纯电动汽车制动力分配策略的建模与仿真
2015-01-06姜建伟易吉良贺正芸周述庆
姜建伟,易吉良,贺正芸,周述庆
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
纯电动汽车制动力分配策略的建模与仿真
姜建伟,易吉良,贺正芸,周述庆
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
为了在保证车辆制动安全的同时提高能量回收效率,在分析了常用制动力分配策略基础上,设计了一种基于模糊逻辑控制的制动力分配策略,即根据制动强度的大小采取不同的制动力分配曲线,利用Matlab/Simulink建立了制动控制仿真模型并将其嵌入到ADVISOR软件中进行仿真分析。结果表明,本文设计的制动策略在制动能量回收效率方面优于ADVISOR软件自带的制动控制策略。
电动汽车;制动力分配;模糊控制;ADVISOR
0 引言
电动汽车区别于传统燃油汽车的关键特性之一就是具有再生制动系统。所谓再生制动就是当汽车在制动或减速过程中,将车辆的部分动能或势能转化为电能储存在蓄电池中,当车辆再次加速或者启动时,又将回收的能量提供给车辆行驶,实现了制动能量的回收利用,从而提高了能量利用效率和增加了汽车续驶里程[1-3]。
目前国内对再生制动的研究主要集中在控制策略、回收效率、仿真模型建立和测试平台四个方面,而其中控制策略研究中的制动力分配是一个研究热点。参考文献[4]提出了三种典型的制动力分配策略,并针对三种分配策略在特定道路工况下进行仿真分析。参考文献[5]将模糊控制和理想制动力分配相结合,提出一种基于模糊逻辑控制的复合制动力分配策略,并在道路循环工况下将此分配策略与ADVISOR分配策略仿真对比,结果表明该分配方法在保证制动安全的同时可以有效提高能量回收效率。参考文献[6]提出一种基于欧洲经济委员会制动法规(ECE,Economic Commission of Europe safety regulations)的前后轮制动力分配策略,根据制动强度和电机所能提供的最大再生制动力选择合适的分配关系达到合理分配总制动力。现有的制动力分配策略主要根据车速、理想制动力分配曲线和ECE制动法规来进行制动力分配,这些策略都难以同时兼顾到制动安全性与能量回收效率。
本文以前轮驱动的纯电动汽车的为研究对象,以提高制动能量回收效率为目标,以再生制动控制策略即制动力分配为研究内容,综合考虑制动稳定性和能量回收效率,提出一种基于模糊控制的最大能量回收控制策略,并在ADVISOR软件中进行仿真分析,仿真结果表明,本文所设计的控制策略在保证汽车制动安全和稳定前提下,提高了制动能量的回收效率。
1 传统制动力分配策略

图1 汽车制动受力分析图Fig. 1 forces acting on vehicle braking
车辆在制动过程中受力情况如图1所示,图中忽略了空气阻力和滚动阻力矩以及旋转质量减速时的惯性力矩。
通常在汽车制动过程中会出现三种情形,即:1)前、后轮同时抱死;2)前轮先于后轮抱死;3)后轮先于前轮抱死 [6,7]。
情形1)属于稳定工况,这种前、后轮分配曲线称为理想制动力分配曲线,简称I曲线。其表达式为:

式中Fbf、Fbr分别表示为前、后轮总制动力,单位:N;a、b、L、hg分别表示车辆质心到前轴、后轴中心线的距离、车轴距、车辆重心高度,单位:m;m为汽车的质量,单位:kg。
情形2)同样也属于稳定工况,但前轮先抱死会导致汽车失去转向能力,这种前、后轮制动力分配曲线简称为f曲线。其表达式为

情形3)是一种不稳定的工况,后轮提前抱死会导致车辆发生侧滑危险,所以应该避免发生。这种制动力分配曲线简称为r曲线。其表达式为:

