基于CPCI总线的SAR任务管理系统设计
2014-12-31段玲琳张增继
夏 勇, 段玲琳, 张增继, 尤 路
(中国电子科技集团公司 第三十八研究所,安徽 合肥 230088)
合成孔径雷达(Synthetic Aperture Radar,简称SAR)是一种具有高分辨率的成像雷达,其原理是通过飞行载体运动来形成雷达的虚拟天线,从而获得高方位分辨的雷达图像数据[1]。SAR任务管理系统是SAR的管理、控制中枢,具有SAR的管理控制和整机时序产生功能、雷达各分系统的工作状态和BIT检测功能以及系统对时功能等。
SAR任务管理系统目前一般采用基于显示控制界面的控制方式,控制方式较为单一。随着SAR技术的发展,对控制方式的多样化、工作模式的快速切换等方面提出了更高的要求。SAR任务管理系统在硬件上通常采用基于PC104总线或ISA总线的计算机控制模块。这些模块存在一些不足之处,例如总线数据传输速度较慢、系统扩展能力差,系统往往需要使用较多的硬件模块致使可靠性降低,同时软件也要相应地编制较多的软件模块。因此需要研制出一款基于高速数据传输总线、组成架构合理且符合SAR技术发展需要的新型SAR任务管理系统。本文设计的新型SAR任务管理系统采用CPCI总线设计。CPCI总线即紧凑型PCI总线,是以PCI电气规范为标准的高性能工业用总线,具有严格的标准和规范,保证了良好的兼容性,支持多种处理器和操作系统,符合CPCI规范的扩展卡可插入任何CPCI系统并可靠地工作[2-3]。基于CPCI总线的SAR任务管理系统具有总线数据传输速度快、可扩展能力强和控制方式灵活等特点。
1 系统功能
任务管理系统是SAR的控制核心,系统构架如图1所示。任务管理系统接收来自数据传输系统的任务列表,对任务列表的内容进行解析后转化为雷达控制指令,再将控制信息发送给雷达各系统;接收来自惯导/GPS系统的载机姿态信息,经过滤波和坐标转换处理后转发给伺服系统;接收秒脉冲和时间信息,产生时间基准;接收来自接收系统的时钟信号,以此为基准产生整机工作时序,并发送给A/D采集、信号处理、波束形成等系统;波束调度系统接收到任务管理系统的波束请求后,发送波束队列给任务管理系统;任务管理系统采集雷达各系统的BIT(built-in test)信息,在进行故障确认、相关和隔离处理后,将BIT信息转发给数据传输系统[4-5]。
