基于模糊PID控制的六自由度液压系统
2015-01-01马训鸣
张 婧,马训鸣
(西安工程大学 机电工程学院,陕西 西安710048)
0 引 言
六自由度并联平台是由6个液压缸共同配合完成指定的姿位变换,各个缸之间的输出会相互影响,因此平台具有高度非线性,强耦合的特点.PID控制器以其结构简单,对模型误差具有鲁棒性及易于操作等优点,被广泛应用于冶金、化工、电力、轻工和机械等工业过程控制中[1].受负载交联耦合的影响,传统的PID控制难以满足系统快速、精准的响应要求,相对于常规控制系统,模糊控制系统的鲁棒性更强,外部干扰以及参数变化对控制效果的影响被减弱,特别是对于非线性、时变以及纯滞后系统,模糊控制比常规控制具有更好的控制效果[2].为了提高控制效果,文献[3]将自适应控制和滑膜控制结合,提高了轨迹跟踪精度;文献[4]采用运动学的控制方法以及MADRC控制系统控制各项指标达到期望;文献[5]提出了将免疫算法引入增量式PID控制器,增强了系统的稳定性和鲁棒性;文献[6]改进了BP神经网络方法,减小了控制系统的延迟.PID控制器具有较差的动态响应效果,模糊控制器具有较好的快速性和较强的适应性.将模糊控制与PID控制结合,能够实现对电液伺服控制器这一类非线性系统的良好控制[7].本文根据实验室六自由度平台实际参数确定了电液伺服控制系统的传递函数,设计了相应的模糊控制器,通过Matlab/AMEsim的联合仿真,探讨了模糊PID控制系统的优势,达到了提高平台响应速度及精度的目的.
1 模糊PID控制算法
传统PID控制传递函数为

式中,Kp为比例系数;Ki为积分时间常数;Kd为微分时间常数.
在PID控制器中,比例环节反映控制系统的偏差信号;积分环节主要用于消除静差,提高系统的无差度[9];微分环节反映偏差信号的变化趋势,并在偏差信号过大前引入一个修正,从而加快系统的动作速度,减少调节时间.
模糊控制是以模糊集合论、迷糊语言变量及模糊逻辑推理为基础的一种计算机控制[10].模糊控制系统由模糊控制器和对象组成,如图1所示.
从理论上讲,模糊控制器的维数越高,控制越精细,但当维数过高时,模糊控制规则变得过于复杂,控制算法的实现相当困难[11].本文采用二维模糊控制器,以误差e及误差变量ec作为输入变量.将采集的系统误差e及误差变化率ec,通过模糊控制器推导出相应的输出量,对PID控制中的3个参数进行实时修改,达到在不同干扰下控制系统的目的.因此,文中的控制系统整体与模糊控制框架相似,但在模糊控制器后串联一个PID控制器,模糊控制器的3个输出量首先作用在PID控制器上进行参数调整,再由调整参数后的PID控制对象.
模糊化:首先确定2个输入及3个输出的论域.本文中,2个输入变量分别为e及ec;3个输出变量为Kp、Ki及Kd,论域均设为(-3,3).模糊控制的精细化程度由模糊语言的个数决定.本文采用:NB(负大)、NM(负中)、NS(负小)、ZE(零)、PS(正小)、PM(正中)、PB(正大)作为语言变量.均采用三角形模糊集合的隶属度函数.
控制规则:模糊PID控制器就是不同时刻的输入量的组合与PID控制器的参数之间的控制关系[12].根据PID控制规则,当系统误差e较大时,选用较大Kp加快响应速度,减小Kd防止微分饱和,去掉积分作用防止系统超调;系统误差e及误差变化率中大时,选用较小的Kp减小超调,适中的Ki及Kd保证响应速度;系统误差e较小时,选用较大的Kp和Ki,当ec较大时减小Kd,反之增大Kd.系统偏差变化率ec的值,体现了系统偏差变化的速率.因此当ec值大时,适当减小Kp,增大Ki.
基于以上原则,以e取NB为例,采用IF-THEN语言来编写模糊PID控制规则如下:

