高铁隧道平面控制网横向贯通误差仿真研究
2015-01-04周凌焱刘成龙聂松广张强孙维亚
周凌焱,刘成龙,聂松广,张强,孙维亚
(西南交通大学地球科学与环境工程学院,四川成都611756)
随着测量新技术、新方法[1]广泛应用于洞外控制测量,使得由洞外控制测量引起的贯通误差大大减小,因此,对隧道贯通起决定性作用的是洞内控制测量[2]。隧道贯通误差可分解成纵向贯通误差、横向贯通误差和竖向贯通误差,其中横向贯通误差为沿垂直于隧道施工中线的水平方向贯通偏差[3],是制约隧道贯通的关键[4]。因此,如何有效控制隧道的横向贯通误差,研究洞内平面控制网的横向摆动规律,无论从经济上还是从技术上显得尤为重要。由于受隧道形状和空间的限制,目前高铁隧道洞内平面控制网,一般布设成导线网的形式。实践证明,现有的构网方法在一定程度上可以提高导线点的精度,但对于长大隧道(即隧道长度≥7 km),单纯的增加导线点个数、改变导线形状,并不能有效提高导线横向点位精度,加之隧道洞内导线测量时不可避免受到旁折光影响,使测角精度有所降低,导致洞内导线方位角闭合差常常超限,给高铁隧道洞内平面控制测量带来一定困扰。刘成龙等[5]提出一种将自由测站边角交会网应用于隧道洞内平面控制的新方法,该方法具有受施工干扰小、点位可靠稳定、无对中误差、受旁折光影响小等优势,可代替传统的导线网。本文对4种隧道洞内平面控制测量的方法,即附合单导线、导线环网、交叉导线网和自由测站边角交会网,进行精度估算和仿真计算,通过统计精度估算后得到的点位中误差和仿真计算后得到的横向贯通误差等指标,分析不同类型洞内平面控制网的精度和横向贯通中误差的大小,进而从中选取较好的控制测量方法进行隧道洞内的平面控制测量;通过统计仿真计算后得到的横向贯通误差,研究洞内平面控制网横向摆动的规律。
1 仿真控制网的构建方法
目前,高铁隧道洞内平面控制网主要有附合单导线、导线环网、交叉导线网和自由测站边角交会网等4种方法,其中前3种为导线网,第4种是目前比较新颖的方法[5]。如图1~图4所示,CPI1,CPI2和CPI3,CPI4分别是隧道进出洞口处的洞外控制点,也是隧道洞内控制网的起算数据;CP001,…,CP012是洞内控制点;图4中ST001,…,ST009是自由测站点。
导线网洞内控制点一般间距300~400 m左右,其中附合单导线的导线点单点交错布设在洞内地面上,导线环网、交叉导线网的导线点成对布设在洞内地面上,导线网的观测值是网中各边的边长与水平方向。自由测站边角交会网的控制点成对布设在洞内围岩的双侧壁上,并采用强制对中标志安装测距棱镜,在控制点上无法架设全站仪;洞内自由测站边角交会网控制点点对间距一般为250~300 m左右;全站仪自由测站架设在相邻2对控制点中部,观测值是自由测站至各控制点间的边长与水平方向,边长只能单向观测;洞内自由测站边角交会网多余观测值也较多,特别是全站仪和棱镜没有对中误差,使控制点的横向精度得到了较好的控制,是一种长大隧道洞内平面控制测量的新方法。