另外,为了确保汽车制动安全,同时保证较好的利用道路附着系数,联合国经济委员会制定了ECE R13制动法规,规定明确要求,当制动强度在0.2~0.8之间时,制动力强度和附着系数的关系必须满足:z ≥ 0.1+0.85(φ‒0.2),并且后轮的利用附着系数曲线一定要在前轮的利用附着系数曲线之下。对于前轮汽车而言,ECE制动法规规定了最小后轮制动力范围曲线,即M曲线。其方程表达式为:

根据公式(1)~(4),将汽车的相关参数代入上述公式中,通过matlab作图可以得到前、后轮制动力分配曲线如图2所示,图中的I曲线、f曲线组、r曲线组、M曲线分别表示理想制动分配曲线、前轮先于后轮抱死曲线组、后轮先于前轮抱死曲线组、ECE制动力分配曲线。

图2 前轴制动力和后轴制动力关系图Fig. 2 Braking forces in the front and rear wheels
根据理想制动力分配曲线进行制动力分配,车辆可以有效利用道路附着系数,制动效果较好,但回收能量有限;根据ECE法规分配曲线进行分配,可以最大化地回收制动能量,但控制系统非常复杂难以实现;而f曲线组是在不同的道路附着条件下前轮抱死时采取的制动力分配方法,r曲线组由于本身是种不稳定状态,不予以考虑。总之,单一的按照某一种分配曲线去进行制动力分配,是很难同时保证制动安全和回收效率。
2 前轮最大制动力分配策略

图3 最大制动力分配曲线图Fig. 3 maximum distribution curve of Braking forces in the front and rear wheels
为克服三种传统制动力分配策略的不足,本文设计了一种前后轮制动力分配控制策略,它可以使得前轮制动力实现最大化。图3-11中,曲线OABCD为本文设计的制动力分配曲线,其中A点为M曲线与横轴的交点,B点为M曲线与f曲线的交点,C点为f曲线与I曲线的交点,根据公式(4),令Fbr=0并代入车辆的相关参数值,可得到A点坐标为(2462,0),对应A点的制动强度为0.2。B点坐标可由公式(4)和公式(2)联立求出,从而得到B点坐标为(5613,392),对应B点的制动强度为0.53。C点是理想制动曲线上的点,它的制动强度与道路附着系数大小相等,所以C点的制动强度为0.7。总结以上分析,本文提出的制动力分配策略具体规则为:
制动强度z ≤ 0.2,车辆所需的制动力很小,可由前轮再生制动力提供制动。
制动强度0.2 < z ≤ 0.53,按照ECE制动法规要求的M曲线分配。
制动强度0.53< z ≤ 0.7,前后轮沿着道路附着系数φ为0.7的f曲线进行分配。
制动强度z > 0.7,在制动强度较大时,前、后轮制动力沿I曲线进行分配。
总之,当z ≤ 0.2情况下,采用电机再生制动,当z > 0.7情况下采用机械制动,其余情况需要进行电机再生制动和机械摩擦制动相结合的复合制动。
基于前述的制动力分配可得到最大的前轮总制动力,为了尽可能的回收制动能量,需要在前轮上合理分配电机再生制动力和机械摩擦制动力。文献[3]给出电机最大再生制动力计算模型,其原理是通过比较前轮需求制动力和电机能提供的最大制动力来进行前轮制动力分配。该种计算方法仅仅考虑了电机发电效率、电池充电效率等部分因素,而影响提供再生制动力大小的因素很多,很难用一个解析模型来描述这种复杂的非线性关系,本文引入模糊逻辑控制器,基于人的经验和知识进行智能分配,实现前轮电机再生制动力和机械摩擦制动力的合理分配。