图1 模糊控制系统组成Fig.1 The fuzzy control system
If(e is NB)and(ec is NB)then(kp is PB)(ki is NB)(kd is PS)
If(e is NB)and(ec is NM)then(kp is PB)(ki is NB)(kd is NS)
If(e is NB)and(ec is NS)then(kp is PM)(ki is NM)(kd is NB)
If(e is NB)and(ec is ZE)then(kp is PM)(ki is NM)(kd is NB)
If(e is NB)and(ec is PS)then(kp is PS)(ki is NS)(kd is NB)
If(e is NB)and(ec is PM)then(kp is ZE)(ki is ZE)(kd is NM)
If(e is NB)and(ec is PB)then(kp is ZE)(ki is ZE)(kd is PS)
其他规则类似,根据以上规则设置Matlab中的Fuzzy模块可得到如图2所示的Surface图.
2 液压伺服系统传递函数
六自由度平台由六路并行的阀控液压缸共同控制,每一路液压伺服系统都可被看作一路单独的控制对象,故而只需对其中一路液压伺服系统进行建模.被控对象主要由功率放大器、伺服比例阀及液压缸组成[13].

图2 Fuzzy控制规则Surface图Fig.2 Surface of fuzzy control rules
2.1 伺服比例阀
在多数电液伺服系统中,动力元件的动态响应往往低于伺服阀的动态响应[14].故电液伺服比例阀的二阶近似传递函数可化简为

其中,ζsv为阀的阻尼比;Ksv为阀的流量增益;ωsv为阀的固有频率.

本文采用ATOS公司生产的DLHZO-TE-040-L71伺服比例阀,根据频率响应特性曲线图取幅值比为-3dB所对应的频率为140Hz,相位滞后90°所对应的频率为130Hz,取ωsv=135Hz.
根据式(3),当φ(ω)=30°时:
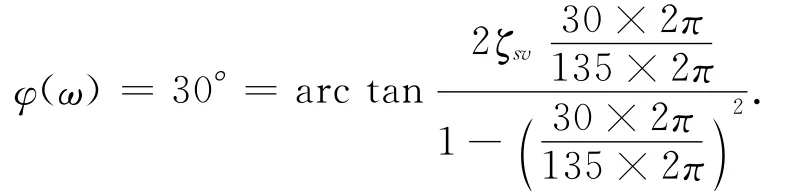
即当φ(ω)=30°时,ζsv=1.23;同理当φ(ω)=40°时,ζsv=1.29;φ(ω)=45°时,ζsv=1.33.故取平均值ζsv=1.28.
根据压差/流量曲线可查得,当阀降压Δp=30bar时,额定流量=27L/min.电流I取0.01A,则Δp=30bar时,额定流量40L/min的阀的流量增益为

故伺服阀的传递函数为

2.2 液压缸与负载
本文选用的是一种非对称阀控液压缸,其传递函数为

2.3 功率放大器
功率放大器等环节的响应速度远大于压缸的响应速度,因此功率放大器、位移传感器等环节都可被看为比例环节:功率传感器增益取Kp=0.007A/V;位移传感器增益取Ks=100V/m.系统开环方框图如图3所示.

图3 系统开环方框图Fig.3 Open loop system block diagram
在Matlab中绘制系统的博德图如图4所示.由图4可知,增益裕量为K=14.8dB,相位裕量为Ye=23.7°,故此系统是稳定的.

