直角坐标型钢坯标示机构的设计与分析
2015-01-08金丽媛
傅 旻,金丽媛,唐 鑫,张 文
(天津科技大学机械工程学院,天津 300222)
在钢坯生产过程中,为实现质量追踪,检测钢坯缺陷产生原因,消除混坯事件的发生,需对钢坯进行在线标示[1-2].常用钢坯标示方法主要以冲印式和电弧喷涂式为主.冲印式标示的特点在于:钢坯表面不需任何处理,字符一次成型,可永久保存;因为在标示过程中字模高频次接触红热钢坯,对字模的材质及成型性能要求较高,余热易通过字模向标示系统内部传递,给控制系统造成安全隐患[3].电弧喷涂式标示的特点在于:标示机构不与钢坯接触,避免了钢坯余热对控制系统的不利影响,字符大小可调,喷涂前需除去钢坯氧化皮;受其工作原理限制,字符笔画宽度大,不适用于小字符标示[4],因丝材熔点较低,标示完成后,钢坯不宜进行后续热处理.可见,常用标示方法不能同时满足小规格钢坯端面的多字符标示及后处理需求.
本文提出一种新的钢坯端面标示方法,即通过高能束枪对钢坯表面进行刻蚀.高频电弧将电极间的空气离子化,当喷嘴移动至工件表面时,高压气体将极细的弧柱沿喷嘴吹出,切口处的材料迅速融化,借助高压气流将熔融金属吹出,形成轨迹[5].此方法的优点在于,枪体不与钢坯接触,采用去除材料的方式,后续热处理工艺对标示内容无影响;不需处理氧化皮,标示深度可达5,mm,字符大小可调,笔画宽度细,可实现小范围内的多字符标示.
1 标示机构设计
1.1 标示机构的实现形式
标示机构是实现高能束标示的载体,其动作的实现过程直接影响标示效果.因直角坐标型工业机器人具有位置精度高、控制无耦合、避障性好等特点,综合考虑设备运动要求及成本,选用直角坐标型工业机器人的结构形式进行设计[6],如图1 所示.图1 定性描述了机构沿点Pa移至点Pb时,各轴轨道的运行情况.因滚珠丝杠摩擦力小,响应迅速,动作安全可靠,传动效率高达90%,以上,故选用滚珠丝杠作为直线驱动机构[7].伺服电机驱动X、Y、Z 三个方向滚珠丝杠协调运动,带动枪体按预定轨迹完成包括数字、字母、特殊字符在内的符号成型,将相关信息标示至钢坯表面.

图1 直角坐标型机器人示意图Fig.1 Sketch of Cartesian coordinating robot
标示机构中的每个杆件可视为刚体,给定刚体上任一点的位置和姿态,则刚体在空间上可用唯一的位姿矩阵进行描述:设坐标系{i}和坐标系{j}具有相同的姿态,但坐标原点不重合,在选定的坐标系{j}中,对标示机构工作空间内一点P(x,y,z),沿矢量[pij]=px[i]+py[j]+pz[k ]平移,其中 px、py、pz分别为点P 在坐标系{j}中的坐标分量,[i]、[j]、[k]分别为直角坐标系中X、Y、Z 坐标轴的单位矢量,可得到用于描述杆件平移变换的齐次坐标变换矩阵

根据上述坐标变换原理,将各项平移组合起来,即可实现复杂的坐标变换[7].因为标示机构工作时与红热钢坯(温度为600,℃左右)间的距离小,设备中的电气元件易受辐射热影响,为保证控制系统的稳定性,在直角坐标型结构的基础上,将标示机构设计成“鹅颈式”悬臂结构.标示字符采用笔画式(类似书写形式),相比冲印式的单个字符成型时间更长,要求机构短时间内快速响应,在频繁的加减速运动中,满足稳定性要求.
1.2 标示机构模型的建立
标示机构由包括三个方向的滚珠丝杠及对应的伺服电机、高能束枪体和“鹅颈式”悬臂组件等组成.根据现场工况以及字符大小、个数、行数等要求选择适当的丝杠行程,综合工作空间、标示区域、组件运动行程等因素,初步设计标示机构的结构形式如图2 所示.X、Y 向的丝杠用于实现枪体沿钢坯端面的运动.基于高能束枪体的工作特性,枪体距钢坯的距离应控制在20,mm 以内;钢坯经切割后,端面质量的一致性较差,常出现一定的倾角(一般不大于3°),故Z 向丝杠运动用于补偿因断面倾斜等因素造成的距离差,以保证标示的正常进行.