图1 附合单导线示意图Fig.1 Schematic diagram of connecting traverse

图2 导线环网示意图Fig.2 Schematic diagram of ring traverse network

图3 交叉导线网示意图Fig.3 Schematic diagram of cross traverse network

图4 自由测站边角交会网示意图Fig.4 Schematic diagram of free-station linear-angular intersection network
1.1 平面控制网的设计
根据文献[6]的设计要求,时速300~350 km/h的单洞双线隧道,隧道断面宽度不少于12.6 m,考虑到控制点距离隧道壁有一定距离,因此仿真控制网设计时,将高铁隧道洞内CPⅡ控制网的控制点点对横向间隔设计为12 m,纵向间隔设计为300 m。根据4种隧道平面控制网的构网方式与设计参数,在AutoCAD 2013中绘制上述4种隧道洞内平面控制网。洞内控制点点号以CP开头,从001开始随着隧道里程增大依次步进;自由测站点点号以ST开头,从001开始随着隧道里程增大依次步进。利用CAD的“标注”功能,量测任意2控制点之间的平距值和任意一个夹角的水平角度值。
设隧道中线与测量坐标系X轴重合,与CAD坐标系X轴平行。测量坐标系X轴正方向与隧道里程增大方向相同,垂直于X轴向下为Y轴正方向,坐标系原点O距离隧道入口2 000 m,构建隧道平面左手直角测量坐标系O-XY;设CAD的平面右手坐标系为Oc-XcYc,则隧道平面测量坐标系及其与CAD坐标系关系如图5所示。由于测量坐标系X轴与隧道中线重合,因此测量坐标系中Y坐标的摆动即为洞内控制网的横向摆动,Y方向的误差即为隧道的横向误差。

图5 仿真实验隧道独立坐标系与CAD坐标系关系示意图Fig.5 Schematic diagram of the relationship between independent coordinate system of simulative tunnel and CAD coordinate
1.2 验前精度的设定
根据文献[7]可知,长大隧道(长度>7 km)洞内平面控制网精度等级应为隧道二等,因此测距相对中误差为1/250 000,即4 mm/km,考虑到全站仪均具有固定误差,因此将测距误差设定为2 mm+2 mm/km;一般高铁长大隧道洞内控制测量多采用0.5″的全站仪,因此将水平方向测量精度设定为0.5″。
2 精度估算与仿真计算方法概述
为了研究隧道洞内不同类型控制网的横向贯通精度,对上述仿真控制网进行精度估算;为了探讨控制网的横向摆动规律,对上述仿真控制网进行附加误差的仿真平差计算。
2.1 精度估算方法
假设网中距离观测值为S,距离改正数为vS,洞内控制点近似坐标为X0和Y0及改正量为δx和δy,可对距离平差值方程式按泰勒公式展开,舍弃掉二次及多次项,取一次项得距离误差方程式为[8-12]:
再假设网中水平方向观测值为L,其改正数vL,洞内控制点近似坐标为X0和Y0及改正量为δx和δy,则对水平方向平差值方程式按泰勒公式展开,舍弃掉二次及多次项,取一次项得水平方向误差方程式为[8-12]:
根据经验定权可确定平面控制网内2类观测值的权比关系,即[11]:

式中:PSi为距离的权值;PLi为水平方向的权值;为单位权方差且σ0=σL,σL为水平方向测量中误差;σSi为距离的测量中误差;a和b分别为全站仪距离测量的固定误差和比例误差;Si为测站到目标点的距离。
根据设计的洞内控制网与在CAD中量测控制网的观测值,则可按照式(1)和式(2)构建B矩阵,根据全站仪的标称精度和式(3)可构建P矩阵,则待估参数协因数阵[8~12]为:

这样,洞内各控制点X和Y方向坐标中误差及其点位误差分别为[8-12]:
根据上述方法和公式可估算洞内任意控制点的点位精度等所设计控制网的各项精度指标。
2.2 仿真平差计算方法
上述精度估算的方法只能获取洞内各个控制点的点位中误差等精度指标,并不能像实际测量后的控制网一样,通过对控制网的严密平差获取各个控制点的坐标。因此,为了研究隧道洞内控制网的横向摆动情况,本文对构建的仿真控制网观测值平差文件添加一定的扰动误差,来模拟隧道洞内控制网实际测量时的随机误差。
外业测量的数据应先进行气压、温度改正和两化改正,从而消减外业数据中包含的系统误差,因此仿真平差前的观测值中添加的误差应主要为偶然误差,而误差大小应与上述设计的验前精度一致,即水平方向中误差0.5″,测距中误差2 mm+2 mm/km。根据偶然误差服从正态分布的性质和Box– Muller算法[13-14],利用 VS 平台的 C#语言,编写为洞内仿真控制网观测值平差文件自动添加服从正态分布规律的随机误差(下称随机误差)的程序。
为了验证添加误差的正态性,利用所编程序进行3次实验,每次实验生成1 632个随机数,然后计算随机数样本的标准差、均值等指标,计算结果如表1所示。

