机场场监雷达数据处理技术研究
2015-01-01张煜婕李文娟陈建军
张煜婕,李文娟,陈建军
(1.南京电子技术研究所, 南京210039;2.南京理工大学电光技术学院,南京210094)
0 引言
民航业发展初期,各国对机场的监视和管理是通过塔台管制员目视和地勤人员人为干预实现。随着全球航空运输业的飞快发展,机场内交通流量、布局的日益复杂,仅靠人为干预已经远远不能满足机场管控要求。
基于对目标的雷达回波的测量、数据分析、建模和计算,场面监视雷达(Surface Movement Radar,SMR)可以确定运动目标的具体位置,实现航空器和车辆驾驶员在自己的航空器或车辆内就能看到自身所处的位置,以及周围场面的运行状况,在发生危险的时候能够及时获得报警信息。在此过程中,由于SMR是对机场区域进行探测,即对地俯视探测,因此在其探测范围内将会受到大量强地杂波的干扰。再加上机场内人员、车辆移动状态的机动性,障碍物遮挡,以及天气等因素的影响,即使采用信号处理中常用的MTI或MTD技术后,虚警率依然很高,运用常规的目标跟踪算法将会导致机场内目标错跟、丢失,在机场发生事故时不能及时产生告警,酿成无可挽回的损失。为了解决以上问题,本文提出将检测前跟踪(TBD)技术应用于对SMR数据处理分系统中。TBD技术是一种针对低信噪比条件下信号的检测和跟踪技术,最初主要应用于红外弱目标的检测跟踪,近年来TBD检测算法也应用到雷达系统中。常用的TBD方法有基于Hough变换的直线航迹积累法[1-2],基于粒子滤波的递归方法[2-4]以及基于动态规划的能量积累法[2,5-7]。
本文通过对民航机在机场场面运动的过程的分析,以及对大量实测数据积累和统计,将TBD技术应用于SMR的数据处理分系统中,在目标跟踪过程中,依据事先存储的机场地理信息和雷达回波信息,将机场区域分为机场跑道区、航迹不起批区、航迹禁止区,指导场内目标跟踪模型选择的同时,对不符合该区域允许的运动状态的异常情况及时告警,保证机场及航空安全。
1 机场目标运动状态及数据仿真
