随机共振于滚动轴承支撑的转子早期碰摩故障中的应用
2015-01-04郑发彬
吕 运,曾 懿,郑发彬,侯 彪
(1.海军蚌埠士官学校机电系,安徽蚌埠 233012;2.91592部队装备处,广州 510335)
0 引言
滚动轴承支撑的转子具有速度高、配合精密等特点(如燃气轮机等),碰摩故障是滚动轴承支撑的转子的典型故障之一,其破坏性大,一旦出现后果严重。然而,由于在转子周围各种噪音很大,很难直接判断是否发生碰摩故障,因此对转子的碰摩故障诊断,特别是碰摩早期的故障诊断意义重大。目前,转子碰摩故障诊断得到研究人员的广泛关注。国内外人员对此做了大量研究[1-3],取得了一些成果,但多数方法检测的是强碰摩时的倍频信号,对于微弱碰摩信号的检测效果差强人意。特别是对于滚动轴承支撑转子来说,滚动轴承本身产生的倍频信号对碰摩信号干扰很大,容易产生混淆。
随机共振(SR)的概念是意大利学者R.Benzi等人在1981年提出的[4]。随着对SR理论研究的深入,它逐渐被应用到微弱信号检测领域[5-9],并在周期微弱信号检测方面显示了独特的优越性。研究表明,由于转子转动频率的存在,早期碰摩时碰摩信号虽然很微弱,却表现出了一定的周期性,且一般为分频信号[10-12]。这就为随机共振的应用带来了契机。
本文通过仿真研究确认随机共振在强干扰下可以提取分频信号和倍频信号。并对实验测得的转子碰摩早期时基座的振动信号进行随机共振处理,提取了碰摩早期产生的分频信号,表明随机共振在转子早期碰摩信号的提取方面效果明显。
1 随机共振原理简述
