船舶发电机组的励磁系统模糊PID控制研究
2015-01-04欧阳松
欧阳松,汪 敏
(武汉船用电力推进装置研究所,武汉 430064)
0 引言
随着柴油机技术的更新与进步,柴油发电机组已成为现代船舶电站的主要电力来源。随着船舶吨位的不断增大以及船舶大功率负载的不断增多,对船舶电网的稳定性和电能质量的要求也逐渐提高。
为了使船舶柴油发电机组输出谐波更小、端电压更稳定的三相交流电,需要对转速和励磁进行闭环控制[1]。最常见的做法是采用经典PID控制器,但经典PID算法需要被控对象的精确模型,且性能不够理想[2]。因此,国内外学者提出了新的控制方式来取代经典PID控制方式,智能控制是一门快速发展的技术[3]。智能控制中的模糊控制不需要控制对象的数学模型,针对模糊控制算法,国内外学者做了很多研究,在具有非线性、强耦合的系统控制方面表现出了优良的性能[4]。文献[5]中将模糊控制算法应用于控制器的设计中,在设计过程中不需要被控对象的精确数学模型,避免了经典PID对于非线性系统的局限性。文献[6]中在控制系统中针,对系统中多变量的问题,设计了两个模糊控制器,进一步提高了控制器的性能。因此,本文结合模糊控制和经典 PID控制,设计同步发电机励磁系统的模糊PID控制器,该控制器由糊控制器和PID控制器并联而成,模糊推理机的输入为船舶发电机端电压的偏差及其变化率经模糊化处理后的模糊量。
1 模糊控制模型
