混合动力列车电源系统控制策略
2015-01-13杨继斌张继业宋鹏云陈彦秋
杨继斌, 张继业, 宋鹏云, 陈彦秋
(西南交通大学牵引动力国家重点实验室,四川 成都610031)
近年来,以节能、环保为目标的电动车辆、混合动力电动车辆应运而生[1],随着混合动力技术在公路车辆中的成熟应用[2-8],并在列车中的应用已逐渐发展起来[9-16]. 与传统列车相比,车载电源可以在无网区段为列车提供持续的动力,同时,在列车制动时可以实现再生制动能量的回收再利用.而混合动力列车电源系统的控制策略作为能量管理的核心,是提高整车动力性能、优化能源配置的关键.目前,大量文献研究了关于混合电源控制策略在汽车中的应用[1-7].在列车方面,国外的许多公司研究并开发了混合动力列车[9-13].国内学者也进行了相关研究,文献[14]分析了燃料电池混合动力列车的部分关键技术,并介绍了国内外混合动力列车的研究现状;文献[15]提出了蓄电池混合动力内燃机车的建模方法和能量管理策略;文献[16]介绍了由电网、蓄电池和超级电容供电的混合动力列车的结构,并提出了功率分配策略. 这些主要是对油电混合型、燃料电池混合型以及单超级电容型电源系统的研究.
通过研究混合电源系统在列车运行仿真过程中的应用,不但可以模拟列车运行过程[17],还可测试混合动力电源系统的充放电能力,研究混合电源系统的控制策略,对储能设备的选型及其配置具有重要的指导意义. 本文讨论对由电网、蓄电池和超级电容组成的电源系统在混合动力列车中的应用,首先建立混合电源系统模型,提出其控制策略,根据供电控制策略,分析混合动力电源系统与列车纵向动力学系统的耦合关系,计算列车加速度、电源系统的最大输出功率和牵引力.考虑系统中的耦合关系,提出一种基于本文电源系统控制策略的列车运行目标速度曲线计算算法,实现混合动力列车的计算仿真.
1 混合电源系统控制策略
1.1 混合电源系统结构及模型
混合电源系统的结构如图1 所示.
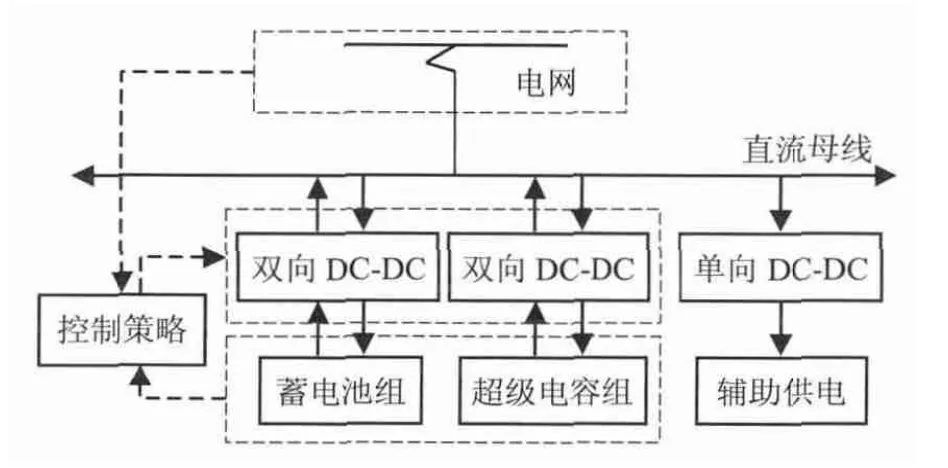
图1 混合电源系统结构Fig.1 System architecture of hybrid power
系统主要由蓄电池、超级电容和电网组成. 蓄电池和超级电容通过双向DC-DC 变换器接入直流母线工作. 该混合电源系统的特点是:通过双向DC-DC 变换器可实时控制蓄电池和超级电容的输入和输出功率,可控性较好;当电网工作时,可以为蓄电池和超级电容充电,列车的行驶里程较长;混合电源可进行大电流放电,提高列车的启动、加速和爬坡性能;制动时可以最大限度的回收再生制动能量,提高了能量利用率.
根据文献[1]建立蓄电池和超级电容模型.
蓄电池荷电状态为

