Yaskawa 4轴机器人晃动问题处理
2015-01-01张新沂缪红林芮银龙
张新沂 缪红林 芮银龙
(北京京东方光电科技有限公司 北京)
北京京东方光电科技有限公司(简称BOE)是国内最大的TFT液晶面板生产厂商,其设备自动化程度高,每台设备对应1台4轴机器人负责玻璃基板搬运工作。随着生产设备的不断更新换代,Array工艺段清洗、剥离、湿刻设备全部由原来的U形设计变为上下两层设计,机器人U轴(升降轴)高度由2.5 m变为5 m。机器人从PORT口取到玻璃后放入主设备玻璃入口,由于速度过高制动时产生高位晃动,产生安全隐患,并且长时间晃动机器人伺服马达、减速机、齿轮、齿条出现不同程度磨损。目前Yaskawa厂商给出的解决办法为更换电机、减速机、导轨等相关机械机构,未从根本上解决高位晃动问题。
一、故障原因分析
产生晃动机器人为Yaskawa 4轴搬运机器人,质量1 t左右,U轴采用折叠设计,由伺服电机通过同步带带动中间与下部两个RV减速机完成升降动作;S轴(旋转轴)、X轴(走行轴)分别由1个伺服电机带动1个RV减速机完成旋转、走行动作;L轴(下手臂)、R轴(上手臂)分别由1个伺服电机通过同步带带动3个RV减速机完成玻璃取放动作。主设备由3个PORT口存放玻璃,Remote状态下机器人从PORT口取出玻璃基板运动至主设备最上端5 m位置,从设备下端约1.5 m位置将已完成工艺的玻璃取出后放回到PORT口原位置,运行过程中,X轴、R轴、U轴为联动,即机器人取到玻璃基板后到达设备入口处时3轴同时完成运动,最后R轴、L轴将玻璃放入主设备或PORT口CST中,运行轨迹如图1所示。
本设备所用的Yaskawa 4轴机器人采用折叠设计,U轴升降过程中机器人重心未在走行底座的中垂线位置,高位时重心高,力矩大,对导轨、滑块、减速机等磨损加重,如图2所示;该设备机器人导轨与底座直接放置在地板上,并未与地板等建筑主体钢梁固定,高位时无法有效制动导致制动时晃动。机器人从主设备取出玻璃基板送到PORT口时虽然重量大,但由于其重心低,X轴运行平稳,机器人在到达位置点后本体无晃动现象;当机器人3轴联动从PORT口取出玻璃放到主设备入口处制动时,机器人晃动。
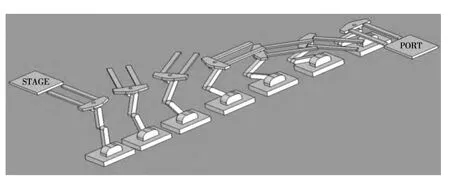
图1 机器人运行轨迹
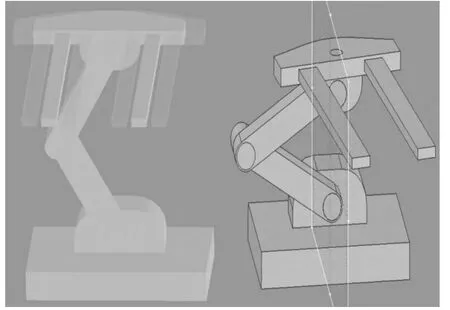
图2 机器人晃动原因分析
长时间晃动对机器人机械部件产生不同程度磨损,齿轮齿条磨损严重且间隙增大,导轨表面出现铁屑,滑块与导轨间隙增大,滑块滚珠磨损,减速机齿轮磨损、间隙增大。
二、问题解决方法