简单来说,随机共振是通过双稳系统将噪声信号能量向低频有用信号集中,从而有用信号能量得到加强,使信噪比得到提高,有用信号被凸显出来。
考虑最常见的双稳系统:被一个单频信号(可假设为正弦或余弦信号,本文采用正弦信号)和白噪声的混合信号s(t)=As in(2πft)+w(t)作用的双稳系统:

其中,系统参数a>0,b>0,A为正弦信号幅值,f为信号频率,w(t)为统计平均值为 0的高斯分布白噪声,且满足E[w(t)w(t+τ)]=2Dδ(t-τ),其中D为白噪声强度,τ为时间延迟,噪声方差为。
当A=0,w(t)=0时,通过计算可知,系统存在x=0一个势垒点和两个势阱点,势垒高为。视系统的初始状态,质点处于两个势阱中的一个。
若A≠0,且A小于Ac值时,随着A的变化周期信号会驱使势阱倾斜,质点在其中一个势阱作周期运动,但由于势垒高Ac的存在,质点不能在势阱间跃迁。
随着A变大到大于或等于Ac值时,倾斜的势阱的最低势阱点都高于势垒,相当于该势阱消失,系统的势阱只剩一个,系统将在周期信号的驱使下在势阱内作周期运动。
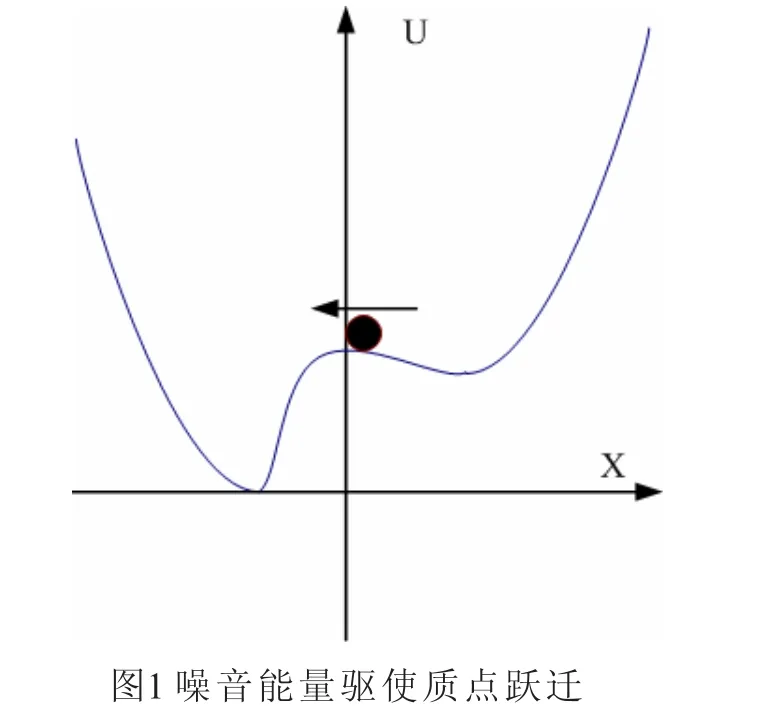
当存在双势阱时(此时A比较小),若噪声不为0时,如图1所示,质点可以在一定的噪声的驱动下在势阱间往复跃迁,由于双稳态之间的电势差远大于输入信号的幅值(较小的A),从而起到对输入的周期信号放大的作用,同时噪声也因系统输出的有规则变化而被抑制,系统的微弱信号得到凸显。
2 随机共振与模拟滚动轴承倍频信号中提取分频信号的仿真实现
