基于传感器的经纬仪自动变焦系统设计
2014-12-31尹宏建高慧斌
尹宏建,高慧斌
(1.中国科学院长春光学精密机械与物理研究所,吉林长春 130033;2.中国科学院大学,北京 100039)
0 引言
光电经纬仪是对目标进行实时跟踪测量的光学设备,而跟踪的目标往往是动态的,因此,目标与经纬仪之间的观测距离也在不断变化,目标在视场中的大小就会随之变化,如果目标速度不大,运动过程中距离变化不是很明显,对观察结果不会造成太大影响;相反,如果距离变化超出一定范围,目标在视场中成像大小就会有很大差别,这对于观察目标的飞行姿态、尺寸形状,观测目标速度都是不利的[1]。
为了使目标在视场中成像大小保持不变(或基本不变),需要引入变焦技术。目前,经纬仪采用的方法都是手动变焦。手动变焦主要存在以下不足:1)画面会存在“跳跃”感,即不能实现稳定平滑变焦;2)变焦需要人为控制,实时性不高;3)不能把人从简单重复工作中解脱出来,浪费人力资源[2]。
基于以上原因,本文设计了一种基于传感器的自动变焦系统,由距离传感器传回的距离信息控制整个系统自动变焦,为以后的变焦技术提供了一种新思路。
1 自动变焦原理
光学变焦是依靠变焦距镜头来实现的,变焦距镜头通常是由前固定组、变倍组、补偿组、后固定组四光组组合的光学系统。变焦过程中前固定组和后固定组固定不动,变倍组做线性移动改变目标成像大小,补偿组做相应非线性移动补偿像面偏移。
根据镜头透射原理

式中f为变焦距镜头焦距,即四光组组合的光学系统焦距;D为观测目标距离;h为CCD(charge-coupled device)图像传感器高度;H为观测画面的实际高度。
其中,D可以由距离传感器测量,h在选用器件后为已知,H根据工程的实际需要可以设定。例如:要求对一个移动中的人物进行观察,并且希望其在视场中成像大小不变,假设人物高度1.70 m,由常识可知,要想清晰观察一个人物,人物高度约占画面高度2/3,由此知,观测画面实际高度H为人物高度1.5倍,为2.55 m。这样,对于指定工程,每次测距传感器传回一个距离值,就可以算出焦距值,而对于其他工程,重新设定H参数,同样适用。
由变焦距光学系统理论公式可知,还要满足如下关系

式中f1,f2,f3分别为前固定组、变倍组和补偿组的焦距;L1变倍组与补偿组的距离;L2固定组与补偿组的距离;f为光学系统焦距[3,4]。
由式(1)~式(3)联立可得

由式(4)、式(5)可知,由距离传感器每传回一次距离值,就可以知道变倍组与补偿组的准确位置,通过电机驱动组元到计算出的位置,从而达到自动变焦的目的[5]。
将系统光学参数代入式中,取H=2.25 m,得到变倍组与补偿组的位移曲线,如图1所示。

图1 变倍组与补偿组位移曲线Fig 1 Displacement curve of magnifier and compensation groups
2 硬件系统
2.1 变焦系统方案
自动变焦控制系统如图2所示,TMS320LF2407是设计系统的控制核心,电源提供DSP所需+5 V供电,管理计算机与DSP进行串行接口通信,距离传感器输出距离信号,经过放大,A/D转换电路作为DSP输入信号,驱动各自歩进电机带动变倍组、补偿组移动。电位计把组元位置信息反馈回 DSP,形成闭环控制[6~8]。

图2 自动变焦系统原理框图Fig 2 Principle block diagram of auto-zooming system
2.2 距离传感器
距离传感器是利用“飞行时间法”的原理来实现测量距离,以检测物体距离的一种传感器。距离传感器发射短的光脉冲,通过测量发射和物体反射回来的光脉冲时间间隔来计算距离。
本文实验测量用的是深圳思信科技有限公司的SRF200M01A—H激光测距传感器,其最大量程为1500 m,精度为0.1 m,传感器采用 RS—232接口,波特率为9600,工作供应电压9.24 V。
2.3 硬件电路设计
本自动变焦系统采用的主控芯片为TI公司的16位DSP芯片 TMS320LF2407,其内部集成外设有:32 kB的FLASH程序存储器;能达到40 MIPS的执行速度,指令周期25 ns;2.5 kB的数据、程序RAM,可扩展的外部存储器为192 kB(程序、数据、I/O空间各64 kB);定时器;看门狗;EV管理器;串行通信接口SCI,串行外设接口SPI,控制区域网络CAN;8或16通道可选的10位A/D转换器[9]。
激光测距传感器为本系统提供了关键的自动变焦信息,由于选用激光测距传感器有RS—232串口可以直接和DSP连接。串行通信接口电路如图3所示[10]。