为简便起见,以机场某条道路为例,如图1所示,飞机在该道路上完成从滑行、转弯,到静止待命,直至加速起飞的全过程(降落是起飞的逆过程),根据机场道路功能的不同,将这条道路分为4块,其中A为滑行道,B为滑行道与跑道连接处,C为目标静止待命区,D为飞机起飞降落跑道。根据区块功能的不同,目标按照不同的模型进行运动。以飞机起飞过程为例,飞机运动包含三种运动,在滑行道A上匀速运动(Constant Velocity,CV),在跑道与滑行道连接处B做匀速转弯运动(Constant Turn,CT),在C区域静止待命,在跑道D上匀加速运动(Constant Accelerator,CA)。各个运动模型在很多文献中已进行多次给出,此处不再赘述。
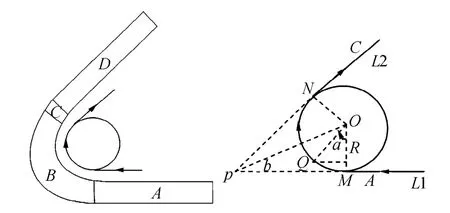
图1 机场道路示意图
以某飞行器起飞过程为例,如图1右图,L1和L2是两条滑行道,其中L2为飞行器起飞跑道,它们之间夹角为b,转弯圆弧半径为R,PM方向为x轴正方向,L1与x轴重合,此时的坐标原点设为P点,即(x0,y0)=(0,0)。弯道的起始点M的坐标设为(xM,yM),弯道结束点N点的坐标设为(xN,yN)。过N点做L1的垂线,与弯道MN相交于Q点,MQ转过的角度为a。飞行器起飞过程中走过的总路程为

设飞行器初始位置坐标为(x0,y0),具体起飞仿真过程如下
(1)滑行道匀速滑行阶段:总滑行长度L1=x0-xM;
(2)匀速转弯阶段:
此时,yM=0,在x方向的坐标为

弯道结束点N点的坐标设为(xN,yN),其表达式为
飞行器在弯道上走过的弧长MN用下面的式子计算

(3)匀减速运动阶段:
该阶段直到飞行器速度减为0,走过路程为Sslip;
(4)静止候命阶段;
加速起飞阶段:飞行器由速度为0到离地起飞,本文中设起飞离地速度为350 km/h,走过路程为Sup。

仿真场景如图2所示,其中星点为雷达所在位置。
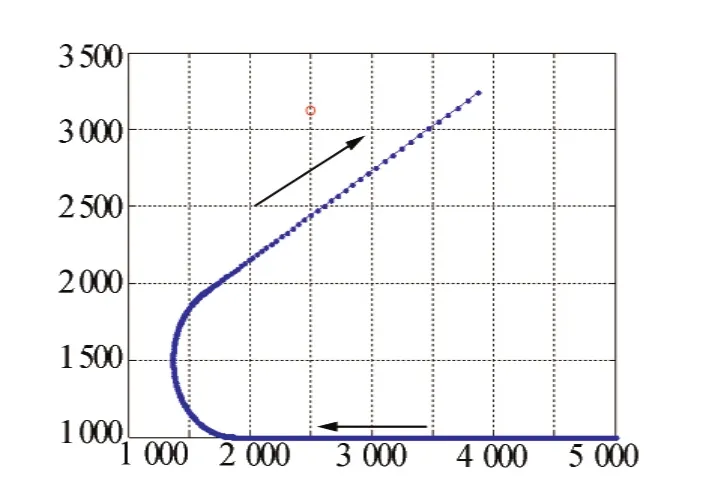
图2 飞机起飞过程数据仿真
2 SMR数据处理关键技术