在实际系统中,我们无法建立所有系统的精确模型。模糊控制不需要被控对象的精确模型,是对专家知识和人的手动控制策略进行总结和分析,然后来模拟人的思维、决策,将其经验转化为模糊控制的规则从而对系统进行相应的控制。模糊控制不需要获取精确模型、结构简单的优点,具有一定的智能性,适合于非线性、强耦合的控制系统[7]。
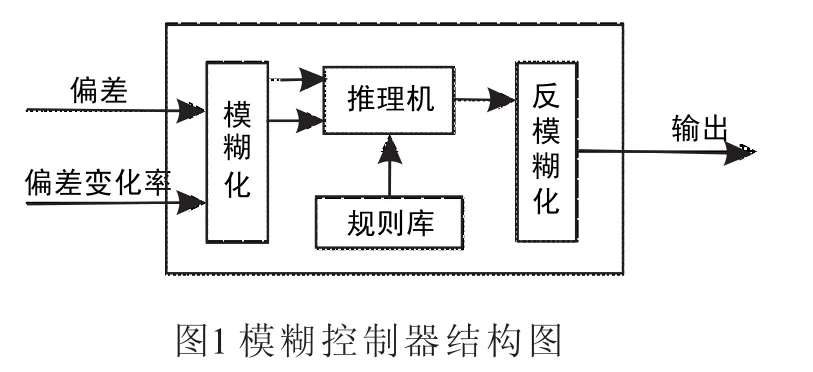
模糊控制器通常由模糊化、规则库、推理机和反模糊化构成。模糊化是控制量输入接口,将输入的精确值转换为推理机输入的模糊值;规则库存放被控对象的全部控制规则,在推理时为推理机提供控制规则;推理机有匹配和推理两个基本任务,通过输入量对应的模糊值来确定激活对应的规则,然后结合模糊规则计算得出控制器的输出量的模糊值;反模糊化是将推理机输出的模糊语言值转化为被控对象所需要的清晰数字量。模糊控制器的结构图如图1所示。
2 模糊PID控制器的设计
模糊PID控制器的设计可分为以下步骤:
1)确定输入和输出变量
同步发电机的励磁控制系统的作用是保证发电机端电压的稳定,因此,模糊控制器的输入变量为同步发电机的端电压的偏差值e及其变化率ec,将控制器的输出变量uf作为励磁机构的输入量。
2)模糊化处理
将发电机的励磁系统的模糊PID控制器的输入和输出量的语言变量分别取值为:
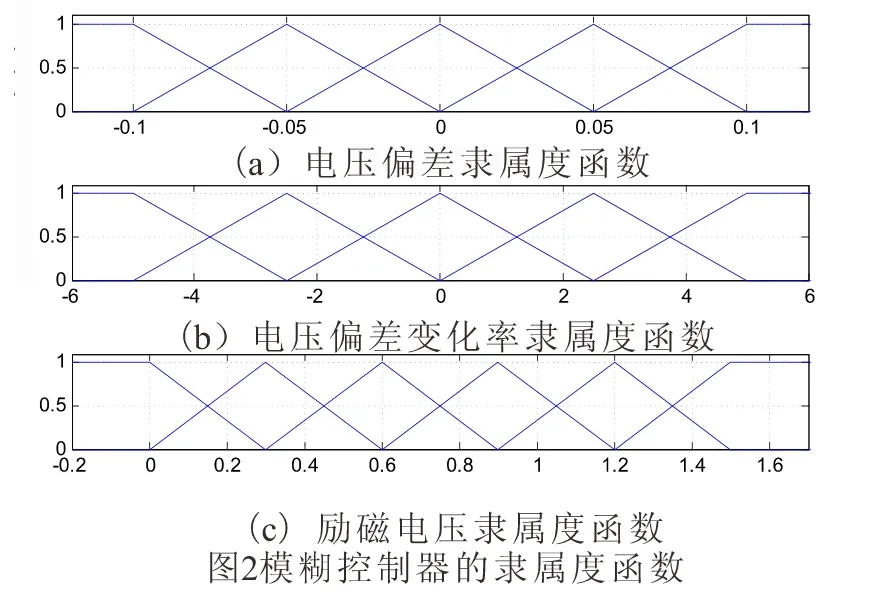