图4 系统博德图Fig.4 Byrd system diagram
3 仿真平台的搭建与运行
本文使用美国MathWorks公司Matlab/Simulink软件与LMS公司的AEMsim软件对系统进行联合仿真,对比模糊PID控制与常规PID控制的响应结果.控制系统的仿真平台的搭建与各模块连接如图5所示.其中(a)为模糊PID控制系统;(b)为常规PID控制系统;(c)为PID模块;(d)为s-function模块.运行仿真后s-function模块将调用AMEsim中搭建的电液伺服系统物理模型,其模型如图6所示.
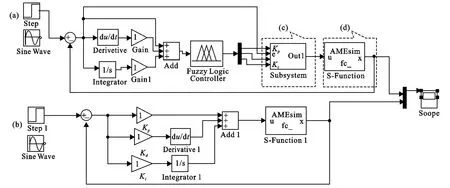
图5 仿真平台设计图Fig.5 The simulation platform
在所搭建的仿真平台中运行仿真程序,并进行PID参数整定,示波器收集仿真结果如图7~8所示.从图7响应曲线可以看出,模糊PID控制下的系统响应仅需4.5s,较普通PID控制提高约1.5s,PID控制超调较大,响应较慢,调整时间长.模糊PID控制响应达到稳定所需时间远小于常规PID控制所需时间.从图8可以看出,模糊PID控制的精度在普通PID控制的基础上提高了0.17%,达到更高的控制要求.
4 结束语
模糊PID控制响应达到稳定所需时间远小于常规PID控制所需时间.经过模糊控制优化后的PID控制减小了系统超调.模糊PID控制器结合了PID控制稳定性好与模糊控制器动态特性与鲁棒性佳的特点,故将模糊PID控制应用在六自由度平台的液压系统中,达到了提高平台的响应速度和控制精度的目的.
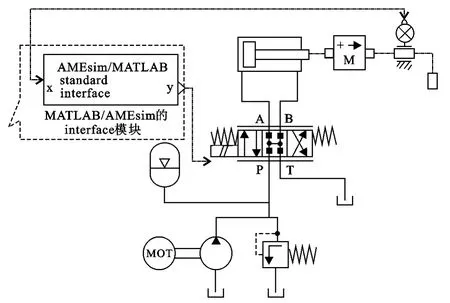
图6 AMEsim中的电液伺服系统模型Fig.6 Electro-hydraulic servo system in AMEsim