假设随机共振输入信号为三个周期信号和白噪声的叠加,周期信号幅值A=1,频率f1=100 Hz,f2=200 Hz,f3=400 Hz,白噪声强度D=5,采样频率fs=50000 Hz。分别取系统参数a=1,b=1,采用四阶龙格-库塔算法对双稳系统方程求解,取步长去h=10000/fs。图2显示的分别是输入和输出的时域、频域波形图,其中(a)、(c)分别是输入的时域、频域波形图,图形显示无任何规律可言。(b)、(d)分别是经随机共振后输出的时域、频域波形图,可以看出经随机共振系统后时域图上存在明显的周期信号,频域图在100 Hz、200 Hz、300 Hz、400 Hz、500 Hz等处有明显的谱线。如果把f1=100Hz看作基频信号,f2、f3则是倍频信号,但没有100Hz以下的分频信号出现。如果把f2=200 Hz看作基频信号,f1是分频信号,f3则是倍频信号,从(d)图中可以看到倍频信号和分频信号均被提取出来了,且倍频信号对分频信号没有干扰,说明随机共振可以用于微碰摩分频信号的提取,且不受滚动轴承倍频信号干扰。
3 实验设计
图3左图所示的是本实验室已有的滚动轴承支撑的旋转机械故障模拟平台。
设计实验碰摩支架如图3右图所示,支架为钢质支架,可以通过四个紧固螺钉固定在转子处,支架上打了三个直径为10 mm的螺孔,设计三个直径为10 mm、长度为10 cm的螺栓作为单点或多点碰摩的对象,为防止碰摩时螺栓与转子碰撞会损害转子,在本实验螺栓采用材质较软的铜螺栓。拧进一个或几个铜螺栓可模拟转子的模拟单点、多点碰摩,调节铜螺栓拧进支架的进量相当于调整转静件之间的间隙,可以模拟不同间隙下的转子碰摩。