式中:
i 为电池电流;
Q(i)为对应于电流i 的蓄电池安时容量;
SB,ini为初始荷电状态值.
蓄电池供给的能量为

式中:
VB(τ)为电池端电压;
i(τ)为蓄电池电流.
超级电容能量状态为

式中:
VC为随放电电流变化的超级电容端电压;
VC,R为超级电容的额定电压.
超级电容供给的能量为

式中:
C 为超级电容电容量.
1.2 混合电源系统控制策略
在有网区,电网通过三相交流逆变器给电机供电,为列车提供牵引功率,并通过直流母线给蓄电池和超级电容充电.在无网区需蓄电池和超级电容共同提供列车所需的牵引功率,此时,为保证列车的动力性能,应充分发挥蓄电池比能量高、超级电容比功率高的特性,延长蓄电池的寿命,最大限度的回收再生制动能量,需要制定由蓄电池和超级电容组成的混合电源的控制策略.
记:PH(x)为混合电源系统的输出功率;
P*
n (x)为列车牵引运行的期望输出功率;
x 为列车运行位置.
当混合电源系统放电时,
PH(x)>0, P*
n (x)>0;当混合电源系统充电时,
PH(x)<0, P*n (x)<0;当混合电源系统不工作时,
PH(x)=0.
设:蓄电池放电截止时SB的阈值为SB,0;充电截止时SB的阈值为SB,m.
设:超级电容放电截止时SC的阈值为SC,0;充电截止时SC的阈值为SC,m.
混合电源系统的控制策略及输出功率计算流程如图2 所示.图2 中:PB、PC分别为电池和超级电容输出功率,放电时为正,充电时为负;PH,1为混合电源放电时的最大输出功率,PH,1=max{PH};PH,2为混合电源充电时的最大输入功率,PH,2=max{-PH},其中:VB、VC分别为蓄电池和超级电容的放电电压;iB,up、iC,up分别为蓄电池和超级电容的最大放电电流;iB,d、iC,d分别为蓄电池和超级电容的最大充电电流.
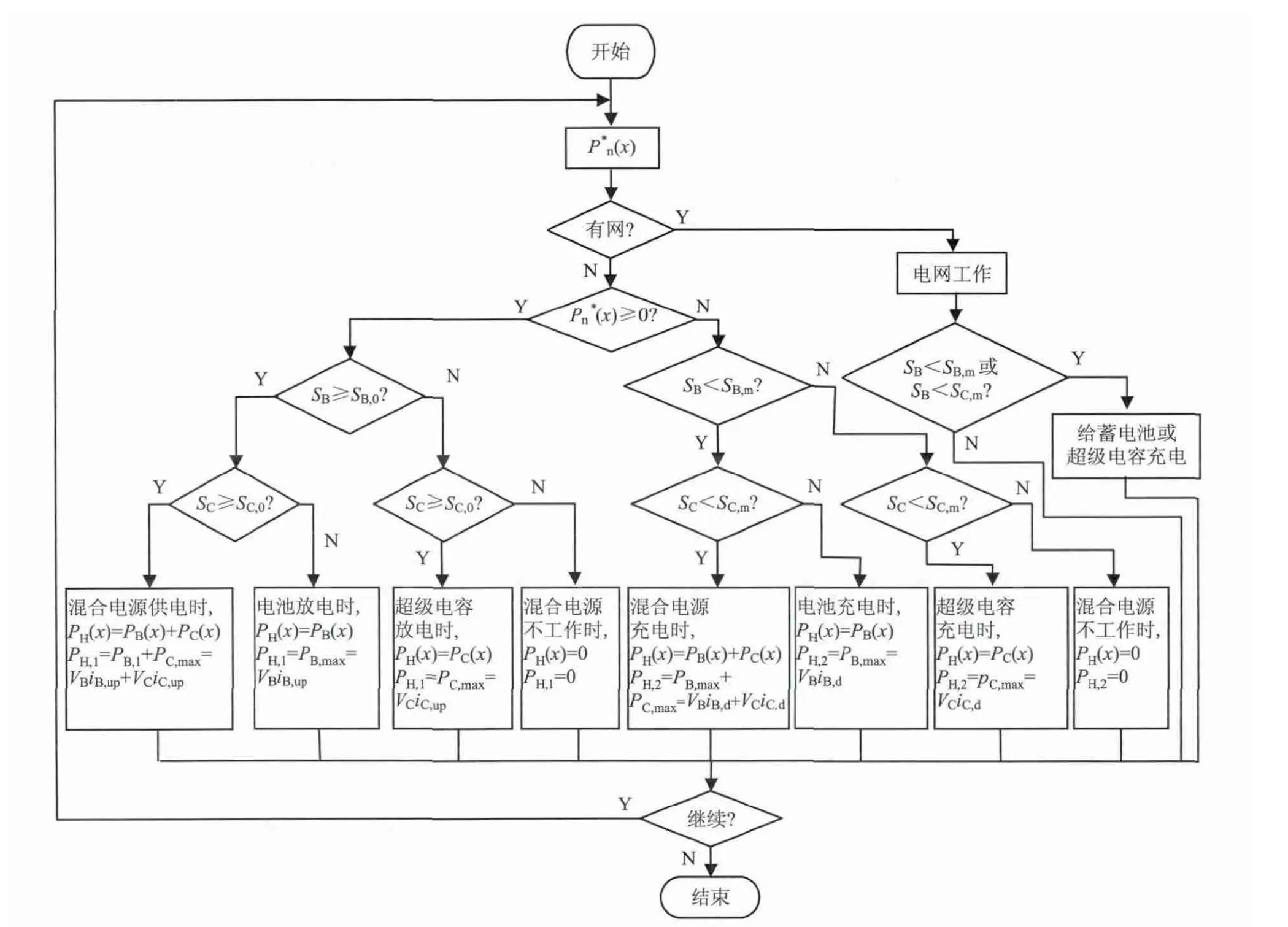
图2 混合电源的控制策略及输出功率计算Fig.2 Calculation flowchart of control strategy and output power of hybrid power
2 混合电源系统与列车纵向动力学系统的耦合分析
传统列车只由电网供电,在列车牵引运行过程中,列车可以最大能力加速至目标速度,但列车制动过程中,由于列车回收制动能量的能力有限,列车再生制动受到一定的限制.当混合电源系统的电网不供电时,为防止蓄电池和超级电容的过充和过放,延长其工作寿命,列车运行过程中,对蓄电池和超级电容的功率进行一定限制,导致列车加速度受到混合电源所提供的最大功率的约束.列车制动过程中,混合动力电源系统通过充电来回收能量,以混合电源系统的最大能力对制动能量进行回收.
列车运行目标速度曲线如图3 所示.
由图3 可知,在A 点之前,列车以最大加速度加速;A 点处,速度v=v(x),此时,混合电源系统提供的功率不能满足列车以最大能力加速,其加速能力受到一定的约束,所以约束A 点处的加速度,使加速度a(x)减小,以保证混合电源系统安全可靠工作,列车的安全平稳运行.
2.1 列车运动方程描述
列车在轮周牵引力、运行阻力、制动力和惯性力作用下的运动方程为

