基于视频图像分析的自动报靶方法研究
2015-01-01刘秋燕陈耀武
刘秋燕,陈耀武
(浙江大学数字技术及仪器研究所,杭州310027)
1 概述
随着军队信息化程度的提高,自动报靶技术在军警射击训练中得到了越来越广泛的应用。与传统的人工报靶方法相比,自动报靶方法更安全可靠高效,能有效克服人工报靶产生的人为误差,满足军事训练现代化需求,提高部队射击训练水平[1]。
目前国内很多研究所相继开发出了多种自动报靶系统,但是应用场景和报靶精度各有不同。声电定位报靶系统精度较高,但应用成本也高且系统复杂,射击后无弹孔作为成绩核查依据;双层电极短路自动报靶方法较成熟,但检测精度低且成本高;半导体电子靶系统最大的特点是系统设计简单且维护方便,但电子靶成本太高,目前只应用于大型国际性射击比赛;基于图像处理技术的自动报靶方法研究对象多为圆环靶,且精度不高,主要供竞技比赛使用[2-3]。因此,现有的报靶系统难以满足军警靶场野外实弹射击的强适应性和高精度要求[1]。
本文结合机器学习算法和图像处理技术,提出一种新的自动报靶方法。首先提取不同环境条件下的靶图特征,并应用Boosted Cascade算法训练分类器;然后对靶图进行图像处理,使用霍夫变换和弹孔差影法求取靶心和弹孔位置;最后计算弹孔环值,输出射击成绩。
2 自动报靶方法实现
2.1 自动报靶过程
本文提出的自动报靶方法实现过程如图1所示。研究场景为军警靶场,射击靶为标准军用胸型靶,图像采集设备为高清摄像机。整个方法包括3个部分:图像预处理、靶图识别和弹孔识别。靶图识别又可细分为Haar特征提取、分类器训练以及运用分类器识别靶图。弹孔识别分为靶心识别、环线半径识别、弹孔识别以及成绩计算。
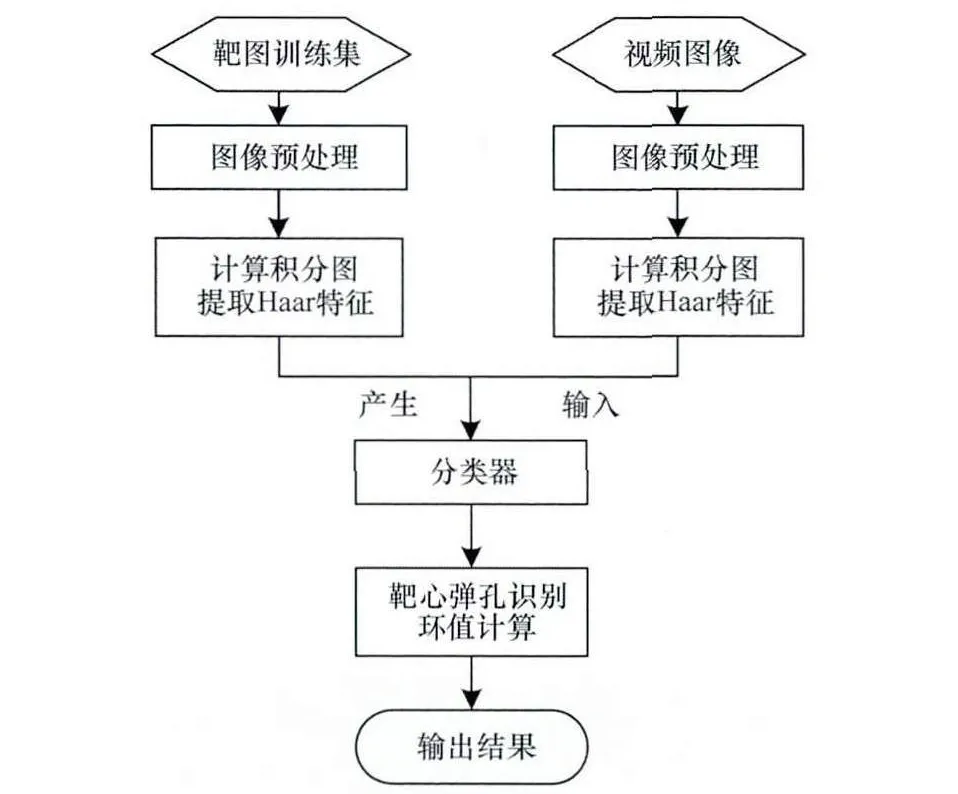
图1 自动报靶方法实现过程
2.2 图像预处理
在本文方法所使用的系统中,靶面图像由摄像机拍摄所得,通过图像预处理能够改善图像质量,提高靶图识别的准确度。
图像预处理主要包括图像灰度化和图像滤波处理。图像灰度化处理可利用RGB空间到灰度空间的转换实现,得到的灰度图是以牺牲色调和饱和度为代价的,不影响靶图中的边缘和轮廓信息[4]。
靶面图像在采集和传输处理过程中可能受外部噪声和内部噪声的干扰和影响,因此,需要进行滤波处理,本文采用中值滤波方法。经过中值滤波能有效滤除图像中夹杂的噪声信息,特别是数字周围由于光照因素造成的噪点,同时保留图片的轮廓信息[5]。
经过预处理的靶图效果如图2所示,图2(a)是原始靶图,图2(b)是经过灰度化和滤波处理的靶图。