TBD基本思想是利用多周期积累数据,对目标所有可能的航迹进行遍历、估计,当确认目标检测结果后,检测结果与目标航迹同时报出。其关键是对通过航迹关联遍历和延迟决策所产生的大量假设的暂态航迹进行及时判断,删除虚假航迹,保留真实航迹。对于航迹起始和航迹关联的具体处理方法,文献中已有详细介绍,这里不再累述。TBD数据处理的基本流程如图3所示。

图3 TBD基本处理流程图
处理过程对计算机硬件要求很高,需要多个服务器和存储器来并行计算并存储这些航迹,以满足航迹关联遍历以及延迟决策的需要。再加上SMR对地探测中产生的大量剩余杂波,包括地面建筑物、人员车辆的运动状态的机动、建筑物的遮挡、以及恶劣天气产生异常回波等,都会产生大量虚假航迹,增加计算机硬件压力,对航迹跟踪产生不利影响。
由于SMR是针对机场场面进行监视,探测场景和探测对象都相对固定,机场场面布局图、目标类型、运动状态信息均可作为先验信息,建立信息数据库,参与到数据处理过程中,流程图如图4所示。
2.1 特殊航迹区处理
由于地物杂波剩余点迹、机场飞机点迹等点迹具有特殊的属性,为减少虚假航迹的形成,通常根据机场场面布局图设置特殊航迹区,对上述区域内的点迹进行相关处理时采取不同的准则或相关处理方法。本文中的特殊航迹处理区包括:不起批区、禁止区和机场跑道区等。
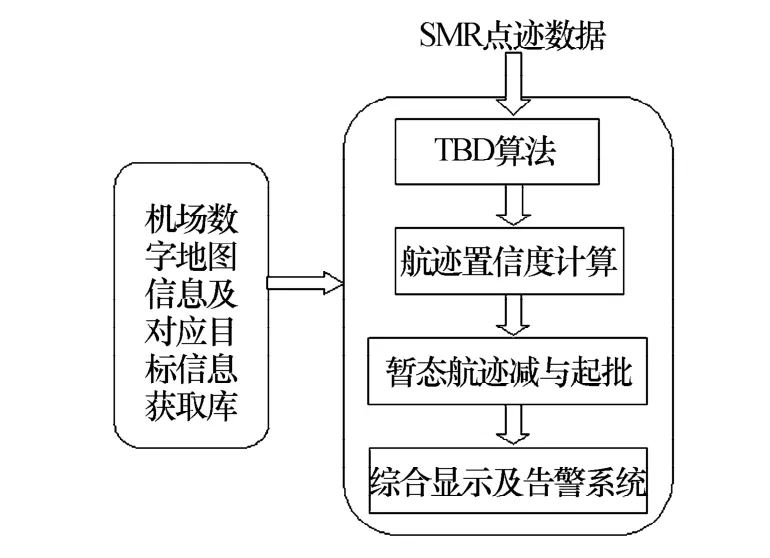
图4 SMR数据处理流程
不起批区:在该区域内的点迹禁止形成新航迹但可用于航迹的更新。该区域主要对应目标受到建筑物遮挡区域,或目标经过剩余杂波集中的机场区域等情况。
禁止区:在该区域内的点迹禁止用于形成新航迹,若有稳定航迹连续多个周期(超过三次)与该区域内的点迹相关,并形成高置信度的航迹,则认为出现异常状态,处理系统将向显控系统提出告警。该区域主要对应机场内的建筑物区、草坪区等。
机场跑道区:利用区域内点迹进行航迹更新或形成新航迹遵循以下准则:(1)按照跑道区功能不同,采取不同的航迹跟踪参数设置;(2)禁止目标点迹产生切向加速度。这样可避免形成虚假航迹或航迹更新出现错误。
2.2 航迹置信度的设计
如何既利用TBD思想发现并准确跟踪目标,又不会使计算机运算存储量爆炸,本文采用如下关键技术:(1)对每条航迹遍历其所有可能关联的点迹;(2)设计合理的航迹置信度,逐帧删除大量置信度低的暂态航迹;(3)建立完善的航迹起始和航迹撤销逻辑,根据置信度自适应调整航迹起始、撤销时间,使置信度低的暂态航迹起批时间长,置信度高的确认航迹维持时间长。