式中:
mD为包含回转质量在内的列车总质量;
Ft(x)为列车牵引力;
Fb(x)为制动力;
wf(x)为列车运行所受的单位阻力之和.
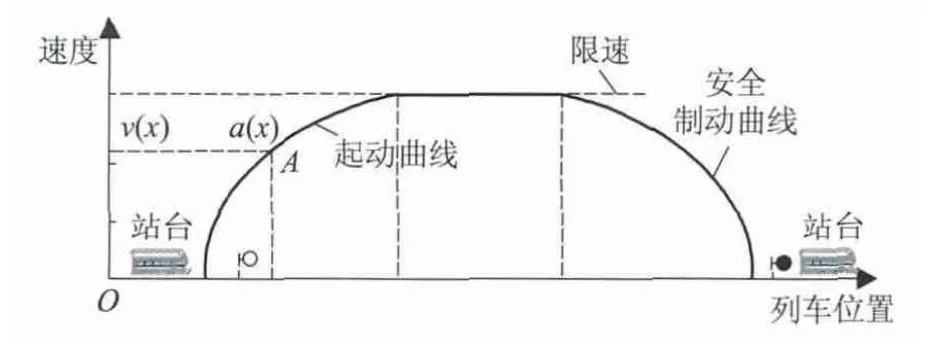
图3 列车运行目标速度曲线Fig.3 Target speed profiles of automatic train operation
2.2 系统耦合分析与计算
根据混合电源系统控制策略、功率计算以及列车运动方程的描述,耦合分析与计算各工况下混合动力电源系统与列车纵向动力学系统.
列车运行中,设:
2.2.1 牵引工况
牵引工况下,Fb(x)=0,列车所需加速度为