图7 系统阶跃响应图Fig.7 The system step response
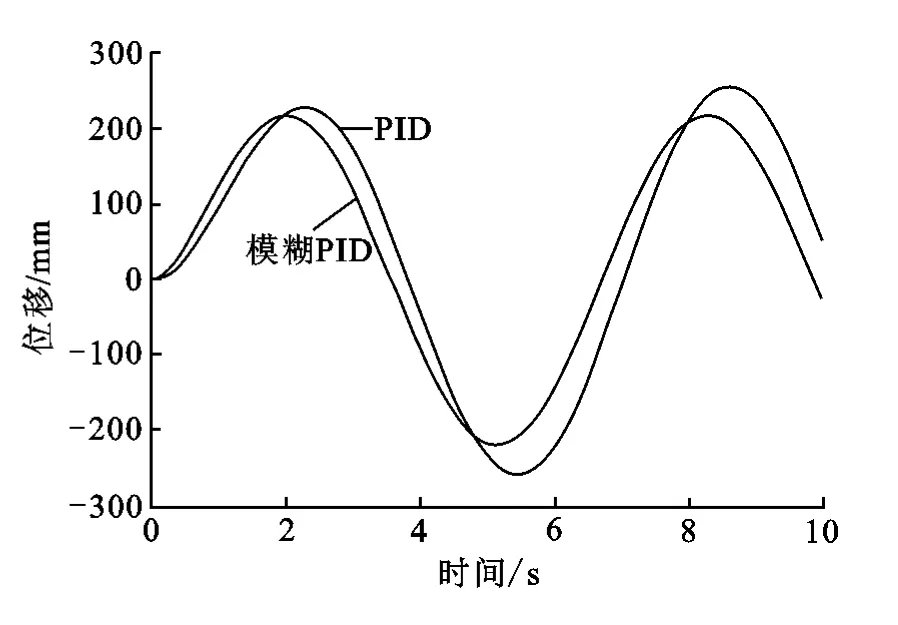
图8 液压杆位移仿真图 Fig.8 The hydraulic lever displacement simulation diagram
[1] 李斌,原思聪,张会杰,等.PID控制器在水平连铸设备电液速度伺服系统中的应用研究[J].机床与液压.2009,37(7):133-136.LI Bin,YUAN Sicong,ZHANG Huijie et al.The application of PID controller in the electro-hydraulic speed servo control system of continuous casting equipment[J].Machine Tool &Hydraulics,2009,37(7):133-136.
[2] 李国志,任小洪,任兵.数控机床伺服系统的模糊自整定PID仿真研究[J].组合机床与自动化加工技术,2012(6):66-70.LI Guozhi,REN Xiaohong,REN Bing.Simulation research on fuzzy self-turning PID control in NC machine tool servo system[J].Modular Machine Tool &Automatic Manufacturing Technique,2012(6):66-70.
[3] PI Y,WANG X.Trajectory tracking control of a 6-DOF hydraulic parallel robot manipulator with uncertain load disturbances[J].Control Eng Pract,2011,19(2):185-193.
[4] BECHLIOULIS C,DOULGERI Z,ROVITHAKIS G.Guaranteeing prescribed performance and contact maintenance via an approximation free robot force/position controller[J].Automatica,2012,48(2):360-365.
[5] 施昕昕,常思勤.一种新型6自由度运动平台的控制研究[J].机械工程学报,2014,50(3):56-63.SHI Xinxin,CHANG Siqin.Research on control of a novel 6-DOF motion platform[J].Journal of Mechanical Engineering,2014,50(3):56-63.
[6] 张乔斌,荣伯钧,潘炜.改进的BP神经网络方法在液压控制系统中的应用研究[J].液压与气动,2011(7):97-100.ZHANG Qiaobin,RONG Bojun,PAN Wei.Research on modified BP neural network for hydraulic control system[J].Chinese Hydraulics &Pneumatics,2011(7):97-100.
[7] 唐心龙,董桂军.电流变液半主动悬置隔振特性仿真研究[J].噪声与振动控制,2010(4):25-28.TANG Xinlong,DONG Guijun.Study on isolation characteristics of an electroy-theological fluids semi-active engine mount[J].Noise and Vibration Control,2010(4):25-28.
[8] 钟旭佳,高晓丁,严楠.电液比例压力控制系统的PID参数优化[J].西安工业大学学报,2015,35(2):106-111.ZHONG Xujia,GAO Xiaoding,YAN Nan,PID pararneter optimization of electro-hydraulic proportional pressure control[J].Journal of Xi′an Technological University,2015,35(2):106-111.
[9] 田凡.电液伺服系统模糊PID控制仿真与实验研究[D].太原:太原理工大学,2010:25-41.TIAN Fan.Fuzzy PID control simulation and test study on electro-hydraulic servo system[D].Taiyuan:Taiyuan University of Technology,2010:25-41.
[10] 胡包钢,应浩.模糊PID控制技术研究发展回顾及其面临的若干重点问题[J].自动化学报,2001,27(4):567-583.HU Baogang,YING Hao.Review of fuzzy PID amtrol techniques and some important issues[J].Acta Automatica Sinica,2001,27(4):567-583.
[11] 焦嵩鸣,赵潇明,侯晓宁.自整定PID控制算法在优化控制站中的应用[J].计算机仿真,2014,31(1):412-415.JIAO Songming,ZHAO Xiaoming,HOU Xiaoning.Self-tuning control algorithm in application of optimal control station[J].Computer Simulation,2014,31(1):412-415.
[12] 张二岩.伺服阀控缸位置控制系统的模糊控制和模糊-PI复合控制比较[J].液压气动与密封,2012(1):25-27.ZHANG Eryan.The control comparison of fuzzy control system of servo and fuzzy-PI control in position valve controlling cylinder[J].Hydraulics Pneumatics &Seals,2012(1):25-27.
[13] 吴楚珊.基于模糊神经网络的染色机温度控制[J].西安工程大学学报2012,26(5):638-642.WU Chushan.Dyeing machine of temperature control based on fuzzy neural network[J].Journal of Xi′an Polytechnic University,2012,26(5):638-642.
[14] 王延年,郭卫松,陈苗苗.基于DSP的高精度智能电液伺服控制器的设计[J].西安工程大学学报,2013,27(2):198-202.WANG Yannian,GUO Weisong,CHEN Miaomiao.The design of high precision intelligent electro-hydraulic servo controller based on DSP[J].Journal of Xi′an Polytechnic University,2013,27(2):198-202.