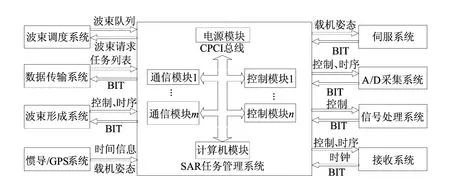
图1 任务管理系统构架
2 硬件设计
2.1 系统构架
SAR任务管理系统采用模块化设计,系统中包括电源模块、计算机模块、控制模块、通信模块及总线背板等设备。可以根据系统不同的指标要求和设备规模,对系统的设备组成进行组合、裁减和扩展[6]。
2.2 计算机模块
计算机模块是任务管理系统的核心处理单元,通过CPCI总线对控制模块和通信模块进行管理,主要由CPU、PCI桥、RAM、BIOS、键盘和鼠标接口、串口、双向并口、软盘驱动器、硬盘驱动器等组成。任务管理系统的软件与操作系统驻留在计算机模块的存储器中,实现对SAR的控制、检测和管理功能。
2.3 控制模块
控制模块用于接收来自雷达其他功能单元的状态信号,再通过CPCI总线传输给计算机模块进行处理。同时通过CPCI总线接收来自计算机模块的控制信号,并根据这些信号产生雷达整机工作所需要的时序信号。控制模块内部所有的寄存器均拥有统一的PCI总线存储空间基地址,该基地址是由软件发动PCI总线配置周期来设定的。这些存储器可以由PCI总线32位的存储读写周期来访问。
2.4 通信模块
通信模块用于接收来自其他功能单元的通信信号,再通过CPCI总线传输给计算机模块进行处理。同时通过CPCI总线接收来自计算机模块的数据,并将其转换为通信信号发送给其他功能单元。通信模块包括若干个可选的RS232C/RS422/RS485通信串口,所有通道可以被连续的32位输入输出地址段所寻址,所有通道共享1个CPCI中断,由中断寄存器来决定中断源。
2.5 电源模块
电源模块用于对任务管理系统供电,主要由直流变换器、滤波电路、取样比较放大电路和控制驱动电路组成。电源模块的核心器件是直流变换器,电源输入经直流/直流变换后,从滤波器输出。反馈电路检测输出电压,并与基准电压比较,其误差信号经过放大输入控制驱动电路,从而达到调整输出电压的目的。
3 软件设计
基于CPCI总线的SAR任务管理系统的系统软件可以分为5个功能模块:中央控制处理模块、工作模式管理模块、系统对时模块、坐标转换模块、工作时序产生模块[6],其软件处理流程如图2所示。
SAR的控制方式包括本地控制和时间匹配控制、探测任务列表控制等[7]。中央控制处理软件开始工作后,首先判断控制模式是本地控制还是时间匹配控制或探测任务列表控制,如果是时间匹配或探测任务列表控制方式,则需要将数据的格式转换为本地控制方式,再进行处理。