图4 制动力分配模糊控制策略结构Fig. 4 Fuzzy braking force distribution system framework
3 模糊控制的制动力分配策略
本文设计的基于模糊控制的制动力分配控制系统结构如图4所示,主要由三个模块组成,第一个是制动力分配模块,根据本文提出的制动力分配策略对需求的总制动力进行前、后轮制动力分配。第二个是模糊控制器模块,为三输入单输出的结构,三个输入分别为制动强度、蓄电池荷电状态(SOC,State of charge)和汽车行驶速度,输出为电机制动力占前轮总制动力的比例。第三个模块为制动力计算模块,根据所需的前轮总制动力、后轮总制动力和电机再生制动力占前轮总制动力的比例,计算出所需的电机再生制动力和分别加载在前、后轮的机械摩擦制动力。
模糊控制器首先对三个输入量进行模糊化,即确定每个输入量的隶属度函数,这是模糊控制器设计的基础。常用的方法有:模糊统计法、例证法、专家经验法等,本文是通过专家经验法来分别给出对应变量的隶属度函数[8]。
制动强度的隶属度函数采用钟型隶属度函数,如图5-a所示,模糊子集high表示制动力需求较大,一般车辆出现在紧急刹车情况;模糊子集middle表示对制动力需求一般;模糊子集low表示对制动力需求很小,一般为车辆处于下坡滑行状态。
蓄电池SOC的隶属函数采用钟型隶属度函数,如图5-b所示,模糊子集high表示电池剩余电量较多,此时不需要或只需要少量充电;模糊子集middle表示电池剩余电量一般,此时车辆制动可以合理分配电机制动和机械制动;模糊子集low表示电池剩余电量较少,此时可以全部采用电机制动。
车速的隶属度函数采用钟型和高斯型隶属度函数,如图5-c所示,模糊子集high表示车速比较高,如车辆在高速公路行驶;模糊子集middle表示车速一般,如城市道路工况;模糊子集low表示车速较低,如车刚启动不久或即将停车。
输出的电机制动比k的隶属度函数如图5-d所示,为提高隶属度函数的分辨率和控制的灵敏度,模糊子集low,middle,high采用三角函数,模糊子集lower,higher采用梯形函数。模糊子集lower表示输出极小的电机制动比例,如在蓄电池SOC值很高时,为了蓄电池安全,此时不采用电机制动力;模糊子集low表示输出较低的电机制动比例,主要靠机械摩擦制动;模糊子集middle、high表示输出中等或较高电机制动比例,前轮电机制动力和前轮摩擦制动力按比例输出;模糊子集higher表示输出极大的电机制动比例,此时前轮制动基本由电机制动力来承担。
模糊规则的制定合理关系到模糊控制器能否达到预期控制效果。本文采用如下规律制定模糊规则[9,10]:
1)蓄电池荷电状态SOC大于0.8,不进行制动能量回收,避免对蓄电池过量充电而损坏。
2)在制动强度比较低时,采用纯电机制动;当制动强度逐渐增大,采用电机制动力和机械制动相结合的方式;汽车处于紧急制动状态,全部采用机械摩擦制动来实现车辆制动。
3)在车速很低时,如堵车时,由于电机产生制动转矩很小,此时制动以机械摩擦制动为主,而随着车速的增加,电机再生制动力所占比例逐渐增大。
以上规律既保证了车辆制动的稳定性和安全性,还考虑了回收更多的制动能量。根据经验和大量的实验,制定了27条模糊规则,如表1所示。
模糊控制器的输出是个模糊值,但在实际中需要的是精确值,所以应采用合理的方法进行去模糊化。本文考虑到驾驶的性能和舒适度,采用加权平均法计算出电机制动比,进而得出前轮上电机制动力和摩擦制动力的大小。