图2 标示机构结构图Fig.2 Configuration schema of the marking mechanism
2 标示机构模态分析及改进
2.1 模态分析
由于高能电弧的弧柱较细,标示字符笔画宽度窄,加之标示机构组成相对复杂,在每个字符的标示中丝杠都需经过“加速—匀速—减速”阶段.为确定标示机构的固有频率,避免共振现象的发生,需要对机构模态进行分析.模态分析是对结构固有频率和振型的描述,其实质是求解具有有限个自由度的无阻尼、无外载状态下,运动方程的模态矢量(忽略结构阻尼对模态频率及振型的影响)[8].
为便于分析,在保证结构特性的基础上对模型作简化:除去结构中的螺纹、小圆孔、狭小面、小凸台、圆角等对机构性能无明显影响的特征,以利于网格划分;假定结构中涉及的螺栓连接均为刚性连接.
选用ANSYS Workbench 默认的分块Lanczos 法特征值求解器.由振动理论可知:低阶模态在系统机械振动过程中起主要作用,较高阶模态振型对系统影响不大,故仅分析模型前六阶模态[9].
将简化后的UG 模型导入至Workbench 工作界面,通过定义材料属性和单元类型、划分网格、施加约束、模态分析等操作,得出模型的前六阶振型.图3 给出了对标示效果影响明显的一阶和五阶振型图.表1 给出了前六阶的模态分析结果及振型说明.
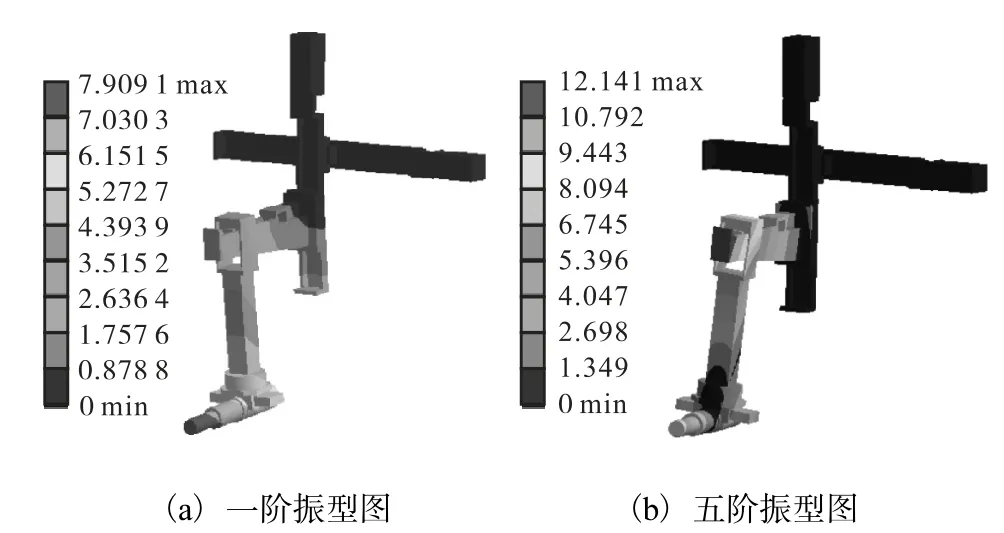
图3 标示机构的部分模态振型图Fig.3 Partial modal shapes of the marking mechanism

表1 模态频率与振型描述Tab.1 Mode frequencies and shapes
由模态分析可知:标示机构前六阶多为局部模态,涉及了X、Y、Z 方向的摆动,扭转和弯曲;标示机构的最低模态频率为16.855,Hz,而伺服电机在3 个方向上的驱动频率分别为732、1,173、199,Hz,远大于机构最低固有频率,不存在共振危险;但枪体摆动幅度明显,机构的刚性还需进一步提升.
2.2 结构改进
对标示机构采取了如表2 所示的改进措施.改进后的结构形式见图4.