表1 随机数的分布规律统计Table 1 Statistical table for the distribution of random numbers
从表1中数据不难发现,3次实验样本均值都在0 mm附近,样本标准差与设计标准差接近,且小于标准差的随机数个数占样本总数的67.5%左右,可见上述随机数都符合正态函数的分布规律。因此根据Box-Muller算法编写的该程序生成的随机数符合偶然误差的统计规律,能够模拟偶然误差的一般情况。
利用上述算法,对仿真控制网平差文件中的观测值添加符合验前精度的随机误差,模拟隧道实际测量时观测值中包含偶然误差的情形,再对包含随机误差的观测值分别按照Helmert方差分量估计定权方法[15]进行定权,最后对仿真的洞内控制网进行平差计算,从而完成对设计控制网的仿真计算。
3 贯通误差的计算
在洞内控制网设计阶段,应对洞内横向贯通中误差进行估算。其估算的基本方法为:在上述所构建的仿真控制网中间假设一个虚拟贯通面,把洞内控制网分成2段;根据以上公式开列误差方程,根据以上设定的验前精度按常规定权法确定观测值权;组成法方程并计算该网未知点坐标的协因数阵;最后根据先验精度和协因数阵,就可以求出贯通点的横向点位中误差,再通过误差传播定律按下式求出洞内横向贯通中误差:

式中:m内贯为估算得到的洞内横向贯通中误差;m贯小为小里程段控制网估算得到的贯通点横向点位中误差;m贯大为大里程段控制网估算得到的贯通点横向点位中误差。对于高速铁路而言,不同长度隧道最终估算得到的洞内横向贯通中误差m内贯应满足表2洞内横向贯通中误差的要求[5-6]。

表2 隧道洞内横向贯通误差规定[6]Table 2 Limited error of in - tunnel lateral transfixion MSE[6]
当隧道贯通后,应对隧道实际横向贯通误差进行计算。其仿真计算方法为:在构建的仿真控制网中间假设一个虚拟贯通面,将整网从贯通面处断开,得到小里程段与大里程段2个相互独立的仿真控制网;根据Box–Muller算法,为小里程段和大里程段的控制网分别添加满足验前精度的随机误差;根据间接平差的计算方法,对小里程段和大里程段2个独立的控制网分别进行平差计算,计算贯通点2套坐标的差值,该偏差值在隧道贯通面上的投影即为隧道横向贯通误差。由于本文构建的仿真控制网X轴与隧道中线平行,Y轴与隧道贯通面平行,因此贯通点的2套Y坐标之差即为隧道仿真控制网的实际横向贯通误差:

式中:△Y为隧道横向贯通误差;Y小为贯通点在小里程段控制网平差后的横向坐标;Y大为贯通点在大里程段控制网平差后的横向坐标;△Y应满足表2横向贯通限差的要求[6]。
4 计算实验
根据构建的隧道4种仿真控制网以及精度估算的方法,将 4.2,6.0,8.1,10.2,13.2,16.2,20.1,25.2和30.0 km等9种长度隧道的洞内4种控制网从中间断开,然后按式(4)计算贯通点处(即断开处)的横向贯通中误差,结果如图6所示。
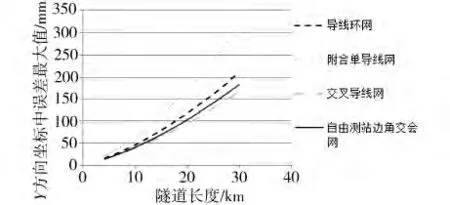
图6 4种隧道控制网精度估算洞内横向贯通中误差最大值统计Fig.6 Statistical graph of the max lateral breakthrough mean square error for four types of control networks in tunnel using accuracy estimation
从图6可以看出:当测量精度达到方向中误差0.5″和测距中误差2 mm+2 ppm,且观测值不包含显著系统误差时,附合单导线不能满足表2洞内横向贯通中误差的限差要求,其他3种网型的洞内控制测量方法均能满足该要求。附合单导线的横向贯通中误差最大;15 km以下时,自由测站边角交会网的精度与交叉导线网精度几乎相同,考虑到隧道洞内导线的角度测量不可避免会到旁折光影响,而自由测站边角交会网的测站架设在线路中线附近,可以很好地避免隧道旁折光对角度测量的影响,因此自由测站边角交会网的实测精度理论上应优于各种导线网的精度。
为了研究隧道的横向摆动规律,根据构建的隧道4种洞内仿真控制网以及仿真计算的方法,选取10.2 km长的隧道,将其从中间断开,对每种网型的小里程段和大里程段分别仿真计算1 000次,统计贯通点“CP036”的横向贯通误差,以每10 mm为一个区间,统计贯通点“CP036”的横向贯通误差在各个区间内的出现次数,统计结果如图7所示。由于该仿真实验计算量较大,因此传统网平差速度不能满足实验要求。根据稀疏矩阵的特性[16-18],本文利用“稀疏矩阵的行列压缩技术”,对控制网进行快速平差计算,从而完成上述仿真实验。
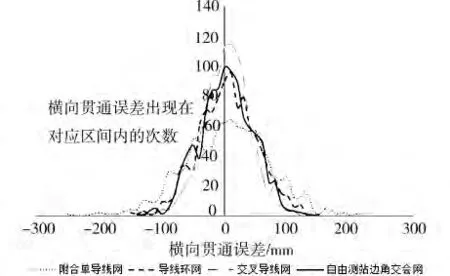
图7 贯通点“CP036”在4种洞内控制网测量方法中横向贯通误差统计Fig.7 Statistical graph of the lateral breakthrough error for the through point“CP036”in four types of control networks inside tunnel
由图7不难发现:(1)4条曲线均近似关于纵轴对称,因此长大隧道洞内平面控制网的左右摆动方向应该是等可能性的;(2)横向贯通误差小的出现次数远远大于横向贯通误差大的出现次数;(3)结合图6可知,仿真计算横向贯通误差的最大值约为精度估算得到的横向贯通中误差的3倍;(4)统计图的形状与正态分布的概率密度函数曲线类似,因此统计1 000次仿真计算横向贯通误差的标准差,如表3所示。