下面重点介绍一下航迹置信度的设置。
本文采用贝叶斯规则[7]与目标幅度特性、运动状态平稳特性相结合,来计算航迹置信度[8-10]。
传统的贝叶斯置信度定义P(D/T)为暂态航迹中量测数据为真实目标的几率,P(D/F)为暂态航迹中量测数据为假目标的几率,Lk为某条航迹在k时刻收到潜在目标信号的概率,P(T/Dk)表示组成这条航迹的序列量测数据Dk为真实目标的几率,P(T/Dk)可以通过递归的方式给出[11]

为了计算Lk,我们首先计算P(D/T)和P(D/F),对于一个真实目标,P(D/T)等于系统的探测概率Pd与潜目标数据关联的似然函数的积,假定在航迹点估计过程中,卡尔曼滤波器的残差呈高斯分布,则似然函数可以定义为
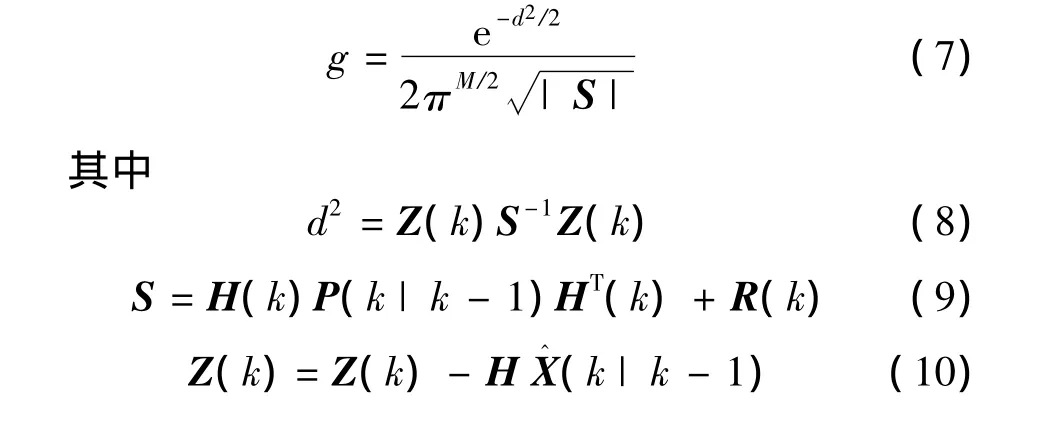
M为量测数据的维数,对于SMR,M=2(距离、方位),X^(k|k-1)为卡尔曼滤波器中的目标状态一步预测向量,Z(k)为量测向量,H(k)为量测矩阵,R(k)为量测协方差矩阵,P(k|k-1)为一步预测协方差矩阵。同样的P(D/F)简单地表示为潜在目标数据的虚警概率Pf乘以在门限区域Vg内均匀分布的虚警的似然函数1/Vg。
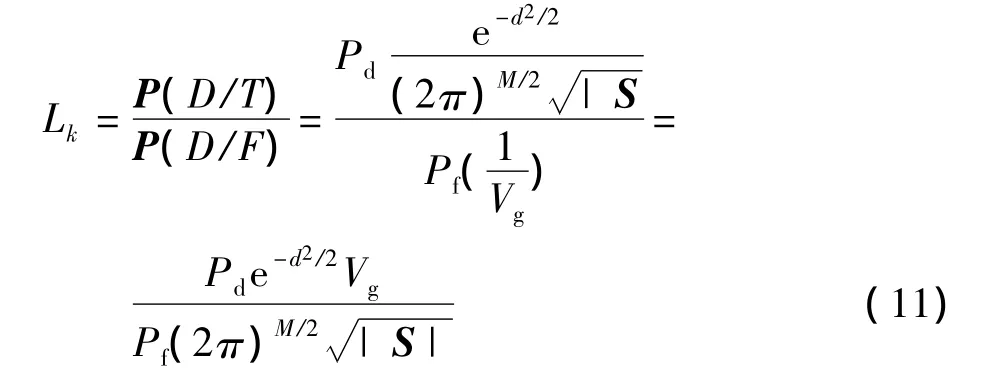
由于Pf=βfVg,其中βf为虚警或者杂波密度,此时Lk可以表示为
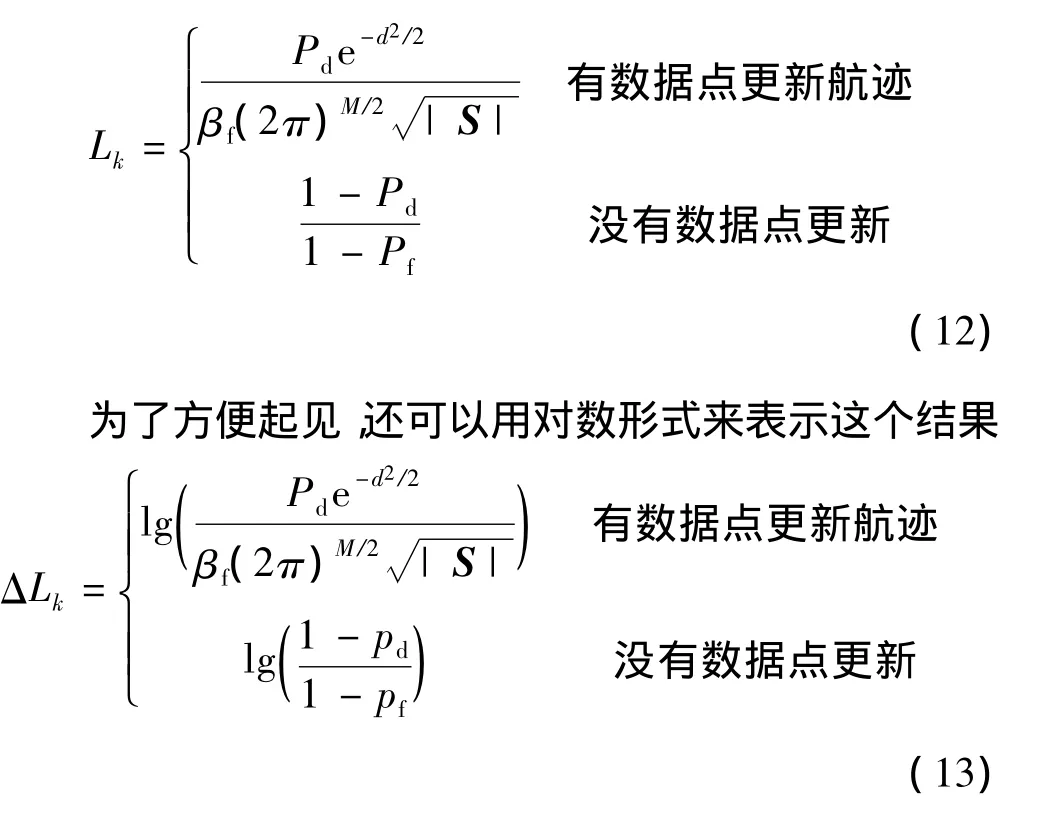
所需要的航迹置信度由式(13)计算得到。一般认为每次扫描探测到的潜在目标数据是相互独立的,经过k次扫描后,具有对数形式的航迹评价函数Lk是每一次单独扫描的航迹置信度的和,则航迹置信度可以通过递归的方法得出

对于新的航迹,可以通过下式来初始化航迹的置信度。

式中:βN为目标密度。
下面对航迹置信度的计算方法进行总结:航迹起批后利用公式(15)对每条航迹置信度进行初始化,在后续的每一个扫描周期,用公式(13)计算航迹置信度的增量,通过公式(14)逐扫描周期更新航迹置信度。
