jupiter021 GPS装置是单向的GPS接收机,能够接收来自导航卫星的车身定位信号。
无线收发器选用nRF905,其工作频率433MHz,输出功率和通信频道可通过程序进行配置并通过SPI1接口和相关的GPIO接口与LPC2129相连。
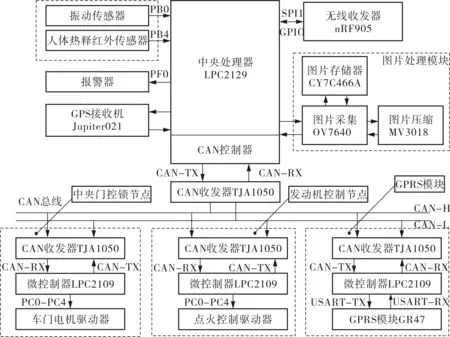
图3 主控单元硬件框图
2.2 无线钥匙模块
无线钥匙模块的硬件结构(图4)比较简单,主要由编码器和高频发射电路组成。其中编码器选用的是专用编码芯片HCS301,它将用户控制信息进行滚动码加密处理,再经由高频发射电路发送,主控单元的nRF905接收并交由主控芯片解码和判别。由于该项加密技术由专用的软件/硬件解码器解码,考虑到成本与结构,选用在主控芯片LPC2129内置的Keeloq解码软件实现。
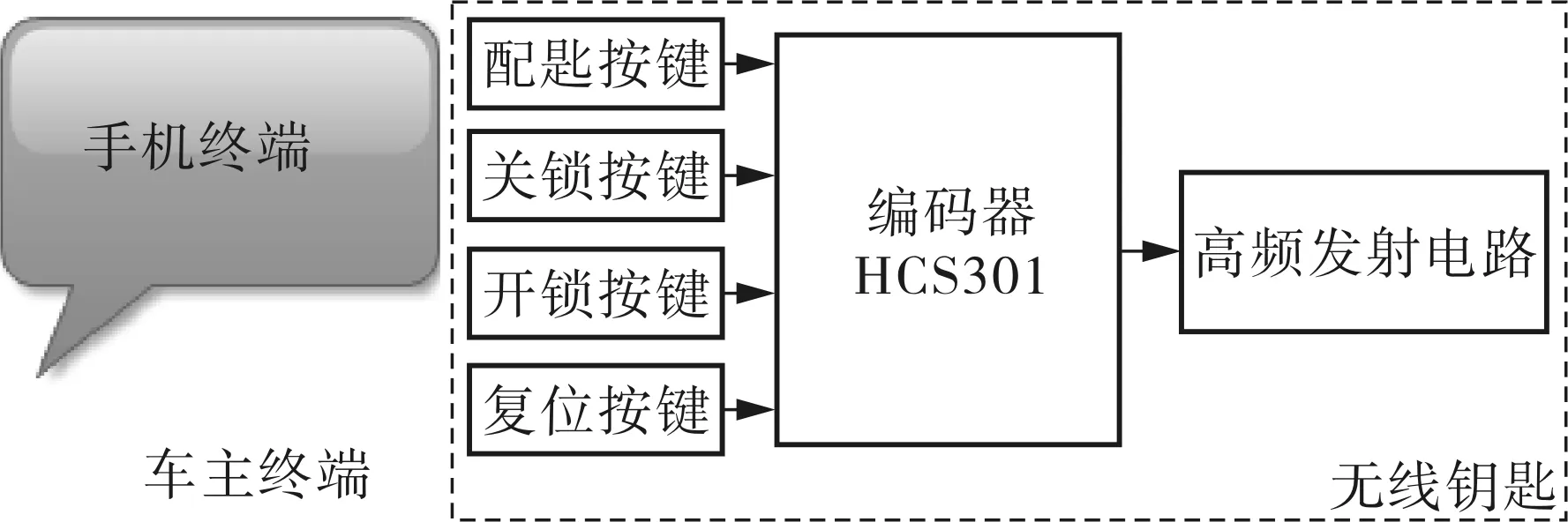
图4 无线钥匙模块硬件框图
3 软件设计
3.1 GPS系统软件
在中央处理器确认汽车处于被盗状态后,启动GPS模块来确定汽车的当前位置,并将这些位置信息发送至车主的手机终端(图5),GPS系统的工作流程:接收机启动后,自动接收卫星信号;GPS收到卫星信号时,对汽车进行定位并将相关信息发送到附近的基站;基站通过通信网络将定位信息以SMS的方式发送给车主。在此发送之前,先进行网络状况的判断[8]。如果没有网络信号,信息可以暂存至移动台,之后每隔一定时间重新发送,直到网络正常,车主收到车身定位信息为止。

图5 GPS系统工作流程
3.2 GPRS单元程序设计
GPRS单元接收中央模块的远程监控指令;开启GPRS短信息功能,向车主发送防盗报警信号和车身定位信息;开启GPRS彩信功能,向车主发送车内图片信息。实现车主对汽车是否被盗的准确判断,以及对汽车位置的实时跟踪,有利于进一步控制汽车。该部分的软件流程如图6所示。

图6 GPRS单元程序流程
3.3 SMS与MMS的发送