图2 靶图预处理
2.3 靶图识别
靶图识别过程使用预先训练好的分类器对视频序列中的图像进行分类并输出靶图。分类器的训练采用Boosted Cascade算法,该算法的设计思想[6-7]是通过学习建立多层级联结构的分类器,最终形成一个有效的分类器。每一级分类器都对应一个或多个能够区分目标对象的“弱特征”(并不是对象的全部特征),只有最终能够通过所有分类器的图片被认为是需要的目标图片。一般而言,级数越高,所包含的目标对象特征越复杂。
2.3.1 弱特征选取
本文方法选取的弱特征是Haar特征,该特征是由Viola等人[8]在其人脸检测系统中引入的一种简单矩形特征,能够反映图像的灰度变化情况,因此,同样适用于检测胸型靶。Haar特征模板含有白色和黑色2种矩形,并定义模板特征值为白色矩形像素和与黑色矩形像素和之差。算法中使用积分图[9](Integral Image)的方法,遍历一次图像得到图像的积分图,之后任一矩形的特征可通过其4个顶点的积分图值计算得到。
2.3.2 分类器训练
一个典型的N级分类器的结构[10]如图3所示,假设每一级分类器消除负样本的概率为h,将正样本错误消除的概率为f,那么经过N级分类器后,检测率hitrate=(1-f)N,虚警率为falsealarm=hN。

图3 N级分类器结构
从图3的分类器结构和Boosted Cascade算法原理可知,分类器训练主要包括以下3个步骤:
(1)确定训练集:训练集的选择对提高靶图识别率和适应性有重要作用。考虑到野外实弹射击可能遇到的复杂天气情况,本文方法收集包括晴天、阴天不同光照条件以及不同时间段的正负样本集。
(2)确定分类器级数、检测率和虚警率:由于本方法用于训练的样本数量较大,为了更好地训练分类器需要设置较大的级数和较高的错误消除概率。所以设置分类器级数N=20,负样本消除概率h=50%,正样本错判概率f=0.05%。
(3)学习训练:将初始样本集输入分类器,每一级分类器都对样本集进行分类,前一级分类器的输出结果作为后一级分类器的输入。低层次的分类器使用较少特征快速排除掉大量明显的非靶面图像,随着级数增加,检测特征数目也增加,以此提高靶图识别精度。
至此,靶图分类器已训练完成,将此分类器应用到摄像机采集到的视频图像,即可快速识别出靶图。
2.4 弹孔提取与环值计算
弹孔提取与环值计算是自动报靶技术的另一个核心部分,主要包括:靶心坐标和环线半径提取,弹孔识别以及环值计算[11]。
2.4.1 靶心坐标和环线半径提取

靶心是一个标准圆,使用霍夫变换来识别靶心坐标和半径[13]。设靶心圆的方程为:(x-a)2+(y-b)2=r2((a,b)为圆心,r为半径),通过霍夫变换,将图像空间对应到参数空间。对于图像空间中圆周上任意一点均对应于参数空间中一个三维锥面,而对于空间中满足圆周的全部点,则对应于参数空间的一组圆锥面簇。所以对图像上每一个像素点计算(a,b,r)并累计次数,次数最大值对应的(a,b,r)就是图像空间中所求圆周的圆心坐标和半径[14]。靶心识别结果如图4(c)所示。

图4 靶心坐标与环线半径提取
2.4.2 弹孔识别和环值计算
在实弹射击训练中,训练员进行连续射击,在靶图像上将会出现多个弹孔,所以,本文在传统的基于时间序列图像的差影法上进行改进,提出了一种基于弹孔的差影法来识别连续弹孔。与基于时间序列图像的差影法相比,该改进方法能在一定程度上降低靶面抖动对弹孔识别的影响,而且计算量更小。
弹孔差影法首先需要提取出靶图上的所有弹孔,然后与上一次射击结果做差,以找出新增加的弹孔,作为本次射击结果。分析实际获得的射击图像,发现弹孔的灰度值跟靶图其他部分灰度值差异较大,所以,本文提出了一种基于灰度统计的弹孔识别方法。首先统计不含弹孔的原始靶图RGB 3个通道上的彩色数据信息。接着根据直方图信息对包含弹孔的靶图按像素进行标记,对RGB通道信息与统计结果相差较大的点标记为白色,其余的标记为黑色,图5(a)是经过标记得到的疑似弹孔区域。这些疑似弹孔区域包括部分非弹孔干扰区域,干扰区域与弹孔区域相比,最大的特点是包含的像素数目很少,可以利用数学形态学方法来处理。本文通过一次开运算来去掉这些干扰区域,识别结果如图5(b)所示。对于连续射击产生的新弹孔,与前一次射击结果做差则得到新弹孔位置。

