一种新型柔性触觉阵列传感器标定平台的设计
2014-12-31李浩洋张玉刚张津源李新潮马金凤
黄 英, 李浩洋, 张玉刚, 张津源, 李新潮, 马金凤
(合肥工业大学 电子科学与应用物理学院,安徽 合肥 230009)
0 引 言
机器人技术是当今全球高新技术发展的重要标志之一。机器人系统需要各种各样的感知传感器来获取工作环境的全局信息,包括视觉传感器、接近觉传感器、触觉传感器等。触觉作为机器人获取环境信息的一种仅次于视觉的重要知觉形式,是机器人实现与环境直接作用的必要媒介。随着机器人开始进入人类生活,人们要求其接触部位具有与人类皮肤一样的感知能力和柔韧性[1-2]。柔性触觉阵列传感器作为一种测量自身敏感面与外界物体相互作用参数的装置,包含多个触觉传感单元,每个传感单元都能够独立获取外界信息,可以测量接触外界物体时所受压力和压力分布,有助于机器人对接触对象的几何形状和硬度的识别,能够满足机器人对触觉传感器柔韧性和大面积感知的要求[3-5]。
柔性触觉传感器主要利用导电橡胶材料的特性制作,而实际的橡胶材料本身具有相当复杂的非线性物理性能,与假设的部分理想性质有一定差距,因此还需要对柔性触觉传感器进行实际的标定。通过标定实验发现理论与实际的误差,并分析原因进而对传感器结构及模型进行修正完善。但是,当前压力加卸载平台多为工业应用,如机械式、电子式、液压式,其设备价格高,压力量程较大,操作不便;而一般实验室所用的压力标定平台大多通过手动控制实现压力大小的调节,不能实现自动、实时、准确、连续且加压形状可变的压力控制[6-9]。
本文设计制作了一种用于柔性触觉阵列传感器的专用标定平台,可解决对该类传感器精度等性能的评定问题。该平台可利用不同形状的加压触头,在传感器阵列各单元上实现不同压力分布的标定,并在计算机上实时输出标定数据和特性曲线,为新型柔性触觉阵列传感器的标定提供切实可行的方案。
1 系统硬件组成
标定平台的设计包括控制端、CPU、显示、电源、电机和测力传感器6个部分。系统总体设计框图如图1所示。
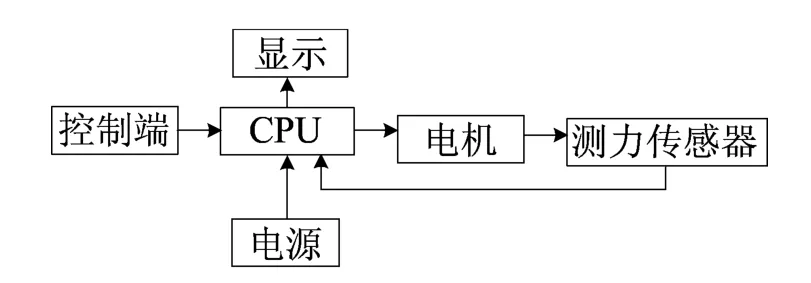
图1 系统总体设计框图
控制端设定加载压力大小,测力传感器实时输出压力信号。CPU对两者大小进行比较,控制电机行为,改变施加压力大小,实现设定力的加载,并通过显示模块实时显示。同时,将数据传送给上位机,实现图形化的数据显示。
1.1 压力加载模块
压力加载模块包括直线步进电机、加压触头、十字滑台和支架4个部分。
本平台选取的直线步进电机是由鼎拓达机电有限公司生产的DT42N2035AA4-100型直线步进电机,其步进角为1.8°,步长0.003 048mm,加压精度达到实验室中对柔性触觉阵列传感器标定的要求。该直线步进电机由DT4015驱动器驱动,并通过微处理器的PB0和PB1引脚控制,如图2所示。
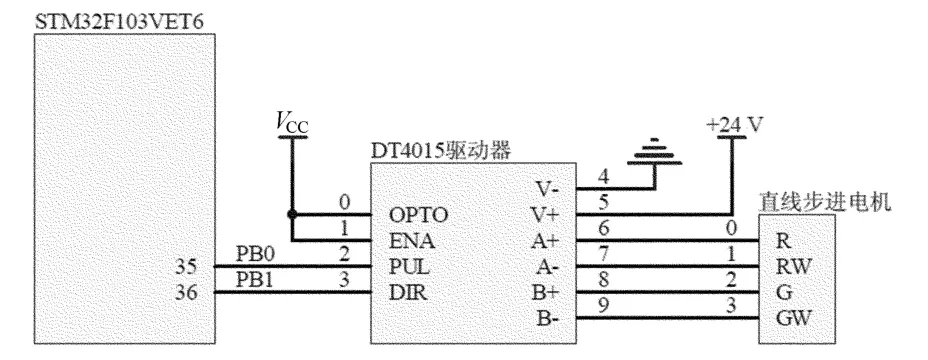
图2 压力加载模块接线图
为了满足对阵列传感器进行标定的要求,标定平台附带不同形状的加压触头,对待测物进行压力加载;同时,通过控制十字滑台,载物台可水平移动,从而精确地对不同传感器单元进行标定。