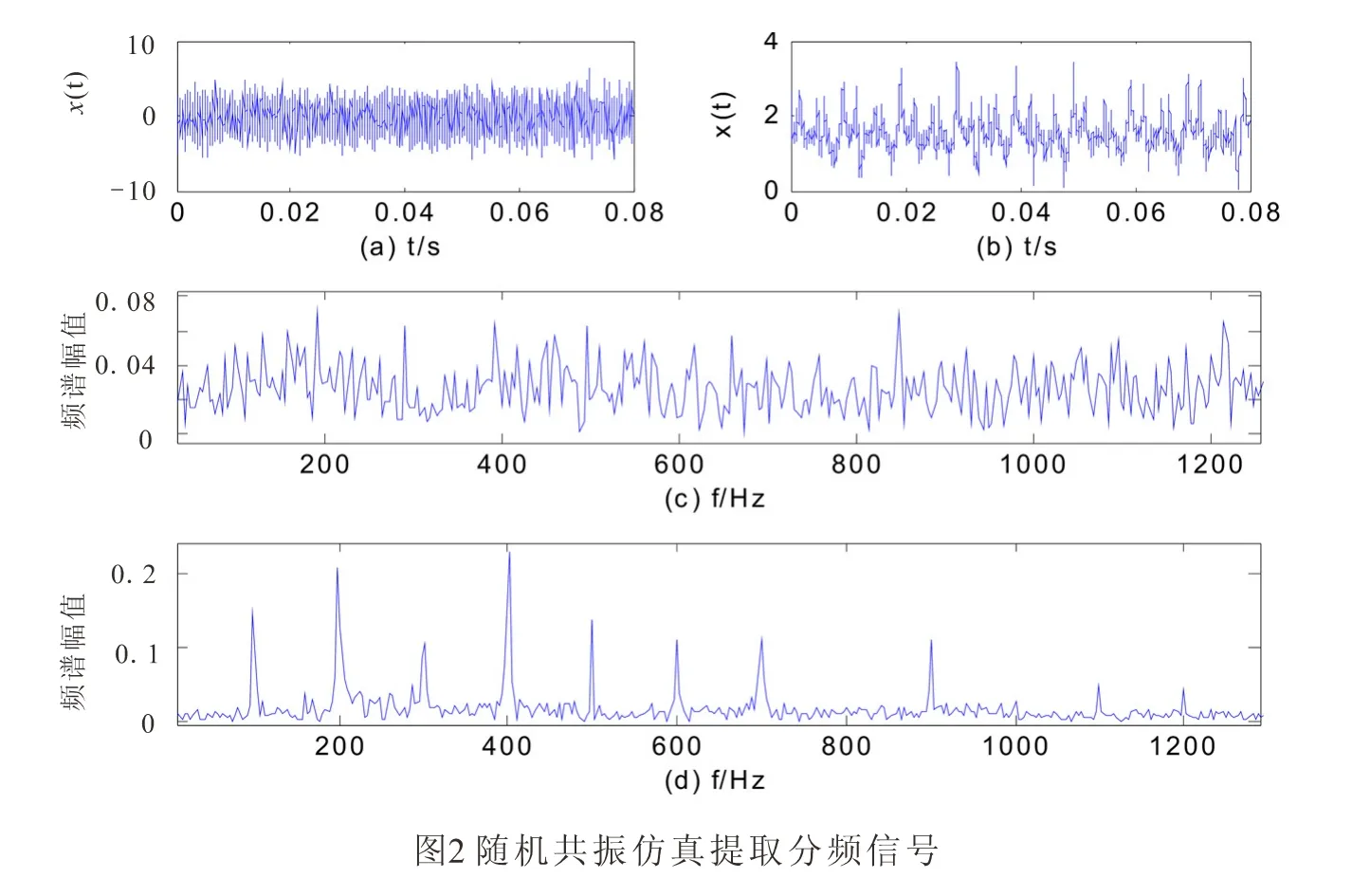
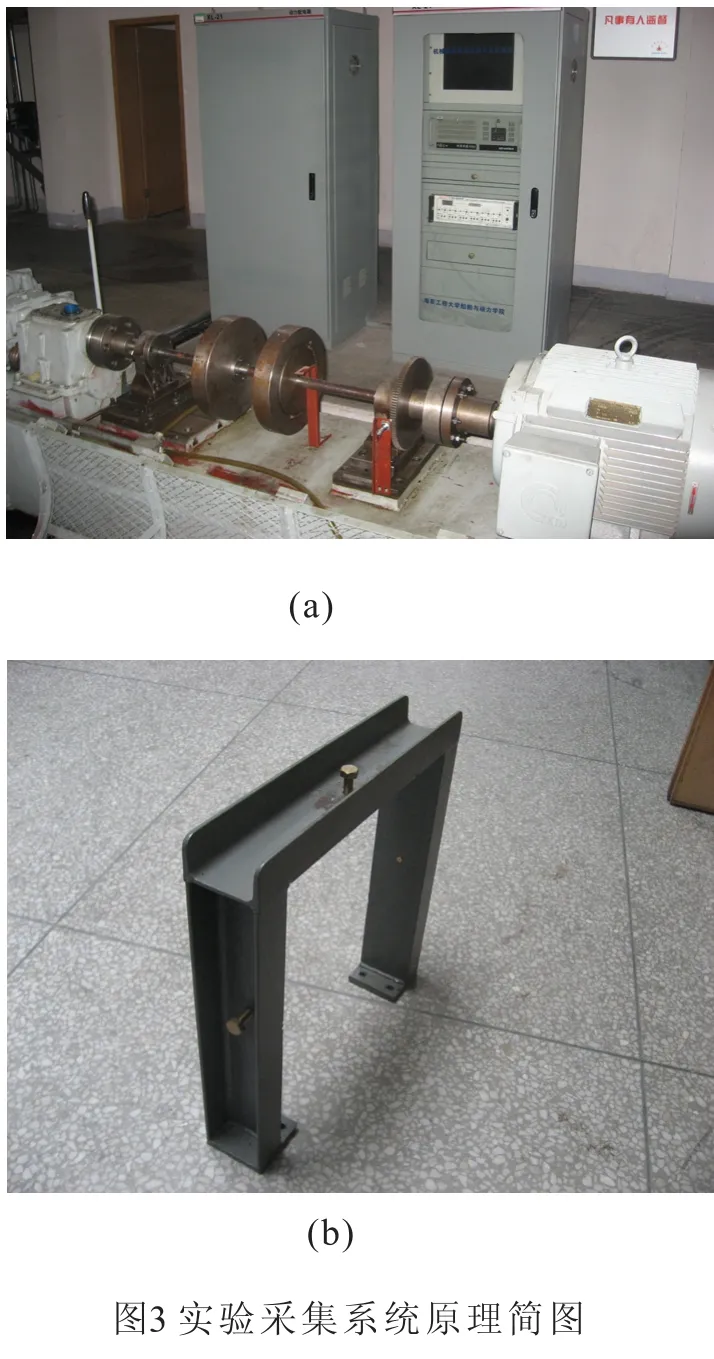
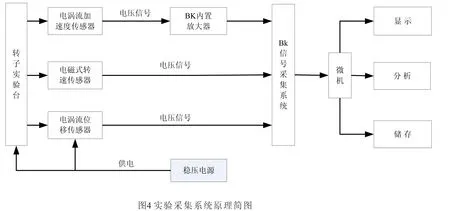
图4是实验采集系统原理简图,用六通道的BK信号采集系统采集六个需要的信号,所用传感器是电涡流传感器和电磁式转速传感器。其中3个用于测量基座振动的加速度传感器(分别用于碰摩支架处基座、两边支撑的滚动轴承处基座信号采集,进行对比)、2个用于测量转子轴心轨迹的位移传感器和1个用于测量转速的电磁式转速传感器。本文分析的是轴承处基座的加速度信号。
4 随机共振用于碰摩早期信号的提取
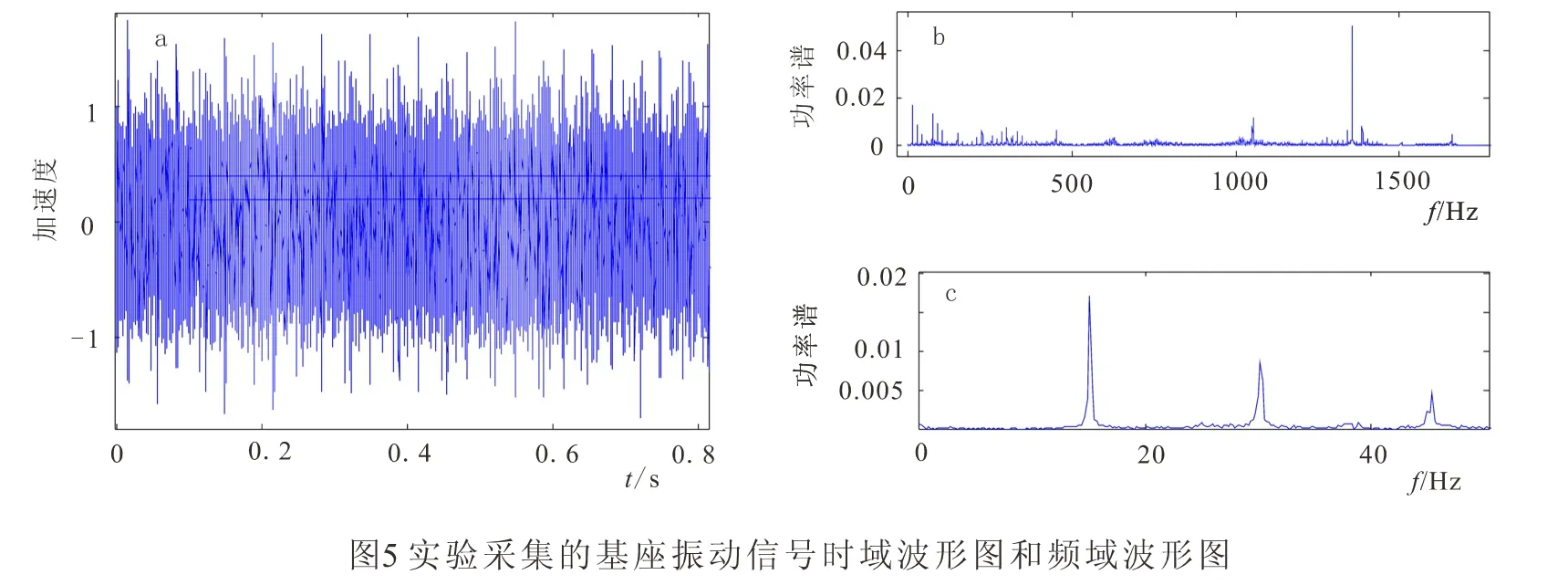
调整到转速ω=900 r/min,采样频率fs=64 k,在滚动轴承支撑的旋转机械故障诊断实验平台模拟碰摩早期故障,图5显示的是用加速度传感器采得的基座的振动信号,其中(a)图为时域波形图,(b)图为频域波形图,(c)图为(b)图在低频段的局部放大。从中可以看出除因基座共振产生的很高的高频信号外,在f=15Hz有基频信号,且还有30 Hz、45 Hz等很多倍频信号,但看不到分频信号。由于滚动轴承振动本身会产生倍频信号,因而无法判断是否发生了碰摩。
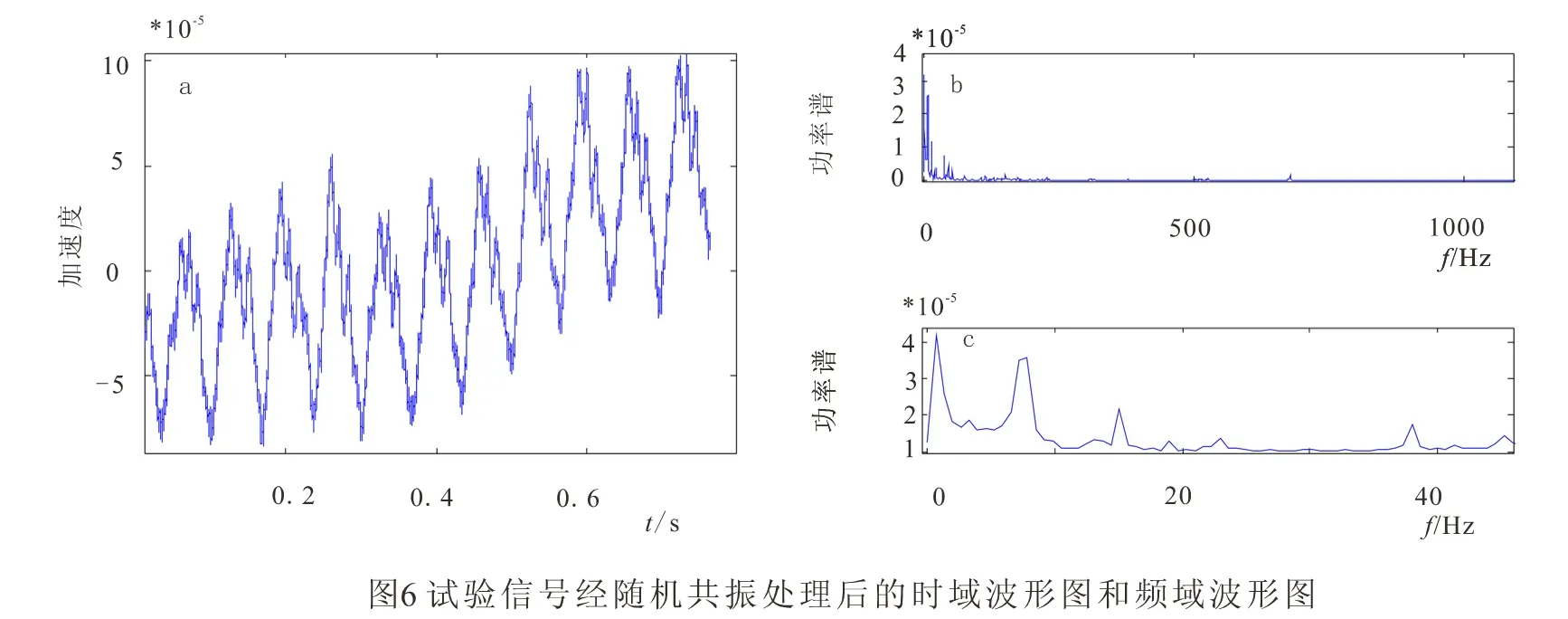