由于仿真中采用标幺模型,所得到的发电机稳定运行时的端电压为 1,通常要求端电压的变化在10%的范围内,因此,输入变量e的基本论域为[-0.1,0.1],ec的基本论域为[-5,5],输出变量uf的基本论域为[0,1.5]。
取输入变量e和ec的模糊论域为:
取输出变量uf的模糊论域为:

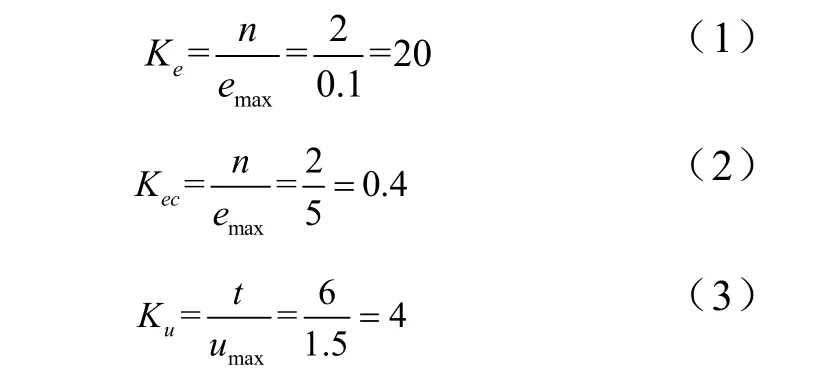
由此可知,量化因子分别为:
根据以上分析,采用三角隶属度函数规则,设计输入、输出隶属度函数如图2所示。
3)模糊规则的设计
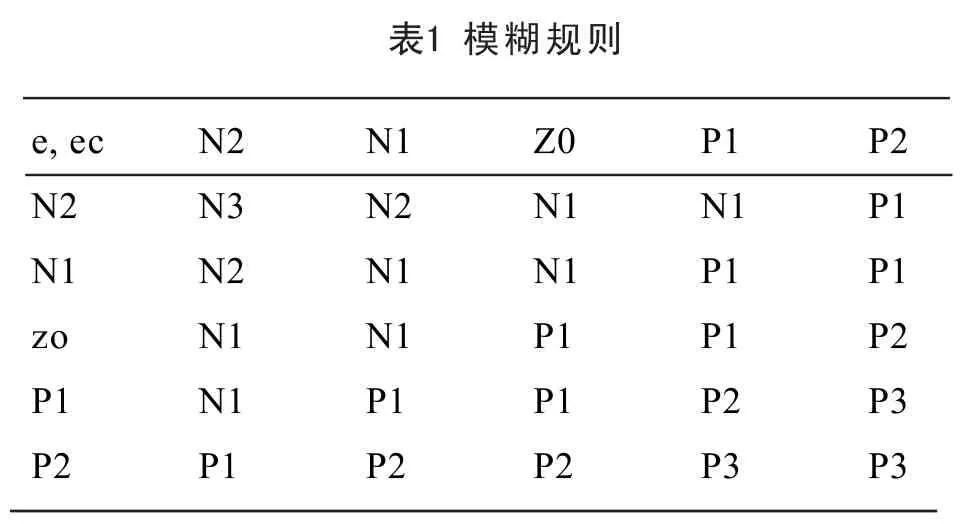
模糊规则的好坏决定着控制器的性能,将端电压的偏差和偏差的变化率经过模糊化后的模糊值作为推理机的输入,设计模糊规则表[8]。当偏差和偏差变化率为正且值很大时,应使其输出值为最大值;当偏差很小但是偏差的变化率很大时,且由于混合型模糊PID控制器的积分作用较小,因此需要将其输出值减小,以保证端电压的稳定;当偏差为正,但偏差的变化率为负时,可将模糊控制器的输出设为零,根据以上要求设计模糊规则,如表1所示。
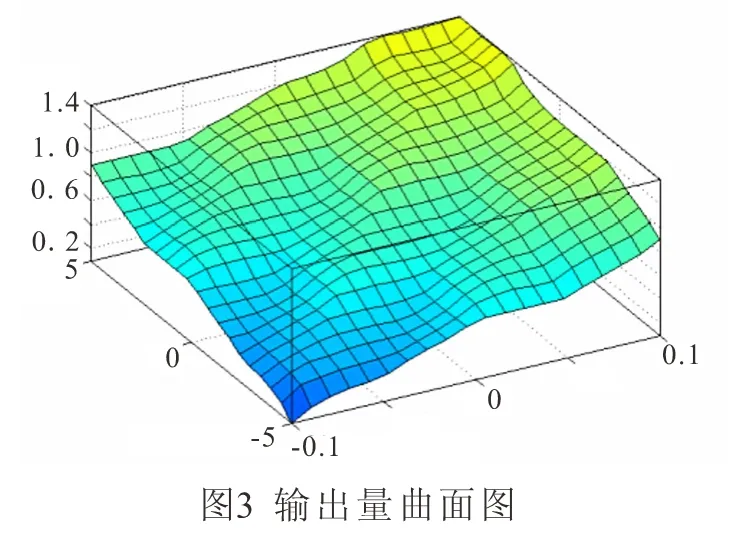
本文采用Mamdani模糊推理,在模糊推理运算中,与运算采用极小法,或运算采用极大法,结论合成采用累加法,输出解模糊采用面积重心法。基于Matlab的模糊逻辑工具箱建立相应的隶属函数和模糊规则,生成的输出量曲面如图3所示。
?