1.2 数据采集与处理模块
数据采集与处理模块由测力传感器和微处理器组成,其中微处理器是整个数据处理的核心。在选择微处理器时,需要兼顾串行通信接口、输入输出接口数量、功耗等方面,特别是从A/D转换精度与大量数据处理速度等方面考虑,需要一款足够强大的微处理器来满足以上要求。本平台选用了STM32F103VET6微处理器。
STM32[10-12]微处理器比较 突出的一个 功 能是ADC,有18个多路复用通道,允许测量16个外部和2个内部源信号。不同通道的A/D转换可以在单一或连续、扫描或间断模式下进行。12位精度,最快转换速度为1μs,具备2个以上独立的ADC控制器,可以同时对多个模拟量进行快速采集。ADC采集数据时一般需要多次采集,单次ADC无意义,这也就意味着数据传输量大。STM32有一个与CPU并行运行的模块:DMA(Direct Memory Access),是一个独立于 Cortex-M3内核的模块。其主要功能是起到通信“桥梁”的作用,可以将所有外设映射的寄存器“连接”起来,这样就可以高速访问各寄存器,使其传输不受CPU的支配。
测力传感器采用合肥科瑞公司的NR-HB1传感器,其输出电压为0~5V,对应压力值为0~50N,综合精度0.05%F.S。在平台制作过程中,加入滤波电路可以显著降低测力传感器输出信号的波动,使压力信号更稳定。
测力传感器输出的压力信号经微处理器A/D转换后,通过串口由DMA方式显示在上位机界面。微处理器将采集到的实时压力信号与目标值比较后,控制压力加载模块,实现力的加载。
1.3 控制与显示模块
平台采用4×4矩阵键盘,实现数据的录入和标定控制功能。除了基本功能按键以外,定义了“去初重”功能键,以消除柔性触觉阵列传感器自重的影响;定义“快速上行”和“快速下行”功能键,使加压触头可以快速上下行,方便了标定工作;设置 “暂停”功能键,以应对标定过程中的突发情况。
标定系统的显示部分由2个四位八段LED数码管组成,分别显示当前压力值和设定压力值。
2 系统软件设计
2.1 微处理器程序设计
2.1.1 总体设计
软件设计流程中,首先对A/D转换、中断、定时器、串口和DMA等进行初始化,然后程序开始扫描键盘,读取控制信息,并根据信息控制电机行为,同时程序读取测力传感器的压力信号,显示压力数值,最后,将当前压力值与设定值进行比较:若两者不相等,则根据两者大小关系,控制电机的前进或后退,并返回到电机控制环节,形成反馈调节;如果两者相等,则暂停电机,程序结束。流程如图3所示。
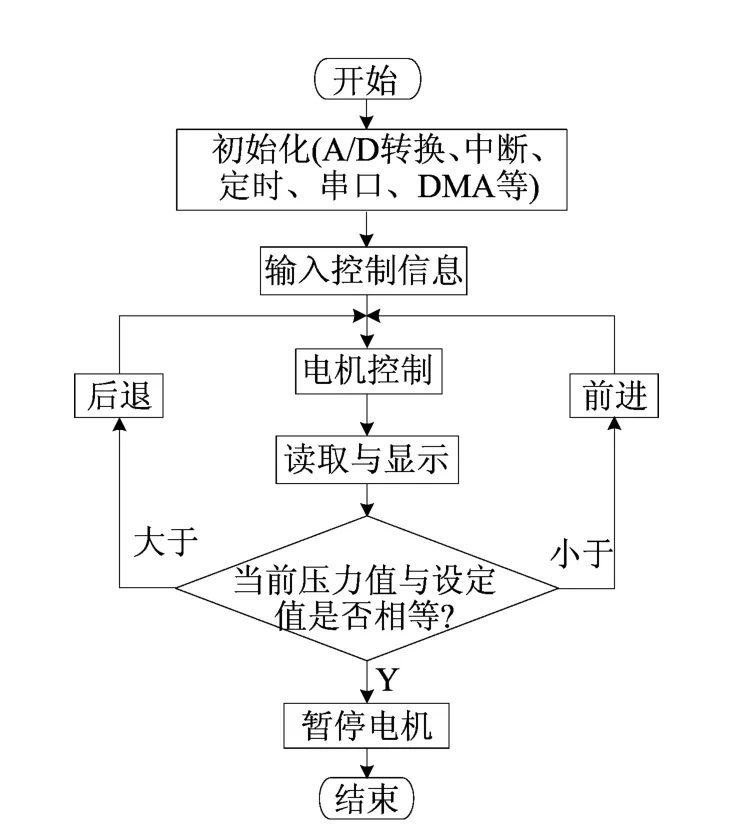
图3 程序控制流程图
2.1.2 初始化
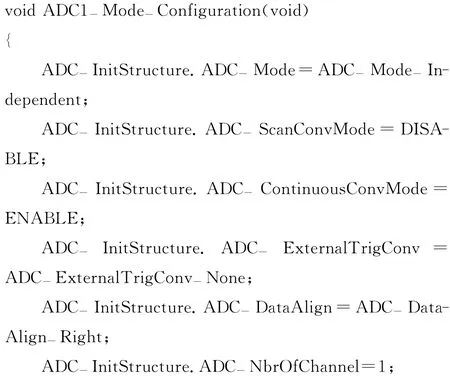
首先完成对STM32的初始化配置,将PA0配置为ADC的第0个采样通道,PA9和PA10引脚为串口的输入输出,PB0和PB1配置为电机控制引脚。ADC初始化程序如下:
2.1.3 电机驱动