列车牵引运行中所需的期望功率为

混合电源系统提供的最大牵引力为

式中:η1为传动系统效率.
由式(6)得列车最大加速度为

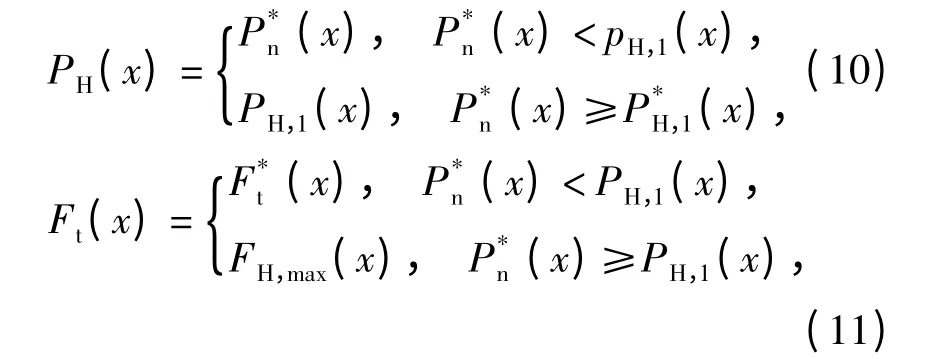
列车牵引工况下,混合电源系统输出功率、列车牵引力和列车加速度分别为

2.2.2 制动工况
制动工况下,Ft(x)=0,列车加速度为

列车制动产生的功率为

混合动力系统产生的再生制动力为

式中:η2为混合电源能量回收的效率.
由式(13)得到列车最大加速度为

式中:Fb,max(x)为列车最大制动力,

其中:Fb,m(x)为机械制动力.
列车制动工况下,混合电源回收功率、列车实际制动力和列车加速度分别为

3 目标速度曲线计算算法
根据复杂的列车运行条件,生成目标速度曲线,控制列车按照目标速度曲线运行,使得列车运行时能够满足准点、精确停车以及节能运行等目标要求.
由于混合动力列车电源系统的输入输出功率有限,考虑系统中的耦合关系,基于1.2 节混合电源系统的控制策略,提出一种针对本文提出的混合动力列车的目标速度曲线计算算法.算法的核心思想是从理想状态出发,计算目标速度曲线;逐步考虑各种限制条件,修改曲线.
设计的目标速度曲线计算算法如图4 所示.图4 中:Fc(x)为列车所受合力,由式(6)计算;v'(x)为线路土建限速;fB(x)、fC(x)分别为蓄电池和超级电容可提供的牵引力;E*C(x)为超级电容的期望输出能量;aB(x)为蓄电池供电时为列车提供的加速度;在计算中,根据蓄电池的放电特性,将蓄电池的功率估算为平均功率.