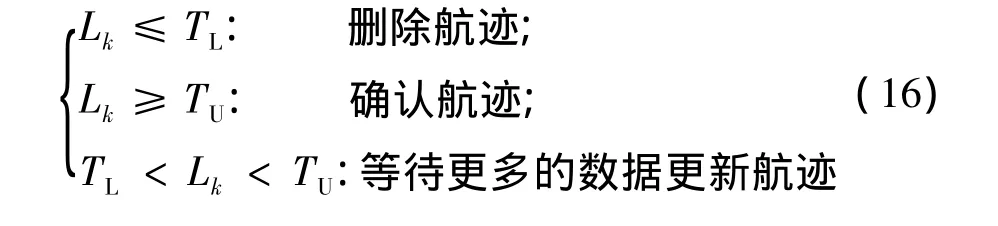
同时定义TL为航迹的删除阈值,TU为航迹确认阈值,每一次数据关联之后通过(14)计算出每一条航迹的置信度,然后通过序列几率比测试判断航迹的存在与否。序列几率测试的判据如下
式(13)所示的传统的航迹置信度,取决于目标预测值与量测值之间的距离d(当跟踪滤波收敛时,S趋于一个固定值),即d值越小,目标量测值与航迹预测值越接近,说明该量测值与航迹关联的概率越大[12]。
而本文中的暂态航迹点保留点迹的幅度信息、尺寸信息以及目标的速率、航向等信息,将这些信息用于航迹置信度的计算中,使暂态航迹的起批与删减规则更加全面细致,更有说服力,同时对减少每帧数据的运算量效果明显。以某条暂态航迹的N帧速率为例,我们认为真正的机场地面目标在某一区域内的运动速率是在一定范围内的,设航迹中第i点的速率为 ,则N帧的速率均方差为
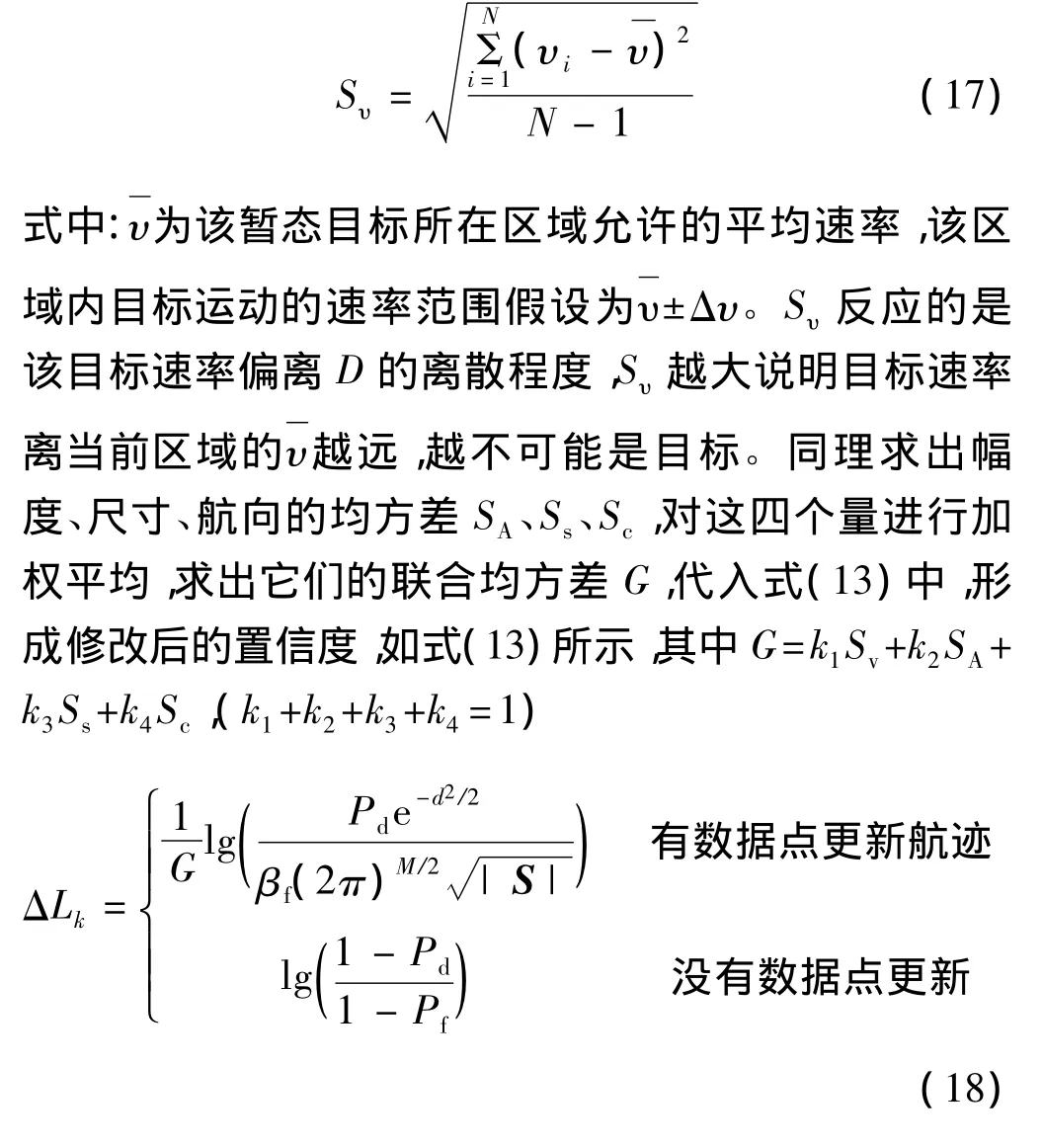
3 SMR数据处理结果分析
在事先建立的机场数字地图的基础上对机场区域按照不同功能分区,在各个区域中可能出现的目标类型、运动特性等信息建立数据库,在数据处理的整个过程中,利用该数据库信息,实现对已起批目标类型的识别、跟踪,对虚假航迹的删减,并对运动状态异常的目标进行标示告警。
仿真3个飞行器降落、起飞的过程。设飞机起飞跑道长度2.5 km,离地速度为350 km/h,转弯半径500 m,两跑道之间夹角为60°,滑行道长度3.1 km,滑行速度为20 km/h,仿真过程持续1 102 s,雷达扫描周期为1 s。以雷达为坐标原点进行仿真。其中有3个飞行器目标,目标运动情况如表1所示。
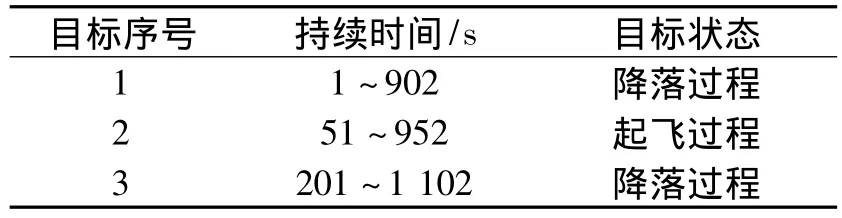
表1 三个目标仿真状态
处理结果如表2所示,其中原始虚警密度指每一帧数据中平均虚警点的密度。对于三种虚警密度的情况,算法对目标都有较好的跟踪性能,且对虚警抑制效果很好,对于速度变化范围大、虚警点多的机场环境,基于TBD的数据处理算法对目标也有良好的跟踪性能。