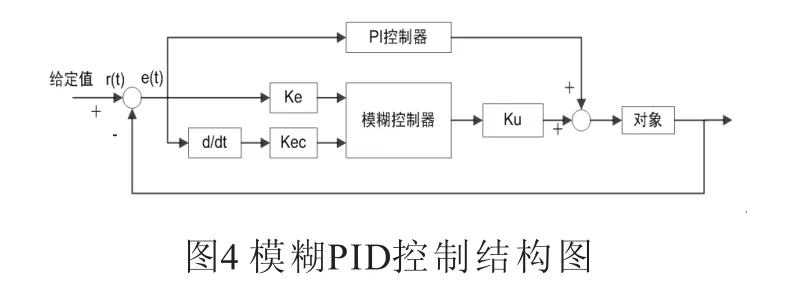
在复杂的非线性系统中,常采用模糊控制算法来进行控制,但模糊控制器的精度较差,稳定运行时其结果仍具有静差的缺点,因此常将模糊控制和经典PID控制算法结合起来使用构成模糊PID控制器,这样能结合两者的优点,在偏差较大时模糊控制器起主要作用,从而使得PID控制器的积分饱和减弱,在偏差较小的时候主要由经典PID控制器起作用,最终实现系统的无静差调节,获得较好的调节性能。模糊PID的结构如图4所示。
3 模糊PID控制器仿真模型
由于电机的仿真需要从稳定状态开始运行才能保证其结果不失真,因此在运行仿真前需要对电机进行初始化。因为电机的稳态值与参考值之间存在一定的偏差,仿真启动时需要克服这种差异则需要一定的时间,因此仿真会出现振荡。Matlab中为了克服这个问题提供了有效的方法,在仿真模型中加入 Power GUI,利用其“潮流计算”和“电机初始化”窗口进行设置。在柴油发电机组仿真模型中含有类刚性系统,所以一般采用ode15s算法。在同步发电机开路时,没有端电流则仿真不能通过,因此需要在电机上加一个很小的负载,其值接近于零,保证其由负载电流很小且近似于空载。
在Matlab环境下建立模糊PID控制器的仿真模型,如图5所示。
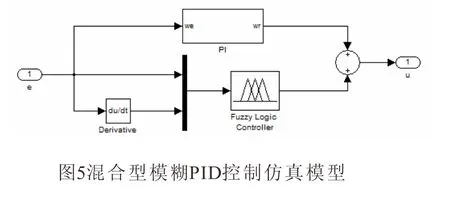
在 Matlab环境下调用模糊控制工具箱中的模糊控制模块设计模糊PID控制器。首先调出模糊控制器并对输入和输出隶属度函数进行设计,设计模糊规则,至此已经完成了船舶柴油发电机组的模糊PID控制器。
船舶柴油发电机的仿真模型如图5所示,主要由柴油机、调速系统、转速检测、励磁系统、同步电机组成。
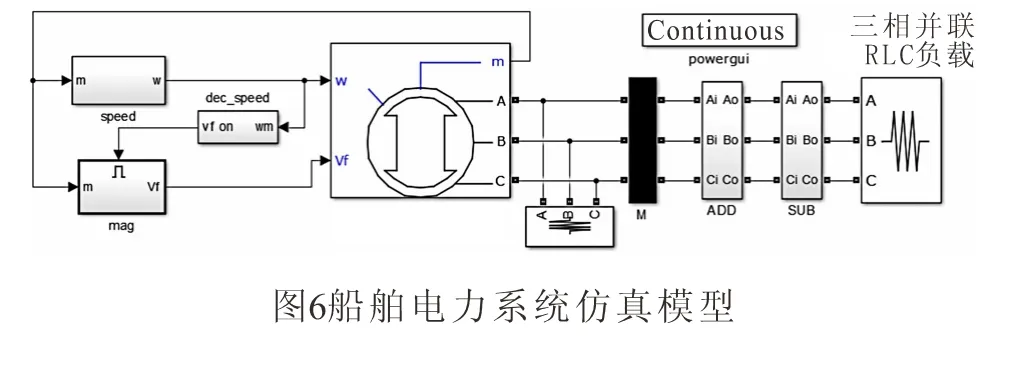
图6中speed为柴油机及调速模块;dec_speed为测速模块,其功能是检测柴油机的速度是否达到额定值,以此来判断是否给同步发电机施加励磁电压;mag为采用模糊PID控制器的励磁系统;ADD为自动加载模块;SUB为自动卸载模块。
4 模糊PID控制的系统仿真分析
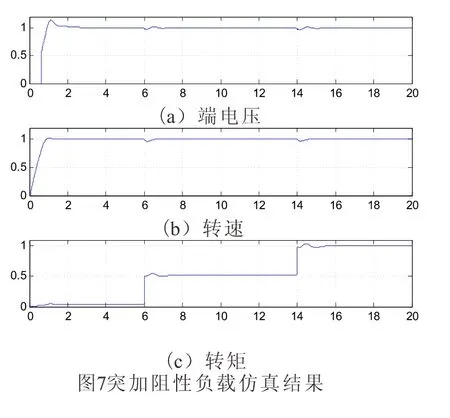
针对船舶电力系统的多种典型负载,进行了系统的突加、突减负载以及带载起动仿真。在发电机稳定运行后,在6 s时自动闭合断路器,给发电机突加 50%的负载。稳定运行后,在 14 s时再突加50%的负载纯阻性负载,最终发电机带额定负载稳定运行。仿真结果如图7所示。