中央控制处理软件模块把每个子任务作为1个节点,对于按时间匹配的任务建立时间控制链表,按时间的先后顺序插入链表。执行子任务时,在收到波束形成系统发出的第1个BOK(Beam OK)信号后,执行开时序操作,否则处于等待状态。软件模块在响应波束切换信号产生的中断时,向相应的硬件端口写入控制参数,产生所需的工作时序;同时判断波束形成系统发来的波序号和目前任务管理系统执行的波序号是否一致。如果波序号不一致,则要清除波束队列,并通知波束调度系统重发波束队列;如波序号一致,则依次执行波束队列。当波束队列快执行完时,发送波束请求给波束调度系统,申请下一组波束队列[8]。当该子任务执行完毕后,中央控制处理软件模块执行关时序操作。
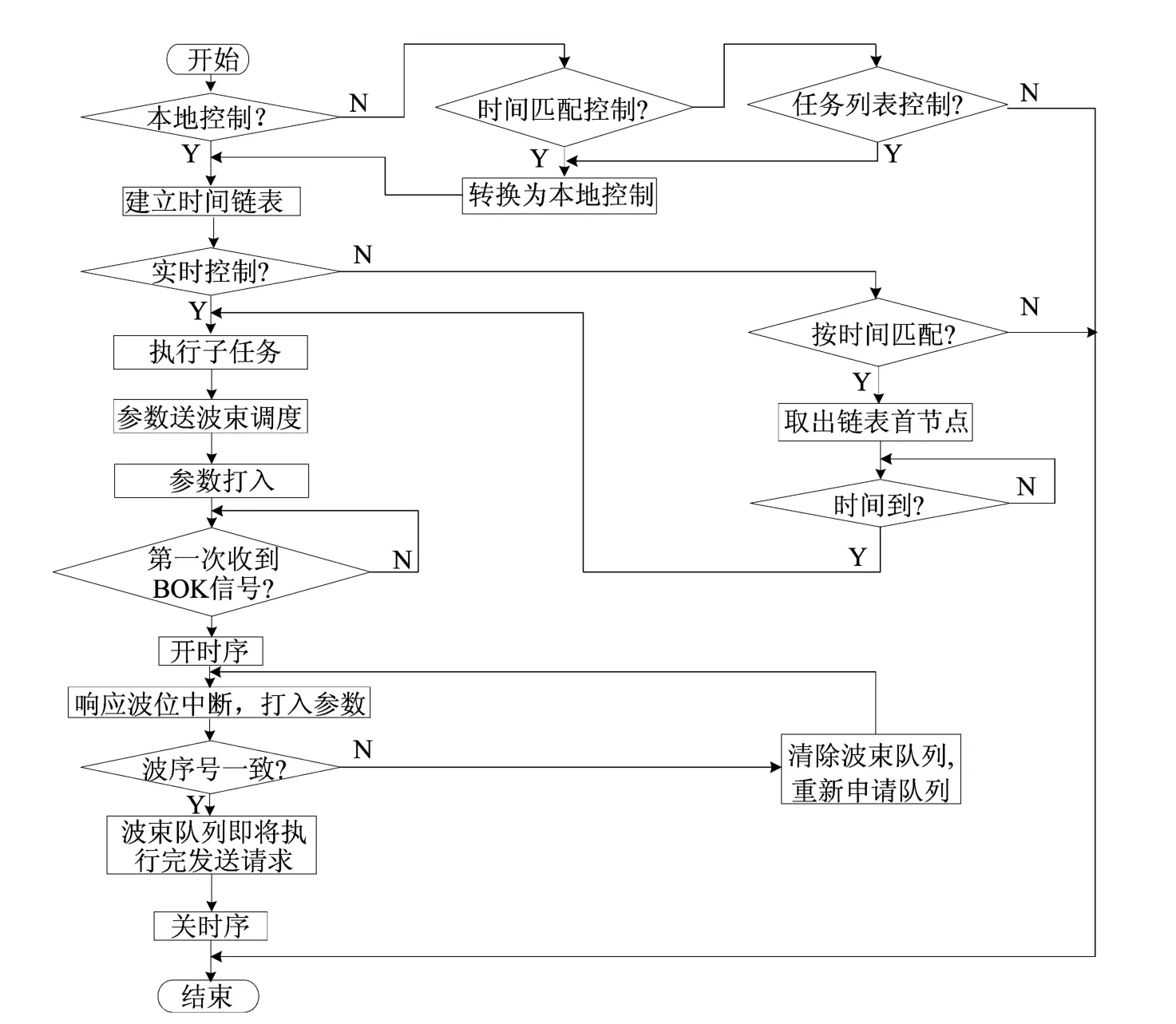
图2 中央控制处理模块软件处理流程
4 结束语
基于CPCI总线的SAR任务管理系统具有数据传输速度快、可扩展能力强、可靠性高等优点。任务管理系统软件采用基于多任务、多探测方式切换的资源调度算法,适应了SAR在多种工作模式下对任务管理控制多样化和工作模式快速切换的要求。
[1] 皮亦鸣,杨建宇,付毓生,等.合成孔径雷达成像原理[M].成都:电子科技大学出版社,2007:1-2.
[2] 李贵山,陈金鹏.PCI局部总线及其应用[M].西安:西安电子科技大学出版社,2003:2-3.
[3] 鲁千红,杨 军.基于CPCI总线的雷达信号处理系统[J].空军雷达学院学报,2007,21(2):118-120.
[4] 丁鹭飞,耿富录.雷达原理[M].西安:西安电子科技大学出版社,2002:8-10.
[5] 孟庆鼐,缪建峰.合成孔径雷达的计算机仿真技术[J].合肥工业大学学报:自然科学版,2003,26(2):203-207.
[6] 夏 勇,段玲琳,张增继,等.基于CPCI总线的机载雷达监控系统:中国,201220404271.X[P].2013-01-30.
[7] 张 红,卢广山,朱荣刚.无人作战飞机任务系统技术研究[J].电光与控制,2006,13(1):55-59.
[8] 夏 勇,张立新,尤 路,等.二次雷达波束控制系统设计[J].信息与电子工程,2012,10(3):266-269.