图4 目标速度曲线计算算法流程图Fig.4 Flowchart of the algorithm for calculating target speed profiles
4 仿真分析
4.1 仿真参数及线路数据
利用MATLAB/Simulink 仿真软件系统建模,模拟列车从56 m 位置运行至2 100 m 位置全程的运行情况,其列车主要参数如表1 所示,仿真线路数据如图5 所示.
单节列车配置一套混合电源箱,超级电容和蓄电池的配置为“2C1B”,即两组超级电容和一组蓄电池组成,混合电源箱的主要参数如表2 所示.
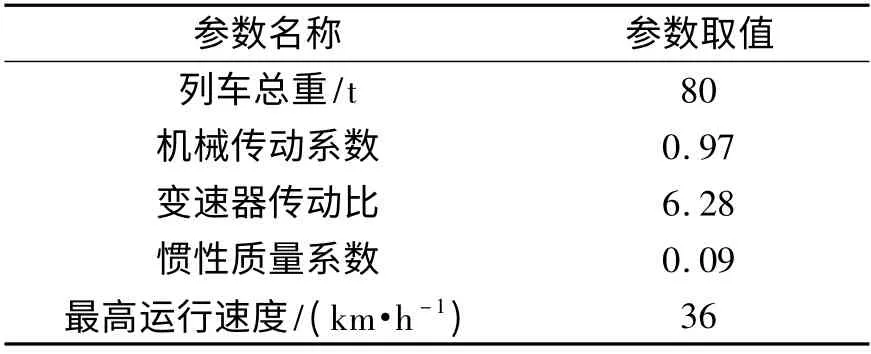
表1 列车主要参数Tab.1 Main parameters of the train
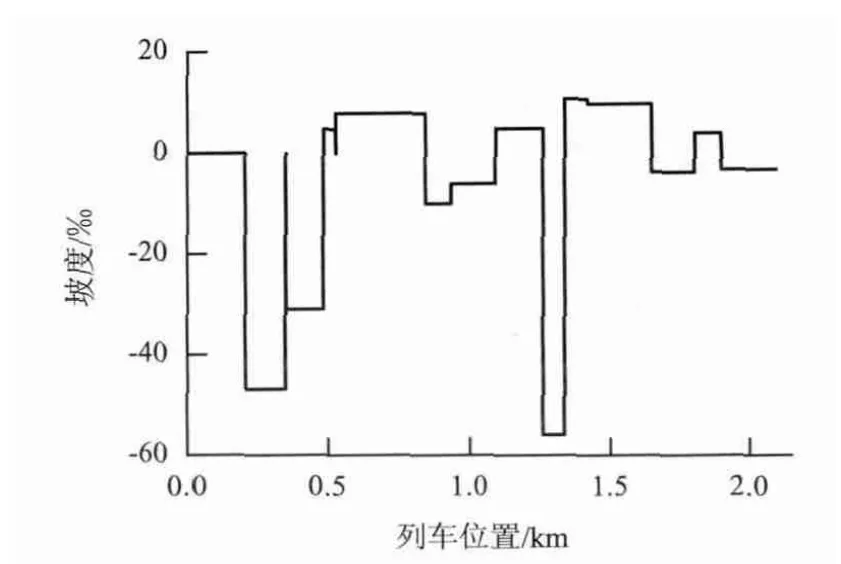
图5 线路仿真数据图Fig.5 Track data of simulation
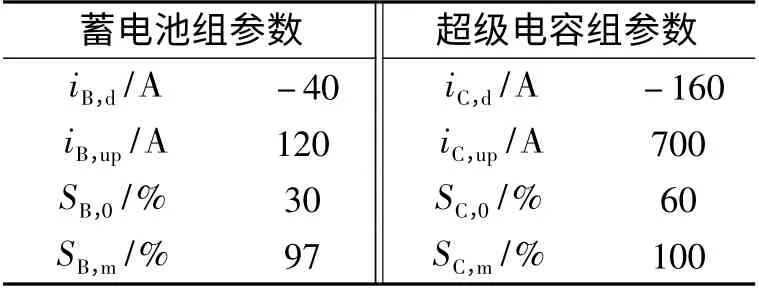
表2 混合电源主要参数Tab.2 Main parameters of the hybrid power
4.2 仿真结果
根据本文构建的列车混合电源系统控制策略和算法,进行混合动力列车的运行仿真实验,其仿真结果如图6 ~8 所示.
图6 为列车自动控制运行仿真中的速度曲线,图中,实线为根据图4 算法计算得到的期望目标速度曲线.在800 ~920 m 的区段由于弯道过小,对列车速度进行曲线限速. 从图6 可以看出,列车运行仿真的速度曲线能够完全跟踪期望目标速度曲线.
图7 为列车运行速度曲线对应的电池SB和超级电容SC曲线.根据系统控制策略,列车下坡制动和停车制动时,超级电容和蓄电池同时充电进行制动能量的回馈,列车产生的制动能量为4. 72 ×106J,蓄电池回收的制动能量为0.29 ×106J,超级电容回收的制动能量为1.65 ×106J,混合电源回收了41%的制动能量.起动牵引和上坡时,需求功率较大,电池和超级电容按需求进行最大能力的放电.在940 ~1 300 m 的区段加设电网,对蓄电池和超级电容充电,蓄电池和超级电容的容量曲线上升.在1 340 ~1 600 m 的区段,由于坡道过大,超级电容快速放电,其SC值减小.
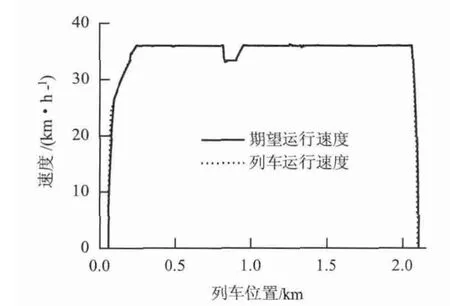
图6 列车运行速度曲线Fig.6 Automatic train operation speed profiles
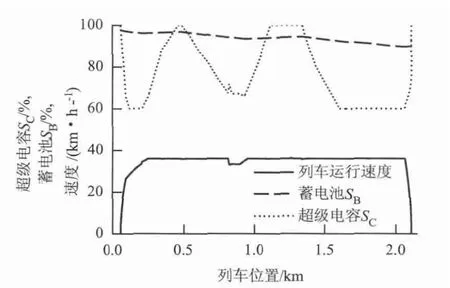
图7 列车运行速度曲线及对应的蓄电池和超级电容的容量曲线Fig.7 Automatic train operation speed profiles and capacities of batteries and supercapacitors
图8 为列车运行仿真的加速度曲线. 结合图7、8 可以看出,在列车加速至25 km/h 左右时,列车还未达到最大运行速度,而由于混合电源系统的功率约束,加速度明显降低.
仿真结果表明,列车运行全线2 044 m 的仿真需时间220 s,电池SB为86 %,超级电容SC为100%,列车能够跟踪期望目标速度曲线自动运行,仿真过程没有超速. 因此,电源系统控制策略及目标速度曲线计算算法能够满足列车运行仿真的需求.
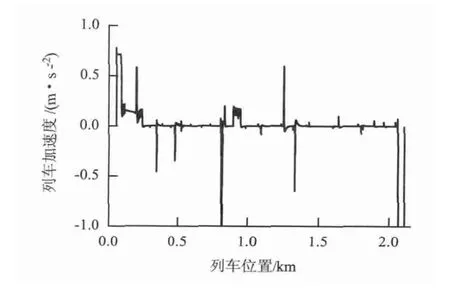
图8 列车运行加速度曲线Fig.8 Automatic train operation acceleration profiles
5 结 论
(1)根据构建的混合电源模型提出了电源系统的控制策略.仿真表明,该控制策略下,列车运行完全程时蓄电池的荷电状态为86%,超级电容能量状态为100%,混合电源能够充分发挥蓄电池高比能量和超级电容高比功率的特性,达到列车运行的动力性能指标.
