基于神经网络优化的永磁同步直线电机迭代学习位置控制方案
2015-01-13温阳东
汪 昕 林 勇 温阳东
(合肥工业大学电气与自动化工程学院,合肥 230009)
永磁同步直线电机(PMLSM)是一种将电能直接转换成直线运动机械能的传动装置,近年来在工业控制领域有着广泛的应用[1]。由于直线电机系统是一个多变量、时变的非线性系统,因此传统的PID算法对这类系统很难实现精确控制。
迭代学习(ILC)是一种新型控制算法,在给定时间内能以简单的学习算法实现对期望轨迹的高精度跟踪[2]。ILC可以处理系统中各种周期性的扰动,且不依赖于系统的精确模型[3]。ILC适合于某种重复运行性质的被控对象,可实现有限时间区间上的完全跟踪任务,因此对它的研究对直线电机的控制具有重要意义[4]。但是单纯的开环ILC算法具有局限性,其基本控制原理是利用系统当前运行产生的误差信息,修正其控制输入,以得到系统下次运行时的控制输入。王丹凤等提出了一种基于神经网络优化的ILC控制算法,但是该算法采用的仍是开环控制,对误差信息的利用不够充分[5]。白敬彩和吴君晓提出了一种开闭环ILC控制算法,但该算法是固定的学习速率,学习速度慢[6]。在此,笔者采用神经网络优化的开闭环P型ILC控制算法来控制PMLSM,以较快的收敛速度逼近期望位置轨迹,达到较理想的位置控制效果。
对PMLSM采用矢量控制方法,利用坐标变换,建立永磁同步电机在d-q坐标的数学模型,令d轴的参考电流id*=0,因此电磁力矩仅和q轴电流有关,便于控制。
PMLSM的机械运动模型可以描述为:
式中Ffric——摩擦力;
Fm——电磁推力;
Frip——推力脉动;
iq——q轴电流;
Kf——推力系数;
m——动子质量。
磁阻产生的脉动力模型Frip=bsin(ω0x),x为位置[7]。完整的摩擦力模型通常很复杂,选用LuGre摩擦力数学模型[8],即:
Ffric=[fc+(fs-fc)e-(v/vs)2]sgn(v)+Bv
式中B——粘滞摩擦系数;
fc——动摩擦力;
fs——静摩擦力;
sgn()——符号函数,其值由运动方向决定;
vs——润滑系数。
PMLSM的电压平衡模型为:
式中Ld、Lq——动子电枢d、q轴电感分量;
R——电枢电阻;
ψf——定子的磁链。
根据上述模型建立的控制系统模型如图1所示,为典型的三环控制结构,位置环采用ILC算法进行调节,速度环和电流环采用PI算法进行调节[9]。
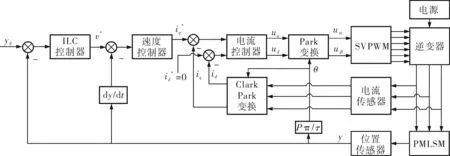
图1 控制系统模型
系统工作过程:ILC控制器根据期望位置数值与反馈值之差,得到速度的参考值,该参考值与实际速度值相比较后,将差值送入速度调节器,得到q轴参考电流值。由此可得到d、q轴电压值,经过坐标变换得到α和β轴的参考电压,并由电压空间矢量脉宽调制器(SVPWM)生成逆变器的驱动信号来控制电机。
2 控制方案
2.1 开环ILC算法
开环P型ILC的学习律为:
uk+1(t)=uk(t)+kpek(t)
式中ek(t)——第k次迭代的误差;
k——迭代次数;
kp——ILC的学习增益;