在程序的具体实现过程中,为了生成频率合适、波形标准的方波信号,避免微处理器因执行其他函数而影响电机驱动函数的执行,电机驱动函数通过定时器中断的方式运行,以达到迅速响应的目的。
2.1.4 数据采集与处理
在程序中,为了避免中断过于频繁、与驱动电机的定时器函数相互干扰,A/D转换程序不采用定时器而采用查询方式工作。
实际应用中,受外界电磁、噪声等干扰,A/D转化模块测出错误的数据总会出现。从某种意义上讲,单次A/D所得数据可靠性不大。为了减弱干扰,对A/D采样值通常要进行滤波处理。本程序采用中位数均值滤波方法进行软件滤波。通常,平均次数越多,数值越可靠,但同时平台工作效率会降低。对本平台,综合考虑数值可靠度与工作效率,在采样6次后,取数值位于中间的4次采样数据的均值,是比较合适的工作点。
2.1.5 数码显示
由于ADC转换后的数据是二进制数据,而数码管所要显示的数据是十进制数据,因此需要进行二、十进制数据转换,ADC输出的最大转换值为0X0FFF(50.00N),实际要显示的压力应为(adc-value/4 096×50)N。将四位数码管小数点设置在第2位,使其所能显示的范围为00.00~50.00。将十进制数压力值按位模10处理得到四位数码管需要显示的数据,并建立字型码数组。2个四位数码管的八段段选分别由PE0~PE15控制,要显示0~9其中一个数字只要让端口输出它对应的字型码。为节省占用资源、减小耗电量,采用动态显示,也就是利用人眼的暂留视觉,循环轮流点亮各数码管的方法。2个四位数码管的位选信号由PD0~PD7控制,通过简单的循环及延时程序即可实现。为了避免由于延时和“视觉暂留”等因素造成数码管亮度不一的现象,在程序中应进行“消隐”处理。
2.2 应用程序设计
除了在本平台上实现的功能之外,还采用Visual Basic语言编写了应用程序[13],实现了通过PC机对平台的控制,具有界面友好,控制简便的特点。标定过程中,应用程序接收微处理器通过串行接口传来的数字信号,并把它们成对存储起来,还可利用软件提供的制图功能,生成相应的图像,如图4所示,从而极大地方便了实验室对柔性触觉阵列传感器的标定工作。
此外,利用计算机的计算处理能力,可以继续开发其他功能的应用程序,进一步简化该标定平台参与的各项实验中的步骤,更方便地得到各种计算量。

图4 软件界面图形
3 平台标定实验
(1)平台检定。本标定平台的测力传感器与微处理器的A/D转换模块构成串联系统,根据误差理论[14],系统总误差为2部分误差之和,即δ=δ1+δ2。当系统处于正常工作状态时,δ1=0.05%,δ2=0.03%,故系统总误差δ=0.08%,理论上满足预期设计要求。
使用F1级标准砝码[15]对该平台进行检定,检定结果见表1所列。检定结果表明,标定平台的精确度满足设计要求。
(2)平台应用实例。使用该标定平台对待测柔性触觉阵列传感器进行标定。在图5所示的标定实验中,当设定压力值为35.00N时,标定平台能够准确、实时地对待测柔性触觉阵列传感器加载35.00N压力,并在PC机应用程序界面上显示出施加压力与时间的关系曲线。经测试,该平台可以精确、快捷、方便地对柔性触觉阵列传感器进行标定。