(2)通过分析混合电源系统与列车纵向动力学系统的耦合关系,给出了一种基于该控制策略的列车运行目标速度曲线的计算算法,防止了蓄电池和超级电容的过充和过放,保证列车能够安全可靠的运行.
(3)混合电源回收了41%的制动能量,其中超级电容回收了约35%的制动能量.
[1] EHSANI M,GAO Yimin,EMADI A. Modern electric,hybrid electric,and fuel cell vehicles fundamentals,theory,and design[M]. Second Edition. Boca Raton:CRC Press,2009:375-396.
[2] JALIL N,KHEIR N A,SALMAN M. Rule-based energy man-agement strategy for a series hybrid vehicle[C]∥Proceedings of the American Control Conference. Albuuerque:IEEE,1997:689-695.
[3] JOHANNESSON L,ASBOGARD M,EGARDT B.Assessing the potential predictive control for hybrid vehicle power train using stochastic dynamic programming[J]. Intelligent Transportation Systems,2007,8(1):71-83.
[4] MILLER J M,DESHPANDE U,DOUGHERTY T J,et al. Power electronic enabled active hybrid energy storage system and its economic viability[C]∥IEEE Applied Power Electronics Conference and Exposition.Washington D. C.:IEEE,2009:190-198.
[5] 陈平录,俞小莉,聂相虹,等. 并联型气动燃油混合动力汽车控制策略[J]. 浙江大学学报,2011,45(2):348-353.CHEN Pinglu,YU Xiaoli,NIE Xianghong,et al.Control strategy for parallel hybrid air-fuel vehicle[J].Journal of Zhejiang University,2011,45(2):384-353.
[6] 张丹红,汪红卫,刘开培,等. HEV 车载复合电源系统控制策略优化研究[J]. 电源技术,2012,36(5):650-655.ZHANG Danhong,WANG Jiangwei,LIU Kaipei,et al.Optimization of hybrid power system control strategy for HEV[J]. Joural of Power Source,2012,36(5):650-655.
[7] 肖仁鑫,李涛,秦颖,等. 并联式混合动力汽车能量管理的马尔可夫决策[J]. 西南交通大学学报,2012,47(6):982-988.XIAO Renxin,LI Tao,QIN Ying,et al. Markov decision process for the energy management of parallel hybrid vehicles[J]. Journal of Southwest Jiaotong University,2012,47(6):982-988.