uk+1(t)——第k+1次的控制输入。
2.2 开闭环ILC算法
由于开环ILC只利用了系统前一次运行的信息,对当前运行的信息没有加以利用,所以对被控对象无镇定作用,本质上属于一种离线控制。因此笔者在开环ILC的基础上引入反馈,构成开闭环ILC。开闭环ILC的结构框图如图2所示,yd(t)为期望输出;yk(t)为实际系统输出。由图2可知,第k+1次控制系统的输入uk+1(t)由3部分组成:开环ILC控制提供的输入优化uff,k(t),闭环ILC控制提供的输入优化ufb,k+1(t),前一个迭代周期的输入uk(t)。因此开闭环P型ILC的学习律可表示为:
uk+1(t)=uk(t)+uff,k(t)+ufb,k+1(t)
其中,uff,k(t)=kopek(t)为开环控制学习律;ufb,k+1(t)=kcpek+1(t)为闭环控制学习律。
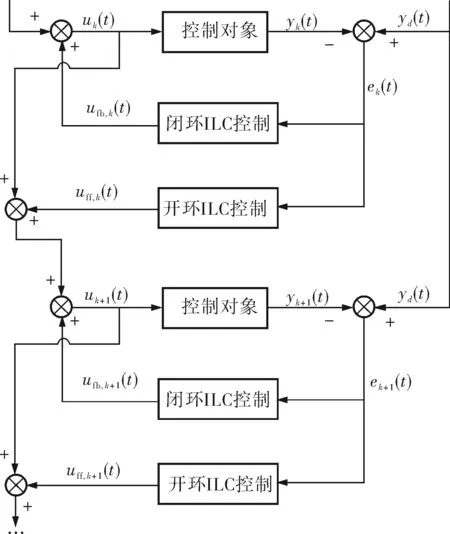
图2 开闭环ILC的结构框图
开闭环P型ILC控制算法既利用前一迭代周期的误差,也利用当前周期的输出误差作为迭代依据,经过多次迭代后位置误差可达到较小的范围[10],理论上性能会优于开环ILC控制。
2.3 基于神经网络优化的开闭环ILC控制
径向基函数(RBF)神经网络是一种三层前向网络,包含输入层、隐含层和输出层。由输入到输出的映射是非线性的,但隐含层空间到输出层空间的映射是线性的,从而加快了学习速度且避免了局部极小值问题[11]。
采用RBF网络对反馈部分进行在线整定优化,即对kcp进行优化。神经网络选为3-6-1结构,网络的输入向量X=[u(n),y(n),y(n-1)]T,径向基向量H=[h1,h2,…,h6]T,其中hj为常用的高斯函数[12],即:

根据梯度下降法,各参数的迭代算法如下:

wj(n)=wj(n-1)+Δwj(n)+α(wj(n-1)-
wj(n-2))
bj(n)=bj(n-1)+Δbj(n)+α(bj(n-1)-
bj(n-2))
cji(n)=cji(n-1)+Δcji(n)+α(cji(n-1)-
cji(n-2))
式中α——动量因子;
η——学习速率。
由梯度下降法得到kcp的调整量Δkcp为(η1为参数调整率):

基于神经网络优化的ILC控制过程:在第k次迭代运行过程中,输入信号加入被控对象中,产生输出信号,RBF神经网络根据实时误差和开环调整量不断改变kcp,加快系统的收敛速度,直到误差满足条件或此次迭代过程结束。
3 仿真实例与分析
永磁直线电机的仿真参数设置:m=1.97kg,fc=10N,fs=20N,B=82.22N·s/m,vs=0.01,b=8.5N,ω0=100rad/s,Ld=Lq=82.6mH,R=0.2Ω,极距τ=36mm,ψf=0.15287Wb,速度环的PI参数分别为50、80。直线电机的初始位置和期望初始位置相同,期望位置轨迹yd(t)=-20(15t4-6t5-10t3),t∈[0,1]。仿真时间1s,过程中采样周期设为0.001s,最大迭代次数20。