图5 输入量和输出量的隶属度函数Fig. 5 Membership function of input and output
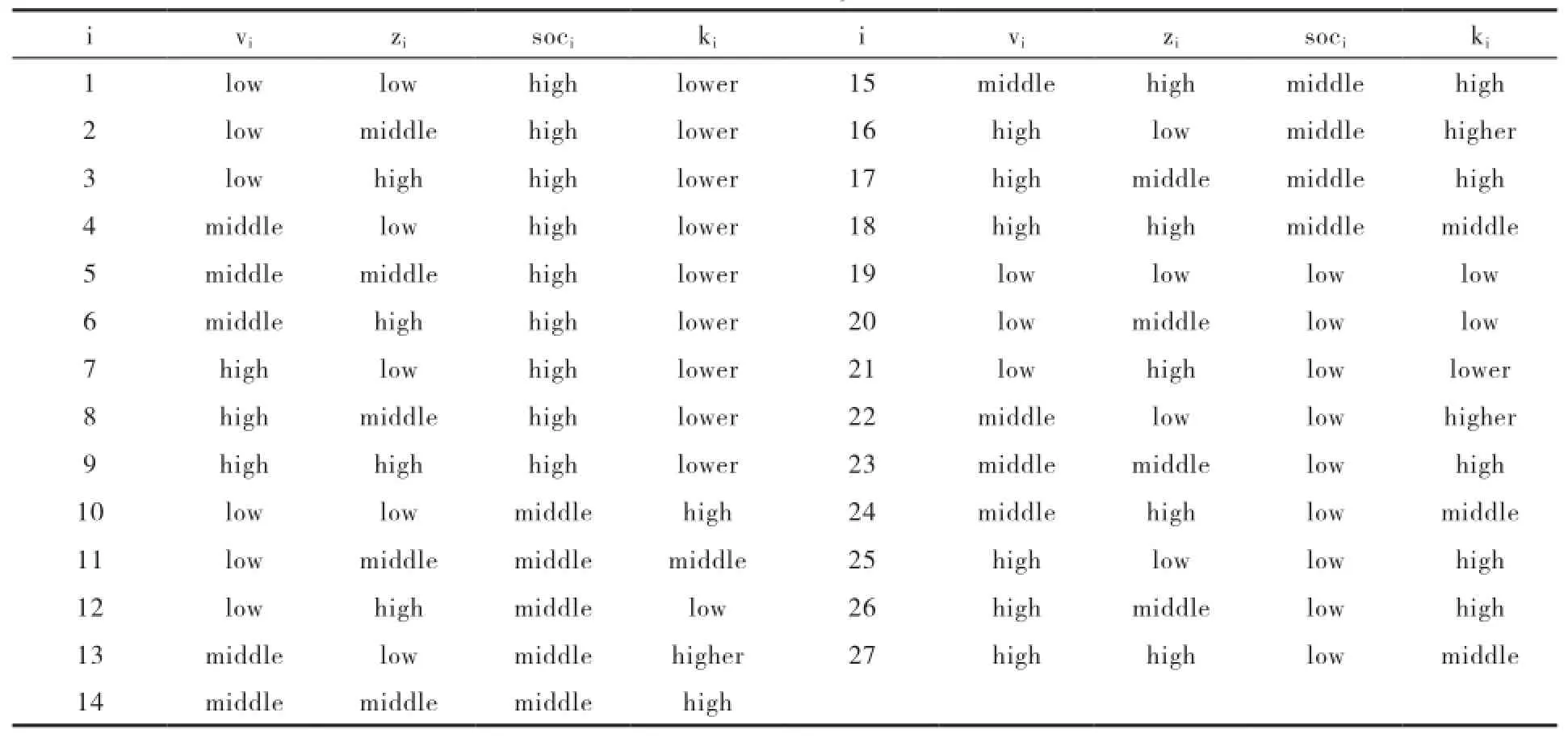
表1 模糊规则库Table 1 Fuzzy rules
4 仿真实验方法
为了验证所设计控制策略的有效性,在Matlab/Simulink环境下,根据前文所设计的分配策略建立后向仿真模型,如图6所示,并将模型嵌入到ADVISOR软件中,选择典型道路工况CYC-UDDS进行仿真实验,并与ADVISOR自带的控制策略进行对比实验,从蓄电池荷电状态SOC(ess_soc_hist)变化趋势和电机可输出转矩(mc_trq_out_a)变化曲线两方面对两种策略进行性能对比[8]。