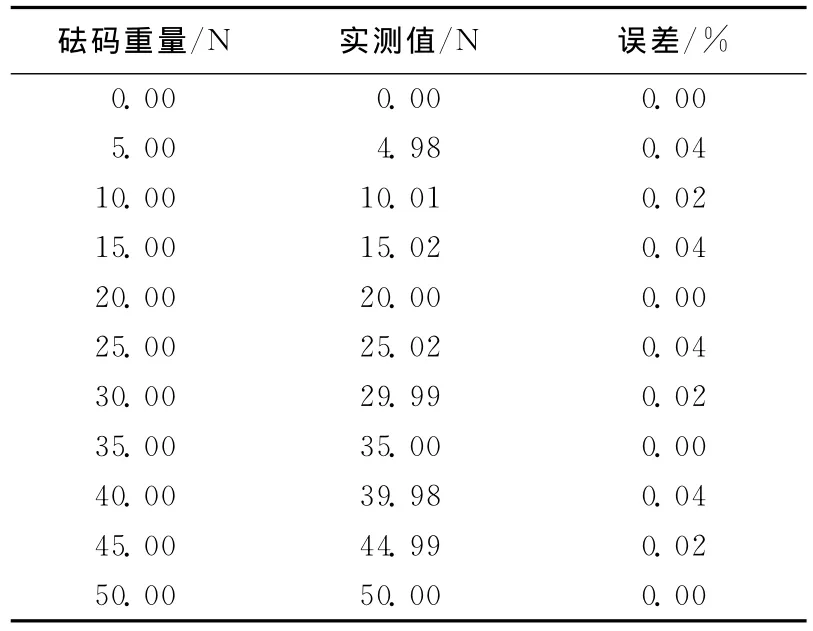
表1 实验数据表

图5 柔性触觉阵列传感器标定平台应用
4 结束语
本文对新型柔性触觉阵列传感器标定平台的设计和制作着眼于小型化、自动化、灵活性和高精度。该平台具有较高的测量精度和较强的适应性,满足了实验室中对柔性触觉阵列传感器标定量程和精度的要求,并且可通过更换不同形状的加压触头实现对柔性触觉阵列传感器上不同传感单元的标定,其标定曲线和数据可方便地显示。研究结果达到了预期的技术指标,目前该平台已经投入了实际的应用,并可在其他阵列式传感器研究和标定中进行推广。
[1] Girao P S,Ramos P M P,Postolache O,et al.Tactile sensors for robotic applications[J].Measurement,2013,46(3):1257-1271.
[2] Moisio S,Leon B,Korkealaakso P,et al.Model of tactilesensors using soft contacts and its application in robot grasping simulation [J].Robotics and Autonomous Sys-tems, 2013,61(1):1-12.
[3] 黄 英,张玉刚,仇怀利,等.柔性触觉传感器用导电橡胶的纳米SiO2改性技术[J].仪器仪表学报,2009,30(5):949-953.
[4] 张玉刚,黄 英,廉 超,等.碳纳米管/炭黑并用导电橡胶的制备与性能研究[J].合肥工业大学学报:自然科学版,2011,34(10):1452-1456.
[5] 刘平,黄英,廉超,等.炭黑填充导电橡胶的力敏传感器灵敏系数[J].复合材料学报,2012,29(1):16-20.
[6] 闫亚峰,姚明海,朱肖肖.嵌入式智能压力试验机测控系统设计[J].机电工程,2007,24(9):74-80.
[7] 吴房胜,欧阳名三,朱敏静.基于CS5532的高精度拉压力试验机设计[J].煤矿机械,2009,30(4):192-193.
[8] 唐中一.压力试验机精度检测系统的设计[J].科技资讯,2007(36):38-39.
[9] 王文广.万能材料试验机技术改造[J].科技风,2011(10):17.
[10] 常 霞,马建伟.基于STM32的列车空气动力学数据采集系统[J].仪表技术与传感器,2011(4):45-48.
[11] 陈政石,金来专,宋均正.基于STM32控制的双电动机交流调速系统[J].微特电机,2010,38(2):52-58.
[12] 刘慧英,范宝山.基于STM32的多步进电机控制系统研究[J].测控技术,2010,29(6):54-57.
[13] 林卓然.VB语言程序设计[M].第3版.北京:电子工业出版社,2012:1-240.
[14] 费业泰.误差理论与数据处理[M].第6版.北京:机械工业出版社,2010:57-67.
[15] GB/T 4167-2011,砝码[S].