[8] 郭春林,甄子健,武力,等. 电动汽车发展前景与关键因素分析[J]. 汽车工程,2012,34(9):852-858.GUO Chunlin,ZHEN Zijian,WU Li,et al. Prospects and key factors analysis of electric vehicles development[J]. Automotive Engineering, 2012,34(9):852-858.
[9] MILLER A,HESS K,BAMES D. System design of a large fuel cell hybrid locomotive[J]. Journal of Power Sources,2007,173(2):935-942.
[10] FUJII T,TERAYA N,OSAWA M. Development of a NE train[J]. Japanese Railway Engineering,2006,156(4):62-70.
[11] OOSTRA J,DUNGER W. Hybrid-rangier locomotive:technik und anwendungen[J]. ZEV Rail Glasers Annalen,2009,133(9):365-369.
[12] YEDAVALLI K,LIPPING G,ZINGER D S. Simple control system for a switcher locomotive hybrid fuel cell power system[J]. IEEE Transaction on Industry Applications,2011,47(6):2384-2390.
[13] JAAFAR A,AKLI C R,SARENI B,et al. Sizing and energy management of a hybrid locomotive based on flywheel and accumulators[J]. IEEE Transcations on Vehicular Technology,2009,58(8):3947-3958.
[14] 陈伟荣,钱清泉,李奇. 燃料电池混合动力列车的研究现状与发展趋势[J]. 西南交通大学学报,2009,44(1):1-6.CHEN Weirong,QIAN Qingquan,LI Qi. Investigation status and development trend of hybrid power train based on fuel cell[J]. Journal of Southwest Jiaotong University,2009,44(1):1-6.
[15] 张昕,田毅,张欣. 混合动力机车动力系统建模及能量管理研究[J]. 铁道学报,2012,34(5):20-25.ZHANG Xin,TIAN Yi,ZHANG Xin. Modeling and energy management strategy of hybrid locomotive[J].Journal of the China Railway Society,2012,34(5):20-25.
[16] 陈彦秋,张继业,宋鹏云,等. 混合动力列车运行控制的研究[J]. 铁道学报,2013,35(8):25-28.CHEN Yanqiu,ZHANG Jiye,SONG Pengyun,et al.Study on operation control of hybrid electric train[J].Journal of the China Railway Society,2013,35(8):25-28.
[17] 铁道部标准计量研究所. TB/T 1407—1998 列车牵引计算规程[S]. 北京:中国标准出版社,1998.