图6 基于模糊控制的制动力分配仿真模型Fig. 6 the simulation model of braking force distribution Based on the fuzzy control
图7为在不同制动控制策略下蓄电池SOC变化趋势图,显然采用本文控制策略的蓄电池SOC值曲线会更加平稳,回收的电能更多。
图8为不同制动分配策略下的电机可输出转矩变化曲线的对比,可以看出电机输出的正转矩是重合的,因为本文仅仅对制动策略进行了设计,所以在汽车驱动状态下应具有相同的驱动力。当汽车处于制动状态时,本文所设计的制动策略使电机输出负转矩更大,即在制动时电机制动力矩所占总制动力比例增大,增加了制动能量的回收。
为了更加直观准确的表达制动能量回收效果,本文采用制动能量回收效率、有效制动能量回收效率和整车能量效率作为评价制动能量回收效率的三个指标。制动能量回收效率是指蓄电池回收的能量占整车制动总能量的百分比;有效制动能量回收效率是指蓄电池回收的能量占整车消耗的总能量的百分比;整车能量效率是指空气阻力消耗的能量和滚动阻力消耗的能量之和占整车消耗总能量的比值。在仿真结果界面中点击energy use figure按钮,显示出车辆不同部件在驱动状态和再生制动状态下的输入能量、输出能量、损失能量和整车能量效率参数,可以分别计算出三个指标值,如表2所示。
由上表可以看出,采用本文制动控制策略的三项指标都大于ADVISOR再生制动策略下的相应指标。同样多的制动能量,采用本文的制动策略,再生制动系统回收的能量更多,整车的能量效率得到提高,为提高电动汽车续驶里程奠定基础。