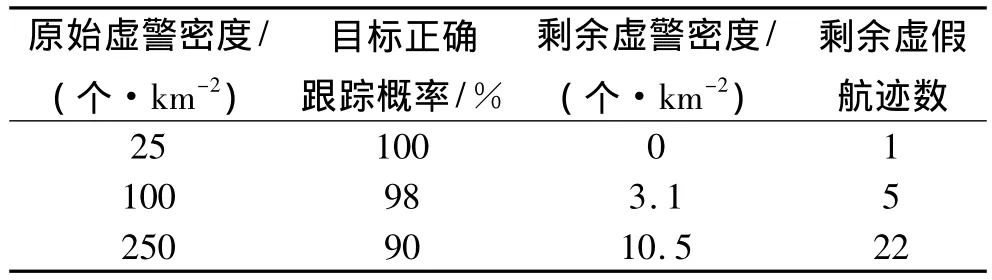
表2 仿真数据处理结果
采用以上算法对国内某机场上多种情况实测数据进行处理。图5所示的是两架在机场中运动过程的跟踪结果。为了便于观察,本文将目标的航迹点结果进行像素扩展。左图为一架客机由起点出发,经过转弯滑行至飞机跑道起点,并静止等待起飞指令的过程;右图为一架货机由机场的机库出发,经滑行道至跑道起点,经过静止等待、加速滑行直至最后起飞的全过程。下图表明,对于机场中处在不同运动状态的飞机目标,该算法均表现出良好的跟踪性能。
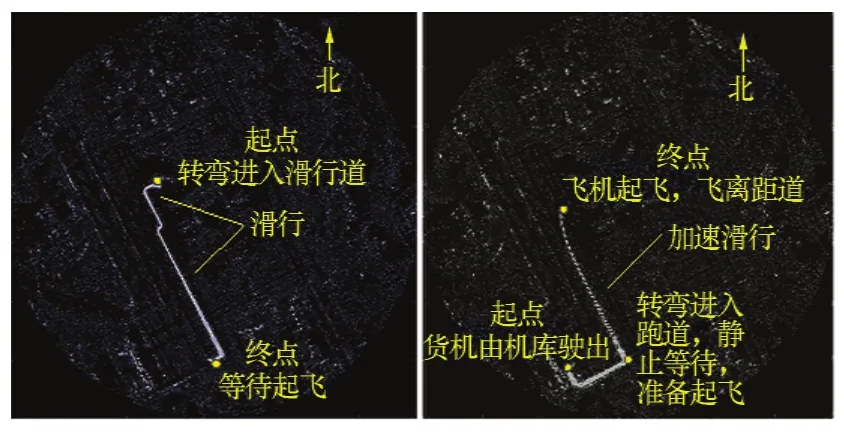
图5 对某机场上两架飞机的跟踪结果
4 结束语
本文针对机场场监雷达的实际需求,分析并仿真机场内民航机起飞过程,针对机场内地面目标运动模型多样,虚警率高的缺点,探讨了基于TBD思想的场监雷达数据处理算法,为了解决算法中计算量和存储量爆炸的问题,采取机场特殊区域处理措施,对特殊区域内的航迹进行特殊处理,同时监控目标的运动状态,在发生异常状态时,及时对后续显控告警系统报告,产生告警,确保机场及飞机的安全;因此,设计新的置信度计算方法,既保证大量虚假目标逐帧删减,又确保真实目标的连续跟踪。经过仿真数据以及某机场实测数据的验证,该算法在保证较低运算量和存储量的同时,对目标具有良好跟踪性能,可应用于工程实践。
[1] Carlson B D,Evans E D,Wilson S L.Search radar detection and tracking with the hough transform.Part I:system concept[J].IEEE Transactions on Aerospace and Electronic System,1994,30(1):102-108.