采用Matlab软件分别对开环P型ILC控制、开闭环P型ILC控制和神经网络优化的开闭环P型ILC控制算法的直线电机进行位置跟踪仿真。令开环ILC系数kp=20,开闭环ILC系数kop=20、kcp=25;同样令神经网络优化的ILC初始系数kop=20、kcp=25,神经网络的初始权值设为(-0.5,0.5)之间的随机数,学习速率η=0.15,参数调整率η1=0.5,动量因子α=0.05。位置最大跟踪误差随迭代次数的变化曲线如图3所示,不同迭代次数的最大误差绝对值见表1。
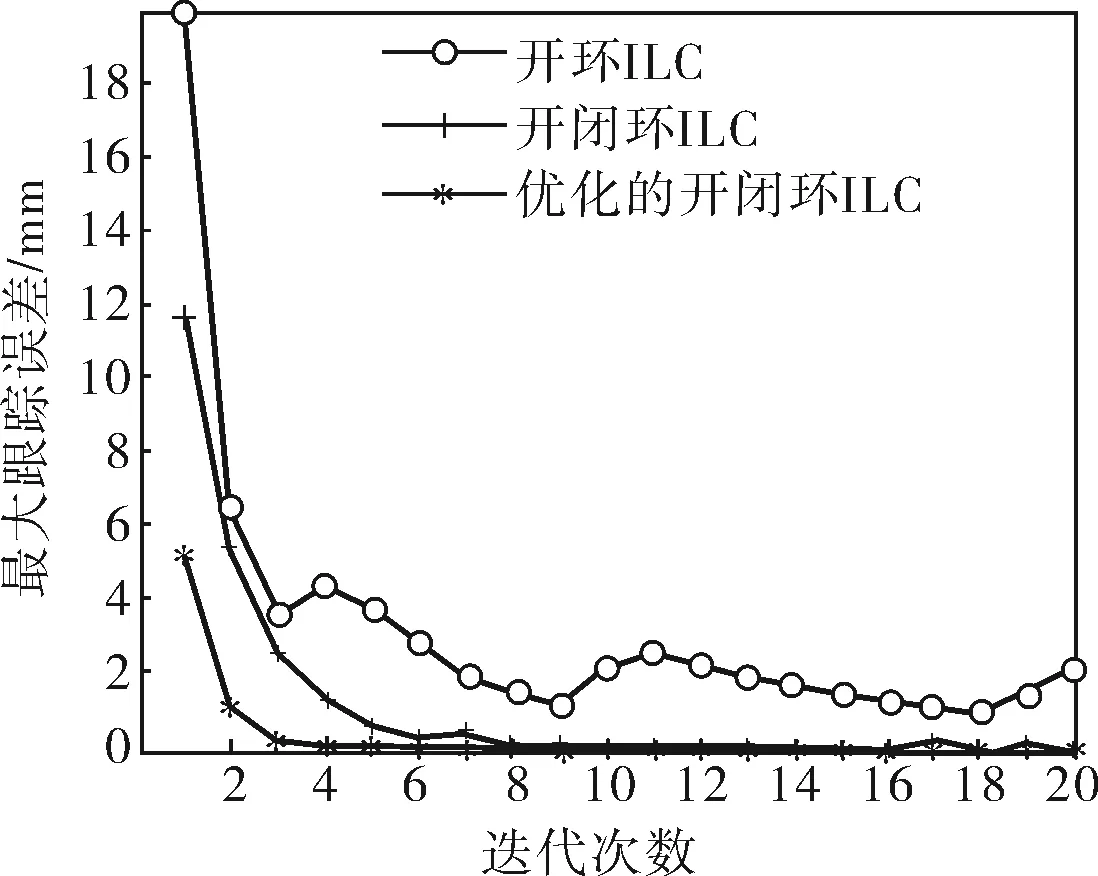
图3 位置最大跟踪误差随迭代次数的变化曲线

分析可以看出,随着迭代次数的增加,开闭环ILC控制的误差收敛速度相对于开环ILC控制有所加快,第20次迭代的最大位置误差下降为0.018 9mm;而神经网络优化的开闭环ILC控制误差的收敛速度进一步加快,第20次迭代的最大位置误差达到2.743 0×10-4mm,可见加入神经网络后误差变小且收敛速度明显加快。
4 结束语
笔者在开闭环ILC控制算法的基础上,结合RBF神经网络的优点,利用神经网络对ILC的学习律进行优化,并在直线电机模型上进行了位置控制仿真验证。仿真结果表明:相对于传统的ILC算法,神经网络优化的ILC算法可以保证学习过程能够更快地收敛于期望值,减少了ILC次数,提高了控制精度。
[1] 叶云岳.直线电机原理与应用[M].北京:机械工业出版社,2000.
[2] 李艳辉,张畅,周秀杰.一种新的FH迭代学习控制器设计[J].化工自动化及仪表,2014,41(7):754~758.
[3] 朱其新,陈向文.伺服系统的迭代学习控制[J].化工自动化及仪表,2011,38(3):252~256.
[4] 乔伟,郑恩让.基于ILC&EKF的PMSM转矩脉动最小化方法的仿真研究[J].化工自动化及仪表,2010,37(10):80~83.
[5] 王丹凤,李书臣,翟春艳,等.基于神经网络参数优化的迭代学习控制算法[J].河南科技大学学报(自然科学版),2008,29(6):42~44.
[6] 白敬彩,吴君晓.基于初态学习的非仿射非线性系统的开闭环PD型迭代学习控制[J].宁夏工程技术,2011,10(3):211~214.
[7] 张宏伟,余发山,卜旭辉,等.基于鲁棒迭代学习的永磁直线电机控制[J].电机与控制学报,2012,16(6):81~86.
[8] 师光洲.永磁直线伺服系统迭代学习控制研究[D].沈阳:沈阳工业大学,2014.
[9] 曹勇,蓝和慧,李华德.基于开闭环迭代学习位置调节的直线伺服系统[J].微电机,2010,43(2):54~57.
[10] 马珍珍,南余荣.基于迭代学习的永磁同步直线电动机的位置环控制[J].微特电机,2008,36(4):49~51.
[11] 葛锁良,杨旭玮,张亚东.RBF网络自整定PID控制在网络化控制系统中的应用[J].合肥工业大学学报(自然科学版),2011,34(10):1489~1492.
[12] 霍柳行,董爱华.基于RBF神经网络的PID在线整定及仿真[J].微计算机信息,2010,26(34):224~225.