由图7仿真结果分析可知,柴油机在起动、加载时,其转速超调都非常小,其值小于 2%,且其调节时间为0.8 s,满足《钢质海船入级规范》(以下简称《规范》)要求;在同步发电机起动时满足《规范》的要求;在整个加载的过程中,发电机组的端电压的超调量和调节时间都满足要求;励磁装置具有转速检测功能,当转速接近同步转速(在0.5 s)时刻,给发电机施加励磁电压,建立发电所需要的磁场。在突加负载后,发电机的电磁转矩在两次加载时其超调量都比较大,其调节时间也较短。从其输出端电压的性能来说,在加载时其超调量和调节时间都能满足要求,在起动时的超调量为12%且调节时间为1.4 s,也满足《规范》中的性能指标要求。励磁控制系统中采用模糊PID控制比文献[1]中采用经典PID控制的发电机组的端电压的性能较好,也满足《规范》中的性能指标要求。
5 结束语
本文结合模糊控制和经典PID控制的优点,设计了发电机励磁系统的模糊PID控制器。将发电机端电压的偏差及变化率作为模糊控制器的输入,并将模糊控制器和PID控制器进行并联构成同步发电机励磁系统的模糊PID控制器。使发电其端电压的超调量为12%,但其调节时间为1.4 s,机的端电压更加稳定,具有较好的静态、动态性能。通过仿真分析验证了该控制方法有效可行,能够解决复杂控制系统中的非线性问题,使船舶发电机组的性能指标满足《规范》的要求。
[1]见可可.船舶电力系统的建模与模糊控制研究[D].武汉: 武汉理工大学,2012.
[2]刘成.船舶柴油机主机实时仿真系统的建模与转速控制[D].上海: 上海海事大学,2004.
[3]孙增圻等.智能控制理论与技术[M].北京: 清华大学出版社,2011.
[4]Chedid R.B.,Karaki S.H.,El-Chamali C.Adaptive fuzzy control for wind-diesel weak power systems[J].IEEE Transactions On Energy Conversion,2010,25(1):71-78.
[5]刘雨.船舶柴油发电机组的建模与智能控制的仿真研究[D].大连: 大连海事大学,2002.
[6]Samir Nejim.Rudder roll damping system for ships using fuzzy logic control [J].The 2009 IEEE International Conference on Fuzzy Systems,2009,24(1):1137-1141.
[7]Zhang Yufeng,Li Shengjin,Lu Gang,et al.A fuzzy self-tuning PID control system of adjustable speed diesel generator[C].2012 International Conference on Systems and Informatics(ICSAI2012),2012:619-622.
[8]Wei He,Min Ren,Yingqi Tan.A fuzzy control system of diesel generator speed[C].Asia-Pacific Power and Energy Engineering Conference,2009: 1-4.