[2] 张承志,任清安.一种利用TBD自动检测低慢小目标的方法[J].空军预警学院学报,2013,27(2):118-121.Zhang Chengzhi,Ren Qingan.Method of auto-detection of LSS target by using TBD technology[J].Journal of Air Force Radar Academy,2013,27(2):118-121.
[3] Rutten M G,Gordan N J,Maskell S.Recursive track-before-detect with target amp latitude fluctuations[J].IEE Proceeding Radar,Sonar and Navigation,2005,152(5):345-352.
[4] Boer Y,Driessen J N.Multi-target particle filter track-before-detect application[J].IEE Processing Radar,Sonar and Navigation,2004,151(6):351-357.
[5] Arnold J,Shaw S,Pasternack H.Efficient target tracking using dynamic programming[J].IEEE Transactions on Aerospace and Electronic Systems,1993,29(1):44-56.
[6] Tonissen S M,Evans R J.Performance of dynamic programming techniques for track-before-detect[J].IEEE Transactions on Aerospace and Electronic Systems,1996,32(4):1440-1451.
[7] 宫淑丽,王帮峰,吴红兰,等.基于IMM算法的机场场面运动目标跟踪[J].系统工程与电子技术,2011,33(10):2322-2326.Gong Shuli,Wang Bangfen,Wu Honglan,et al.Tracking of moving targets on airport surface based on IMM algorithm[J].Systems Engineering and Electronics,2011,33(10):2322-2326.
[8] 吕小平.空中交通管理文集[M].北京:航空工业出版社,2009.Lü Xiaoping.The corpus of air traffic management[M].Beijing:Aviation Industry Press,2009.
[9] 金 文.场面监视雷达的应用与发展[J].中国民用航空,2011,129(9):48-50.Jin Wen.The application and development of surface monitoring radar[J].China Civil Aviation,2011,129(9):48-50.
[10] 霍振飞.高级机场场面活动引导控制系统介绍[J].空中交通管理,2011(8):4-5,16.Huo Zhenfei.Introduction to advanced-surface movement guide and control system[J].Air Traffic Management,2011(8):4-5,16.
[11] 何 友,修建娟等.雷达数据处理及应用[M].2版.北京:电子工业出版社,2009.He You,Xiu Jianjuan.Radar data processing with applications[M].2nd ed.Beijing:Publishing House of Electronics Industry,2009.
[12] 曾 斯.多机动目标跟踪中数据关联算法的研究[D].成都:电子科技大学,2011.Zeng Si.A study on data association algorithms of multitarget tracking[D].Chengdu:University of Electronic Science and Technology of China,2011.