图5 弹孔识别
至此,弹孔坐标、靶心坐标和环线半径已经完全识别出,可以开始计算环值。根据射击比赛规则,只有位于胸型靶有效区域的弹孔才计算成绩,所以在计算成绩前,先提取靶图有效区域,检测射击结果是否有效。如果成绩无效,直接输出成绩0,不再进行后续计算。靶图有效区域只需要对图4(c)的结果填充靶心即可。
对于有效成绩,设弹孔中心位置与靶心的距离为L,ri为第i环的环值半径,环值计算分为2步:
(1)计算环值的整数部分A,依次判断L是否小于等于ri(i=10,9,8,7,6),第1个不小于距离值的半径ra即为A。
3 实验结果与分析
将本文提出的自动报靶方法运用到实际的自动报靶系统,图像采集设备为高清摄像机,安装在距离射击靶6m处,图6是在不同光照条件下进行连续射击的判靶结果。射击分为2组,第1组为室内正常光照,第2组为室内弱光照,每组连续射击6次。每组第1张图片为输入分类器的图片,后面6张为系统输出的射击成绩判定结果。

图6 2组室内射击的判靶结果
从室内实验结果可以看到,该方法能识别不同光照条件下的靶面并正确计算射击成绩。
对900次野外实弹射击成绩进行统计,统计结果如表1所示,射击场地为野外空旷场所,射击距离100m,射击靶为标准军用胸型靶,射击环境分别为晴天、阴天的不同时刻。从表中结果可以看到,报靶精度能达到98.5%以上(报靶精度的计算以人工报靶成绩为标准)。

表1 野外实弹射击统计结果
4 结束语
本文提出一种基于视频图像分析的自动报靶方法,使用Boosted Cascade算法训练分类器识别靶面,利用图像处理方法识别靶心与弹孔。实验结果表明,该方法能正确识别不同环境下的靶面图像,并正确计算射击成绩,对军警靶场不同天气情况以及不同时刻的实弹射击成绩统计结果显示,其报靶精度能达到98.5%以上。将机器学习算法应用于靶面识别可发挥学习算法的优势,提高自动报靶系统对环境的适应能力,但由于分类器的学习训练比较复杂,因此提高分类器的训练效率是下一步的研究方向。
[1]Ye Cuiliu,Mi Hong.The Technology of Image Processing Used in Automatic Target-scoring System[C]//Proceedings of the 4th International Joint Conference on Computational Sciences and Optimization.Washington D.C.,USA:IEEE Press,2011:349-352.
[2]谢小亮.基于图像处理技术的自动报靶系统[D].重庆:重庆大学,2012.
[3]张丽霞.基于图像技术的智能报靶系统设计[D].南京:南京理工大学,2012.
[4]陆祥翠.基于图像处理的靶图识别技术研究[J].计算机光盘软件与应用,2014,(1):309-310.
[5]Arce G R,McLoughlin M.Theoretical Analysis of the Max/Median Filter[J].IEEE Transactions on Acoustics,Speech and Signal Processing,1987,35(1):60-69.
[6]Zhang Weize,Tong Ruofeng.Boosted Cascade of Scattered Rectangle Features for Object Detection[J].Science in China Series F:Information Sciences,2009,52(2):236-243.
[7]杜 宇.基于Boosted Cascade算法的人脸检测和跟踪系统[J].电子科技,2006,(7):67-70.
[8]Viola P,Jones M J.Robust Real-time Face Detection[J].International Journal of Computer Vision,2004,57(2):137-154.
[9]Viola P,Jones M.Rapid Object Detection Using a Boosted Cascade of Simple Features[C]//Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Washington D.C.,USA:IEEE Press,2001:511-518.
[10]Lienhart R,Maydt J.An Extended Set of Haar-like Features for Rapid Object Detection[C]//Proceedings of IEEE International Conference on Image Processing.Washington D.C.,USA:IEEE Press,2002:900-903.
[11]Aryan P R.Vision Based Automatic Target Scoring System for Mobile Shooting Range[C]//Proceedings of ICACSIS’12.Washington D.C.,USA:IEEE Press,2012:325-329.
[12]Xu Xiangyang,Xu Shengzhou,Jin Lianghai,et al.Characteristic Analysis of Otsu Threshold and Its Applications[J].Pattern Recognition Letters,2011,32(7):956-961.
[13]Fan Xinnan,Cheng Qianqian.Design of Automatic Targetscoring System of Shooting Games Based on Computer Vision[C]//Proceedings of IEEE International Conference on Automation and Logistics.Washington D.C.,USA:IEEE Press,2009:825-830.
[14]焦圣喜,肖德军,阙一凡.霍夫变换算法在圆心视觉定位中的应用研究[J].科学技术与工程,2013,13(14):275-279.