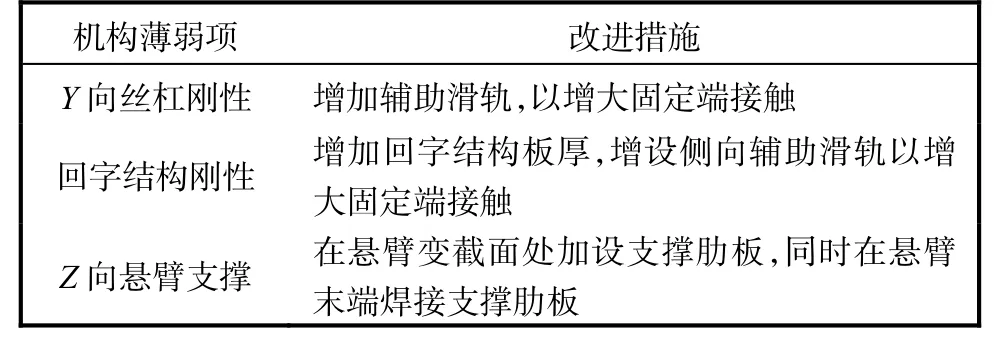
表2 结构改进措施Tab.2 The improved structure
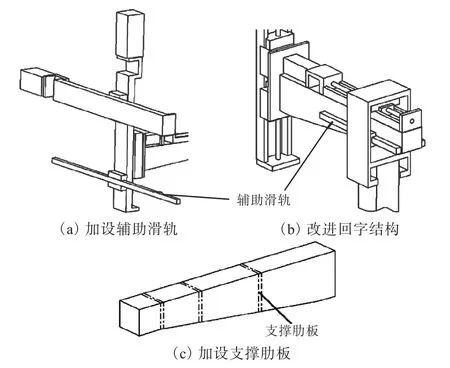
图4 改进结构示意图Fig.4 Sketch of the improved structure
对改进后的结构进行模态分析,部分振型见图5.改进后模型的前六阶模态频率见表3.在前六阶模态振型中整体模态占多数,模型最低频率由16.855,Hz 提高至37.592,Hz,提高123.03%,,在不引起共振的前提下,结构刚性显著提高.通过振型对比可知:辅助滑轨增加了Y 向丝杠的固定面,摆动现象得到明显改善,悬挂部分的摆动和弯曲情况有所缓解,改进方案对设备刚度贡献明显.
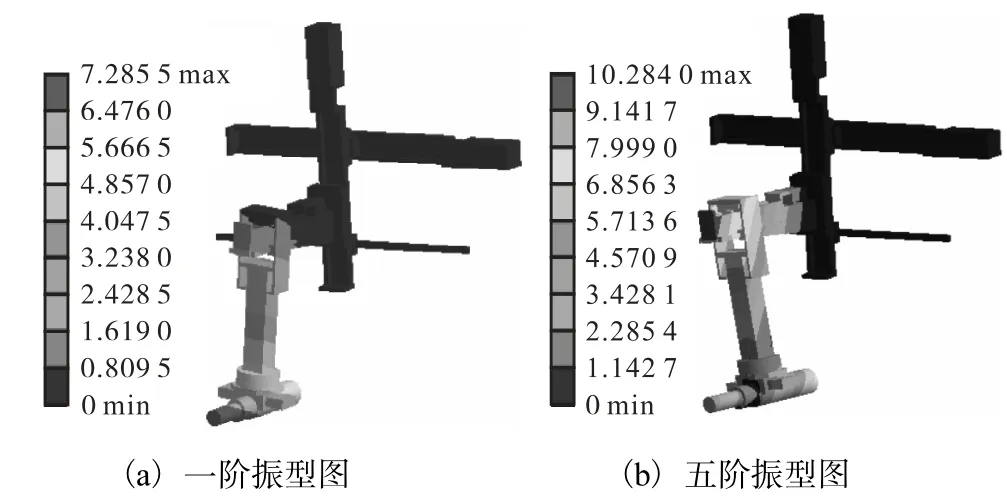
图5 优化后标示机构的部分模态振型图Fig.5 Partial modal shapes of the improved marking mechanism
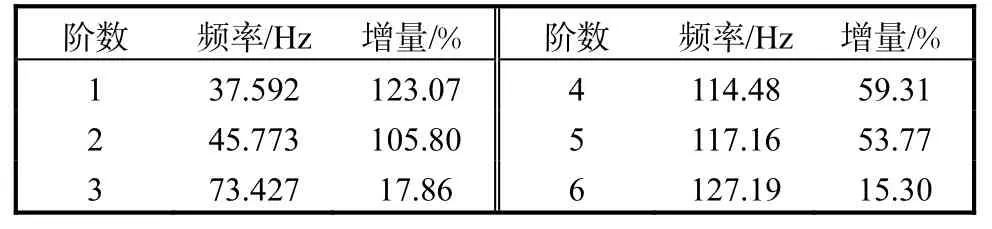
表3 改进前后的模态频率对比Tab.3 Comparison of mode frequencies before and after improvement
两种方案下样机的标示效果见图6.可以看出:原方案的字符有明显抖动的现象,弧线段不圆滑,机构虽能完成标示内容,但字符笔画失稳严重,不美观;改进方案的笔画流畅、工整,改善效果明显.