图3 串行通信接口模块原理图ig 3 Principle diagram of serial communication interface module
本系统采用歩距角为1.8°,型号35BY007步进电机。电机驱动选择型号UP—4HB03M,适用四相混合式和两相六抽头混合式步进电机,PWM恒流控制,可选择16细分或四相八拍2种方式,驱动电流0.3A。驱动电路如图4所示,TMS320LF2407的I/O口输出脉冲信号,控制UP—4HB03M,UP—4HB03M的CP为步进脉冲输入端,上升沿有效;FREE端为驱动器脱机端,当FREE=1时,电机处于释放状态;U/D为步进电机的运行方向控制端,当U/D为高电平时,电机正转;否则,电机反转。
3 软件流程设计
本系统软件包括主程序、初始化程序、中断服务子程序、步进电机控制子程序。初始化程序主要负责初始化串行通信接口、看门狗、定时器等工作;中断服务子程序主要负责接收串行通信接口传输的距离信息;步进电机子程序控制变倍组和补偿组的移动。主程序如图5所示。首先,系统进行初始化,等待串口数据到来,检查距离值和前一采样距离值是否相等,如果相等,说明目标没有移动,不需要进行变焦处理;否则,计算此距离下目标成像大小基本不变要求的系统的焦距,然后向变倍组和补偿组步进电机发出脉冲信号,电位计返回2组元位置信息与理想值比较,若误差较大,则继续移动;若误差达到工程允许范围,则结束变焦程序。
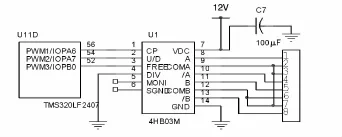
图4 步进电机驱动电路原理图Fig 4 Principle diagram of drive circuit of step motor
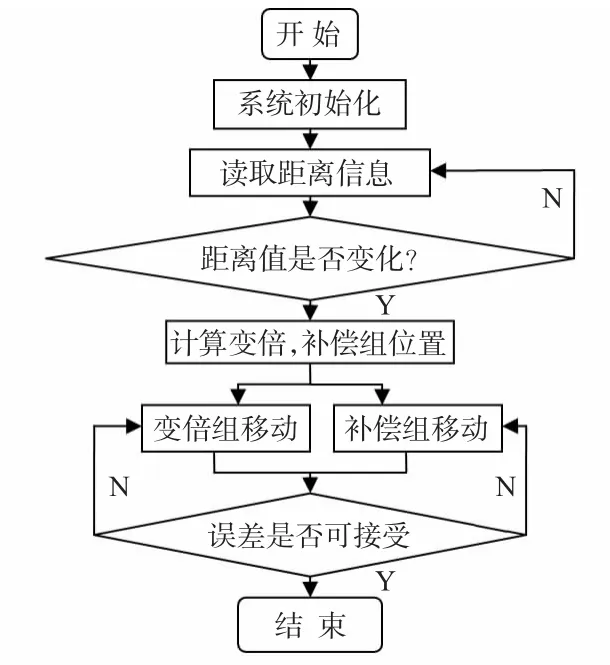
图5 程序流程图Fig 5 Flow chart of program
4 实验与结果分析
实验选用变焦镜头短焦150mm,长焦1500mm,10倍变焦。由式(1)知,目标成像大小能基本恒定的距离为79.6875~796.875 m。CCD 尺寸宽为6.4mm,高为4.8mm,观察目标为速度40~50km/h的汽车,取H为2.25m。将计算所得理论值与实际值进行对比,如表1所示。
由表1知,系统精度在0.02 mm左右,分析原因主要是因为TMS320LF2407自身ADC为10位精度,电位器长度25 mm,供电电压5 V,ADC的分辨率为0.004 88 V,A/D 转换误差为0.00488×(5/25)=0.024 4 mm。如果采用精度较高的专用ADC芯片,系统的控制精度将会更高。
对移动中的汽车进行自动变焦观察,截取观察过程中的四帧图像,如图6所示,系统的实时性令人满意,目标在观察距离(79.6875~796.875m)中快速移动时,在视场中成像大小基本恒定,满足设计和工程要求。
5 结论
本文采用激光测距传感器,设计了以TMS320LF2407为控制核心的自动变焦系统,此系统具有体积小、可靠性高、功耗低、控制精度能达到较高要求等特点。提出了一种自动变焦的理论方法,进行了硬件电路和软件流程的设计。结果表明:控制精度达到0.02 mm,对快速移动中的物体实现自动变焦,维持目标在成像面上大小基本不变,验证了方法的可行性和可靠性,为以后的自动变焦系统设计提供了一种新的思路。

表1 实验测试对比Tab 1 Contrast of experimental test

图6 自动变焦过程中图像Fig 6 Image in the process of auto-zooming
[1]许兆林,赵育良,刘建东.基于传感器的自动调焦系统设计[J].传感器与微系统,2011,30(4):111-113.
[2]Lee Won Oh,Lee Hyeon Chang,Gho Chul Woo,et al.Auto-focusing method for remote gaze tracking camere[J].Optical Engineering,2012,51(6):063204—1-063204—15.
[3]李零印,王一凡,薛 育.基于数字信号处理技术的连续变焦镜头控制系统设计[J].光子学报,2011,40(9):1346-1350.
[4]刑 辉,杨 洪,王婵娟.基于 TMS320LF2407A的连续变焦镜头控制系统[J].国外电子测量技术,2006,25(7):7-14.
[5]Kuo Tengkai,Huang Chengming,Fu Lichen,et al.A robust visual servo based headtracker with auto-zooming in cluttered enviroment[C]//IEEE Proceedings of American Control Conference,2003:3107-3112.
[6]Ptucha Raymond,Rhoda David,Mittelstaedt Brian.Auto zoom crop from face detection and facial features[J].Proc of SPIE,2013,865(7):865706—1—865706—9.
[7]Wang Zheng,Ren Jinchang,Wang Yubin,et al.Reliable camera motion estimation from compressed MPEG videos using machine learning approach[J].Optical Engineering,2013,52(5):057401—1—057401—7.
[8]陈 斌,季云飞,杨 帆.基于 TMS320F2812的测距机电路系统的设计与实现[J].激光与红外,2009,39(7):739-741.
[9]刘和平,王维俊,江 渝,等.TMS320LF240x DSP C语言开发应用[M].北京:北京航空航天大学出版社,2003.
[10]郜洪云,熊 涛,杨长城.中波红外连续变焦光学系统[J].光学·精密工程,2007,15(7):1038-1043.