对采集的信号进行随机共振处理,图6显示的是处理后的信号。从频谱图中可以看出除f=15 Hz的基频和一些倍频外,图中在f=7.5 Hz和f=1.5 Hz有明显的波形,f=3 Hz也有较弱的波形,这些都是分频信号,从而可以断定转子必发生了碰摩,这也与实验吻合。
5 结论
随机共振可以将信号中的无用干扰信号能量向低频有用信号部分集中,从而将微弱信号从复杂的背景信号中凸显出来。本文利用随机共振这一特性,从滚动轴承支撑的转子发生微弱碰摩时同时产生基频、倍频和分频信号中,成功地将早期碰摩的低频微弱分频信号提取出来,确定转子发生了碰摩故障。说明随机共振可以用于转子早期碰摩微弱信号的检测,检测结果可以作为转子发生碰摩故障的重要依据之一。
[1]陈仲生,温熙森,杨拥民等.基于谱线再生技术的电机转子早期碰摩故障检测[J].中国电机工程学报,2004,8(24): 124-128.
[2]王仲生,何红,陈钱.小波分析在发动机早期故障识别中的应用研究[J].西北工业大学学报,2006,2(24): 68-71.
[3]程军圣,于德介,杨宇.EMD方法在转子局部碰摩故障诊断中的应用[J].振动、测试与诊断,2006,3(26): 24-27.
[4]Sutera B,Uplania A.The mechnism of stochastic resonance[J].Journal of Physics A: Mat hematical and General,1981,14(11): 453-457.
[5]冷永刚.二次采样随机共振的工程应用研究[J].中国机械工程,2004,10(15): 1847-1852.
[6]Fabing Duan.Binary modulated signal detection in a bistable receiver with stochastic resonance[J].Science Direct Physics A376,2007: 173-190.
[7]林敏,黄咏梅.基于调制随机共振的转子故障早期检测[J].中国电机工程学报,2006,4(28): 128-131.
[8]王太勇.基于变尺度随机共振的油管漏磁信号检测[J].计量学报,2008,1(29): 69-72.
[9]杨宁.自适应随机共振在微弱信号检测中的应用[J].机械强度,2012,34(6): 798-802.
[10]岳国金.转子系统故障振动特征分析.北京航空航天大学博士论文,1989.
[11]Beatty,R.F.Differentiating rotor response due to radial rubbung.ASME Journal of Vibration,Acoustics,Stress and Reliablity in Design,1985,107(4):151-160.
[12]Muszyska,A.Partial lateral rotor to stator rub.3th International Conference on Vibration in Rotating Machinery,1984:327-335.