SMS的发送主要由GR47初始化和短信息的发送两部分组成,两者的程序流程如图7所示。系统将图片信息封装成MMS数据包,GR47建立拨号连接,通过WAP协议栈将彩信发送到WAP网关;然后移动中心进行寻址、存储并转发给车主。MMS的实现与发送主要由GR47模块初始化MMS的实现与发送组成。
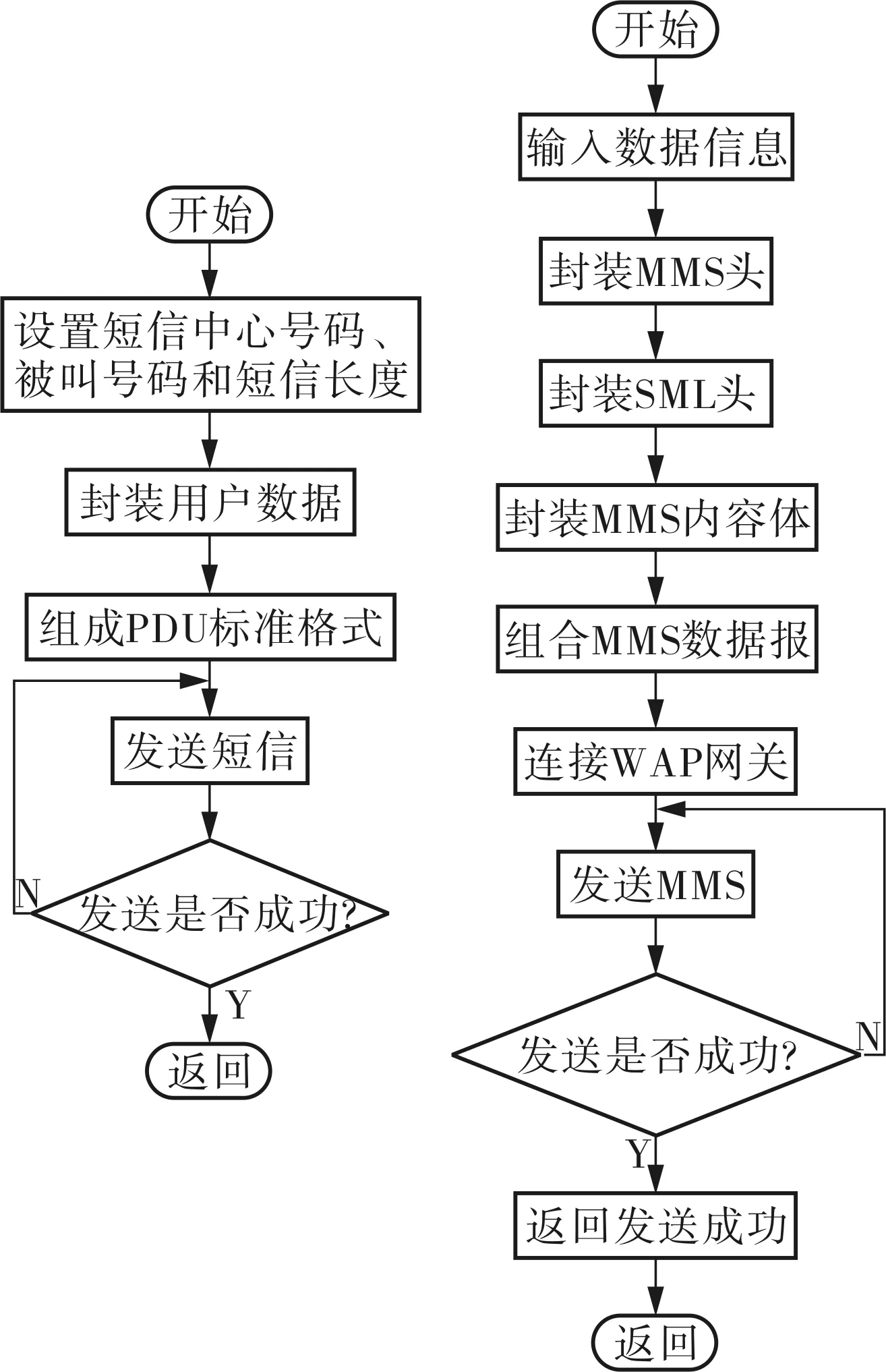
图7 SMS与MMS的发送子程序流程
4 结束语
笔者以ARM7TDMI-S CPU为核心,结合CAN总线技术、GPRS通信技术和GPS全球定位系统设计了汽车防盗远程监控装置,并通过实验验证了系统的可行性和可靠性,可实现车主离开车辆后的安全状态监测、非安全状态下的人车对话和车辆失窃后的跟踪定位,较好地弥补了现有多数防盗系统不能在第一时间警示车主汽车被盗并采取进一步有效措施的局限性。此外,通过对系统添加GPRS监控终端,设置监控室,即可实现批量汽车的集中管理,同样接收并存储GPS车身定位信息。在车主手机没电或者无线钥匙故障的情况下,实现第三方报警与监控,具有较好的实际应用开发前景。
[1] 张会娟,朱瑞祥,吴峰.汽车防盗装置的现状及展望[J].公路与汽运,2005,(6):13~15.
[2] 薄志霞.汽车电工电子技术[M].北京:化学工业出版社,2008:112~153.
[3] 李天文.GPS原理及应用[M].北京:科学出版社,2010:215~233.
[4] 马士宝,张国玉,孙向阳,等.基于GSM模式的无线报警系统设计[J].长春理工大学学报(自然科学版),2009,32(1):51~53.
[5] 张建军,穆远祥,韩江红.一种16位码红外遥控器的解码方法[J].合肥工业大学学报(自然科学版),2008,15(2):56~59.
[6] 黄友,张向文,许友.基于CAN和GPRS技术的汽车防盗系统设计与实现[J].计算机测量与控制,2013,21(8):2168~2170.
[7] 陈渝光,周桐,吕红梅.基于GPRS/GPS的汽车防盗系统[J].测控技术,2011,30(3):33~36.
[8] 胡瑶.基于CAN、GPRS技术的电动汽车远程监控系统研究[D].武汉:武汉理工大学,2012.