(1)更换齿轮、齿条、导轨、滑块,加固地板相连,将机器人底座连接到地板钢梁,依靠主设备及钢梁的牵拉力减少机器人晃动,该种方法对机器人齿轮、导轨、滑块、减速机等的损坏大,更换新的机械部件后3年左右需要重新更换,无法从根本上解决机器人晃动问题。
(2)修改程序,在机器人从PORT口取到玻璃基板后到主设备玻璃入口增加一个轨迹运行点,即从PORT口到主设备入口分为两步完成,保证X轴移动到主设备入口时重心足够低,X轴制动过程中不出现机器人本体晃动,从该位置U轴上升到主设备入口位置,运动轨迹修改如下。
机器人从PORT口取玻璃后,X轴、S轴、U轴联动运行,X轴、S轴按程序移动到玻璃入口位置,U轴保持从PORT口取玻璃时高度不变。
由于X轴、S轴已经到达主设备玻璃基板入口位置,这时只需要U轴单独升高至主设备玻璃入口位置,最后R轴或L轴放玻璃基板到主设备,完成从PORT口到主设备入口轨迹运动。通过修改程序后机器人运行轨迹如3所示。
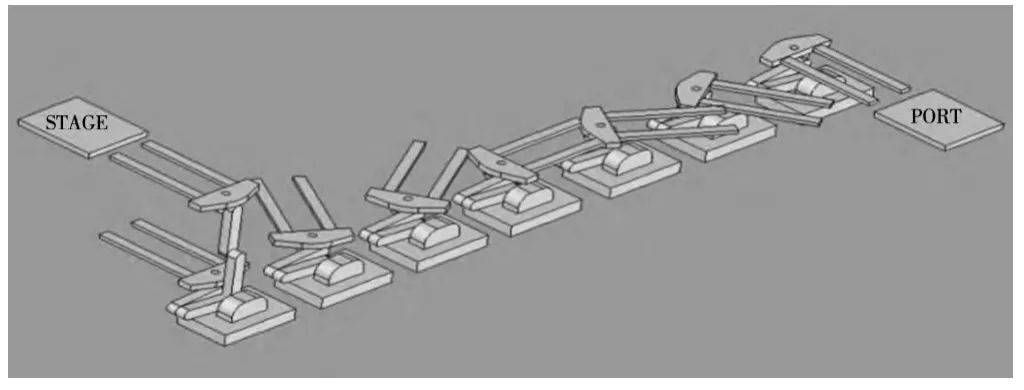
图3 修改后运行轨迹
InformII语言,是安川公司XRC系列机器人使用的编程语言,由指令跟附加项组成,该语言包括I/O指令、控制指令、移动指令、操作说明、移位指令、弧焊点焊指令等组成。分析Remote模式下机器人运行程序,根据机器人、Indexer、主设备三者通信协议修改程序,增加轨迹点,部分修改后程序与源程序比较如图4所示,图4中右侧38,39以及43~52部分为增加的程序。
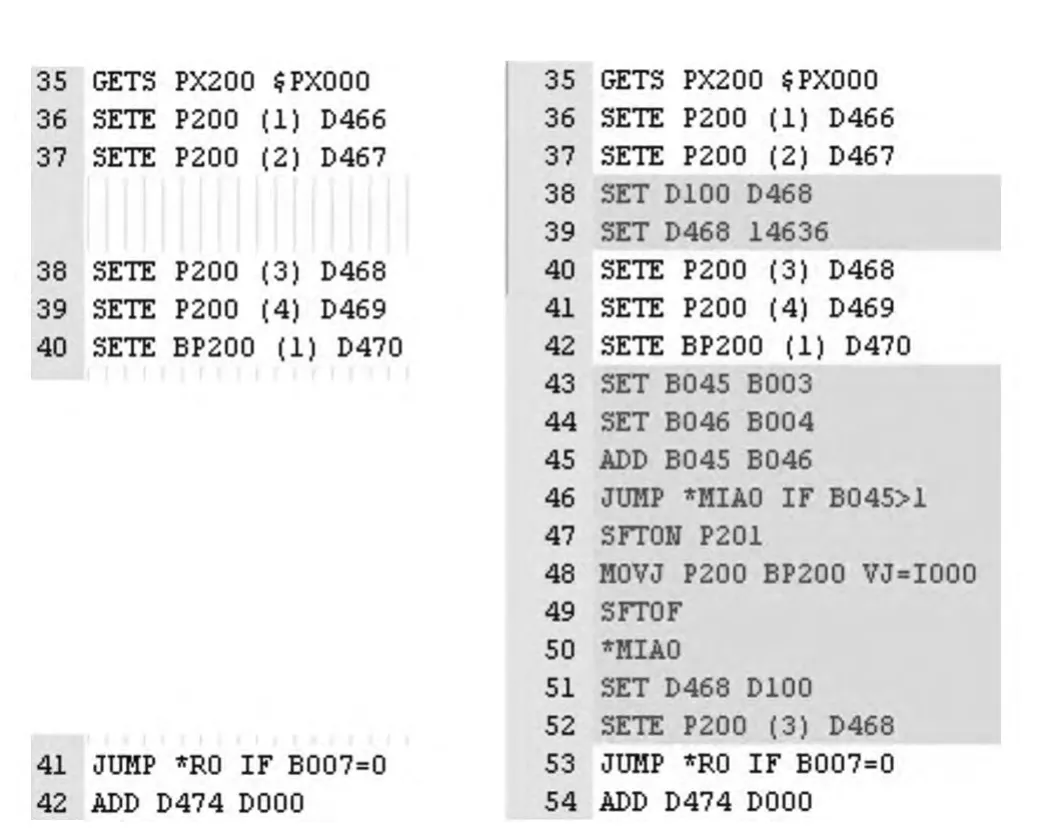
图4 程序对比
实际运用过程中,由于增加运行轨迹点,机器人的Tac Time将增加,该设备稼动率高,设备吞吐玻璃基板速度快,通过程序修改每一运动轨迹速度办法进一步优化机器人运动速度不影响主设备Tac Time,实现该设备满速运行。
三、结语
由于LCD工艺的不断进步,对设备的工艺要求也越来越高,设备运行效率也越来越高,湿刻、剥离、清洗3种设备变为更节省空间的上下两层设计,远距离及更高玻璃基板搬运对机器人设计、机械部件及安装等硬件提出了更高的要求。改造的设备机器人U轴运行高度达到5 m,底座、导轨、滑块、X轴减速机运行3年后相关部件磨损,机器人高位晃动,导致该设备长时间减速运行。程序改造完成后,由于机器人在X轴运行时重心在低位,晃动消失,该设备实现满速运行,提高了产能及效率,经过3年运行,机器人运行良好。通过该机器人分析可知,设备检讨时需加强对机器人品牌选型并编排合理运行轨迹,即满足设备Tac Time需要,又要最大程度减小对其机械部件磨损。