表3 4种隧道平面控制网仿真计算1 000次的横向贯通误差统计Table 3 Statistical table of the lateral breakthrough error for four types of horizontal control networks in tunnel with each 1 000 times of simulation
由表3数据可知:4种控制网在贯通点的横向贯通误差均值在0 mm附近,即洞内控制网总体上在设计中线位置附近摆动,且左右摆动的概率相等;横向偏差小于标准差的概率在69%附近,结合图7不难发现,无论图形上,还是统计数据,横向贯通误差都符合正态分布规律。因此仿真计算的统计结果表明,洞内控制网横向左右摆动的情况是等可能性的,摆动大小服从正态分布的统计规律。
5 结论
1)在不考虑旁折光、对中误差影响的情况下,无论是精度估算,还是模拟的仿真平差计算,4种网型中,附合单导线网的精度最低,自由测站边角交会网与交叉导线,在控制网长度小于15 km时的精度几乎相同。考虑到隧道测量中旁折光与对中误差的影响是无法避免的,且自由测站边角交会的测量方式消除了仪器和棱镜的对中误差影响,因此实际测量中,自由测站边角交会网的精度应优于其他3种导线控制网,可利用该方法代替传统的导线网,以提高隧道横向贯通精度。
2)仿真计算的4种隧道控制网在贯通面处的横向摆动均服从正态分布的统计规律,在系统误差不显著的情况下,多次独立测量的平差结果,其均值应在真值附近,因此适当增加测量次数,选择均值附近的测量结果,可消减隧道控制网的横向摆动,提高隧道的横向贯通精度。
3)采用本文的方法,可对各种长度和各种精度要求的隧道洞内控制网的精度进行估算,对其横向贯通误差进行仿真计算,这对洞内控制网的测量设计非常有用,可确保长大隧道的正确贯通。
[1]路伯祥,许提多,黄丁发,等.GPS在铁路隧道平面控制测量中的应用[J].铁道学报,1995,17(2):60-66.
LU Boxiang,XU Tiduo,HUANG Dingfa,et al.Application of GPS in tunnel horizontal control surveying[J].Journal of the China Railway Society,1995,17(2):60-66.
[2]邓川.现代长大隧道洞内控制测量与监测技术研究[D].成都:西南交通大学,2012:1.
DENG Chuan.Research on control survey and monitoring technology inside the modern long-and-large tunnel[D].Chengdu:Southwest Jiaotong University,2012:1.
[3]罗永康,卢勇,冉伟.超长巷道贯通误差分析与处理[J].矿山测量,2011(6):81-83.
LUO Yongkang,LU Yong,RANG Wei.Analysis and processing of through error in long tunnel[J].Mine Surveying,2011(6):81 -83.
[4]杜传鹏.长大隧道贯通误差分析及程序实现[D].成都:西南交通大学,2013:1.
DU Chuanpeng.Analysis and program Implementation of long tunnel through observation error[D].Chengdu:Southwest Jiaotong University,2013:1.
[5]刘成龙,金国清,杨雪峰,等.自由测站边角交会网在高铁隧道洞内平面控制中的应用研究[J].西南交通大学学报,2014,49(1):1-7.
LIU Chenglong,JIN Guoqing,YANG Xuefeng,et al.U-sing free-station linear-angular intersection network in tunnel horizontal survey of high - speed railway[J].Journal of Southwest Jiaotong University,2014,49(1):1-7.
[6]TB 10621-2009,高速铁路设计规范[S].
TB 10621-2009,Code for design of high speed railway[S].
[7]TB10601-2009,高速铁路工程测量规范[S].
TB10601-2009,Specifications for survey engineering of high speed railway[S].
[8]武汉大学测绘学院.测量平差学科组编著.误差理论与测量平差基础[M].武汉:武汉大学出版社,2005.
Wuhan University Institute of Surveying and Mapping Surveying Adjustment Discipline Groups.Error theory and foundation of surveying adjustment[M].Wuhan:Wuhan University press,2005.
[9]白云贵,杨雪峰,周凌焱,等.基于自由测站的基坑水平位移监测精度探讨[J].铁道勘察,2013(6):6-8,27.