图7 蓄电池剩余电量SOC对比图Fig. 7 Comparison of battery's soc

图8 电机可输出转矩对比图Fig. 8 Comparison of motor torque outputs achieved
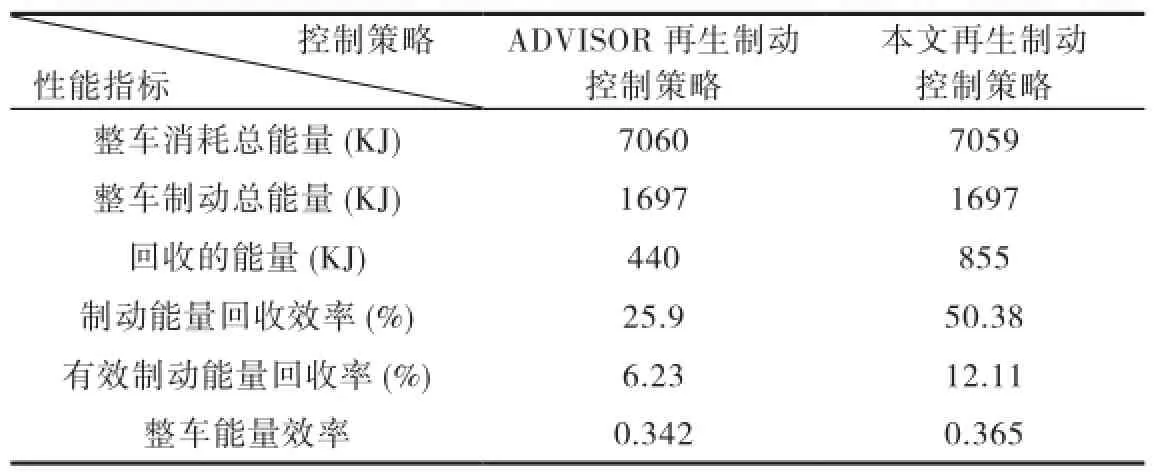
表2 再生制动能量回收效果对比Table 2 Comparison of Regenerative braking Energy recovery
5 结论
本文设计的基于模糊逻辑控制的制动力分配策略,利用此策略可以合理分配前轮电机制动力、前轮机械摩擦制动力和后轮机械摩擦制动力。通过在ADVISOR2002仿真软件上修改制动策略模块,并在城市道路工况CYC-UDDS工况下进行仿真对比实验,验证了所设计的控制策略能够充分利用道路附着系数,保证制动的稳定性,并可以回收更多的制动能量,提高了电动汽车的续驶里程。
[1] 董瑞青. 新能源汽车发展战略研究[J]. 新型工业化, 2011,(1): 18-24.
R Q Dong. Research on the development of New energy vehicle[J]. New Industrialization Straregy, 2011(1): 18-24.
[2] Wang L, Bai W. Development and Simulation of Electric Vehicle Based on ADVISOR[J]. Journal of Southeast university-English
Edition, 2006, 22(2): 196-199.
[3] SHI Qing-sheng. Key technologies research on energy management problems of pure electric vehicles[D]. Jinan: Shandong
University, School of Control Science and Engineering, 2009: 82-91.
[4] Yimin Gao, Liping Chen, Mehrdad Ehsani. Investigation of the Effectiveness of Regenerative Braking for EV and HEV[A]. SAE 2005-01-2910.
[5] Wang Yaonan, LIU Dongqi. A study of Mechanical and Electrical Compound Braking Force Distribution Strategy for Electric Vehicle[J]. Control Engineering of China, 21(3): 347-356, 2014.
[6] 赵国柱. 电动汽车再生制动稳定性研究[D]. 南京: 南京航空航天大学, 2006.
Zhao Guozhu. Study on braking stability of regenerative braking system for electric vehicles[D]. Nanjing: Nanjing University of Aeronautics and Astronaotics, 2006.
[7] Nanjing: College of Energy and Power Engineering, Nanjing University of Aeronautics and Astronautics, 2006.
[8] 张昌利, 等. 双能量源纯电动汽车再生制动模糊控制与仿真[J]. 系统仿真学报, 2011,23(2): 233-238.
C L Zhang, et al. Fuzzy control modeling and Simulation of Regenerative Braking System for Pure Electric Vehicle with Dualsource Energy Storage System[J]. Journal of System Simulation, 2011, 23(2): 233-238.
[9] 徐国凯, 等. 基于模糊逻辑的电动汽车制动力分配及能量回收控制策略研究[J]. 大连民族学院学报, 2010, 12(3): 212-217.
G K Xu, et al. Research on Braking Force Distribution and Energy Recovery Control Strategy for Electric Vehicles Based on Fuzzy Logic[J]. Journal of Dalian Nationalities University, 2010, 12(3): 212-217.
[10] 何仁, 等. 电动汽车混合制动系统控制策略的改进[J]. 江苏大学, 2013, 34(2): 125-131.
R Heng, et al. Improvement of control strategy in hybrid brake system of electric vehicle[J]. Journal of Jiangsu university, 2013, 34(2): 125-131.
[11] R Q Dong. Research on the development of New energy vehicle[J]. New Industrialization Straregy, 2011(1): 18-24.
Modeling and Simulation of Braking Force Distribution Strategy of Pure Electric Vehicle
JIANG Jianwei, YI Jiliang, HE Zhengyun, ZHOU Shuqing
(College of Electrical and Information Engineering, Hunan University of Technology, Zhuzhou 412007, China)
In order to ensure the safety of vehicle braking and improve the efficiency of energy recovery of electric vehicles at the same time, the author designs a new braking force distribution strategy based on fuzzy control based on the analysis of the common braking force distribution strategy. To overcome the shortcoming of the original control strategy, the braking strategy module of the ADVISOR 2002 is modified to dynamically adjust the braking force distribution ratio according to actual condition. Finally, combined with the typical road driving cycles, the proposed control strategy is simulated. The result shows it raises the recovery rate of braking energy and prolongs the mileage of the pure electric cars.
electric vehicle; braking force distribution; fuzzy logic control; ADVISOR software
10.3969/j.issn.2095-6649.2015.02.04
湖南省科技计划资助项目(2014GK3001)。
姜建伟(1983-), 男, 山西忻州人, 硕士研究生, 主要研究方向:智能检测和控制; 易吉良(1972-), 男, 湖南株洲人,湖南工业大学副教授, 主要研究方向: 电能质量分析, 数字信号处理研究。
姜建伟,易吉良,贺正芸,等.纯电动汽车制动力分配策略的建模与仿真[J].新型工业化,2015,5(2):19-26