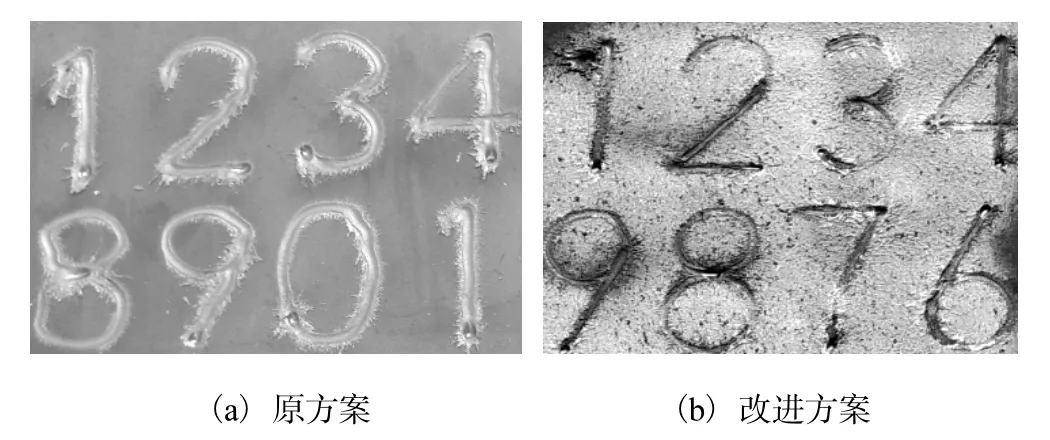
图6 改进前后的标示效果对比Fig.6 Marking effect of the original and improved structure
3 结语
在对比不同标示方法基础上,本文采用高能束枪体设计了直角坐标型钢坯在线标示机构,能够满足小规格钢坯标示多字符以及热处理后字符清晰可辨的设计要求.利用ANSYS Workbench 软件对标示机构进行模态分析可知,机构不会发生共振,但机构摆动幅度明显,对标示不利.结构改进后标示机构的固有频率提高,标示效果明显改善.
[1]旻傅,张恒,潘存海.新型钢坯电弧喷号机的研制[J].天津科技大学学报,2012,27(1):57-61.
[2]旻傅,宗庆勋.小方坯端面标示设备写字机构的动态特性分析[J].天津科技大学学报,2014,29(2):54-59.
[3]陈铭.热钢坯端面打号机关键技术的研究[D].杭州:浙江大学,2008.
[4]张志胜.热钢坯电弧喷涂标记系统优化研究[D].杭州:浙江大学,2010.
[5]吴子健.热喷涂技术与应用[M].北京:机械工业出版社,2006.
[6]肖南峰.工业机器人[M].北京:机械工业出版社,2011.
[7]张铁,谢存禧.机器人学[M].广州:华南理工大学出版社,2003.
[8]曹妍妍,赵登峰.有限元模态分析理论及其应用[J].机械工程与自动化,2007(1):73-74.
[9]宫文峰,黄美发,张美玲,等.基于ANSYS Workbench的倒装键合机钣金件模态分析与实验[J].机械设计,2014,31(8):101-105.