BAI Yungui,YANG Xuefeng,ZHOU Lingyan,et al.A discussion based on free-station about the accuracy of foundation pit horizontal displacement monitoring[J].Railway Investigation and Surveying,2013(6):6 - 8,27.
[10]陈海军,刘成龙,付恒友,等.高速铁路轨道基准网平面网构网测量及严密平差方法研究[J].铁道科学与工程学报,2011,8(4):55-60.
CHEN Haijun,LIU Chenglong,FU Hengyou,et al.Research on the network-constructed measurement and strict adjustment methods in the plane network of track reference network of high - speed railway[J].Journal of Railway Science and Engineering,2011,8(4):55 -60.
[11]刘成龙,杨友涛,徐小左.高速铁路CPⅢ交会网必要测量精度的仿真计算[J].西南交通大学学报,2008,43(6):718-723.
LIU Chenglong,YANG Youtao,XU Xiaozuo.Simulated determination of accuracy requirement for control pointsⅢ intersection networks in high - speed railway[J].Journal of Southwest Jiaotong University,2008,43(6):718-723.
[12]罗远刚,刘成龙,杨雪峰,等.普速铁路新型轨道控制网平面网建网方法及精度探讨[J].铁道科学与工程学报,2014,11(1):55-59.
LUO Yuangang,LIU Chenglong,YANG Xuefeng,et al.A new method for establishment of plane network of ordinary-speed railway track control network and its accuracy discussion[J].Journal of Railway Science and Engineering,2014,11(1):55-59.
[13]BOX G E P,MERVIN E.A note on the generation of random normal deviates[J].The Annals of Mathematical Statistics,1958,29(2):610-611.
[14]吉江,金梁,黄开枝.基于人工噪声的MISO保密容量分析[J].通信学报,2012,33(10):138-142.
JI Jiang,JIN Liang,HUANG Kaizhi.Secrecy capacity analysis of MISO system with artificial noise[J].Journal on Communications,2012,33(10):138 -142.
[15]王磊,刘成龙,杨雪峰,等.高速铁路自由设站3维整体平差计算及精度评定[J].测绘科学技术学报,2011,28(4):258-261.
WANG Lei,LIU Chenglong,YANG Xuefeng,et al.Three-dimensional adjustment calculation for free station and its precision evalution in high-speed railway[J].Journal of Geomatics Science and Technology,2011,28(4):258-261.
[16]Timothy A D.A combined unifrontal/multifrontal method for unsymmetric sparse matrices[J].ACM Transactions on Mathematical Software,1999,25(1):146-155.
[17]Michele B,Carl D M,Miroslav T.A sparse approximate inverse preconditioner for the conjugate gradient method[J].SIAM J Sci Comput,1996,17(5):1135 -1149.
[18]Timothy A D,Iain S D.A combined unifrontal/multifrontal method for nsymmetric sparse matrices[R].Computer and Information Science and Engineering Department,University of Florida,1997,5(3):743 -751.
