分布式MIMO抗时延算法*
2014-12-31丁永强孙玉雪王广聪任志河刘玉广
丁永强,张 嵩,孙玉雪,王广聪,任志河,刘玉广,6
(1.空军工程大学航空航天工程学院,陕西 西安 710038;2.空军第一航空学院,河南 信阳 464000;3.空军工程大学 信息与导航学院,陕西 西安710077;4.95437部队,四川 彭山620800;5.空军后勤部 司令部,北京100097;6.94923部队,福建 武夷山 354301)
0 引言
传统的采用空时分组码(STBC)编码的多输入多输出(MIMO)系统的研究大都是接收端可以同时接收到发送端发送的信息,接收到的各个天线的信息是正交的,而在实际的分布式天线系统中,并不能保证各个天线的信息同时到达目的节点,各个分布式天线之间存在相对的延迟,这样就破坏了传统MIMO系统的空时码结构,若仍采用传统的译码方式,则不能正确译码,导致了系统的性能的下降。
现在对抗天线之间相对延迟的研究主要从2个方面进行,一是设计对抗相对延迟的分布式空时码[1],二是设计处理同步误差的方法。文献[2]提出了基于行变换的空时格形码,在任意的异步中继网络中可以保持满分集的特性,可以用来解决协作系统中的异步问题。这种方式,虽然可以避免对同步的需要,但其复杂度随着最大同步错误成指数增长,限制了实际中的应用。文献[3]中提出了在Alamouti编码系统[4]中使用信道均衡技术来减轻异步传输的影响。但由于Alamouti编码不能获得满分集,所以,这种方法只能获得部分空间分集。
本文针对多路信号到达目的节点存在时延的问题,设计了一种对抗天线之间相对时延的算法,该算法通过对数据进行IFFT/FFT处理和加循环前缀的处理,使得系统具有了一定的对抗天线间相对时延的能力。仿真表明:在时延小于循环前缀长度的条件下,STBC可以正确译码,性能与理想同步情况下几乎一致。
1 系统模型
图1给出的是系统模型。本文为了分析简单,选取1个源节点、2个协作节点、1个目的节点组成的模型进行研究。多个协作节点、多个接收节点只需要在此基础上进行扩展即可。源节点将信息传输到目的节点(管理中心)需要经历2个阶段。第一阶段源节点向簇内协作节点广播信息,簇内节点间的距离比较近,信道质量较好,建模为高斯信道;第二阶段协作节点组成协作 MIMO[7,8]系统进行STBC向目的节点发送信息,距离比较远,经常不存在直达路径,建模为平坦瑞利衰落[9]信道。

图1 系统模型Fig 1 System model
2 各个节点信号的处理
2.1 源节点设计
在源节点,将准备发送的数据进行分割,分割成长度为N的OFDM符号块[5,6],2个连续的OFDM符号块可表示为

式中 (·)T为转置。将变换后的OFDM符号块调制后广播发送到协作节点。
2.2 协作节点设计
协作节点接收到源节点发送来的数据,进行解码。假设节点1和节点2译码成功。
节点1的处理如图2所示。
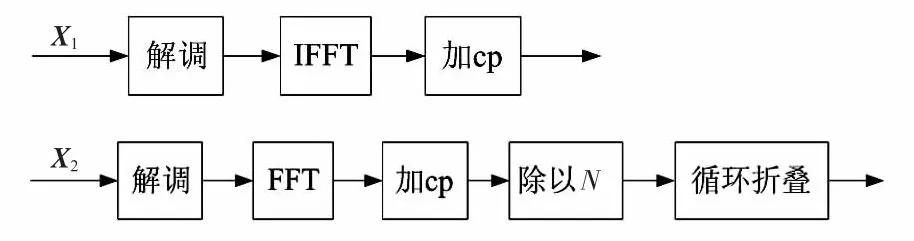
图2 节点1处理流程Fig 2 Processing flow chart of node 1
x(n)循环折叠序列y(n)定义为

经循环折叠处理后,序列的FFT可以表示为

即时域做循环折叠后的函数,其对应的FFT在频域也做循环折叠,并取共轭节点2作如图3处理。
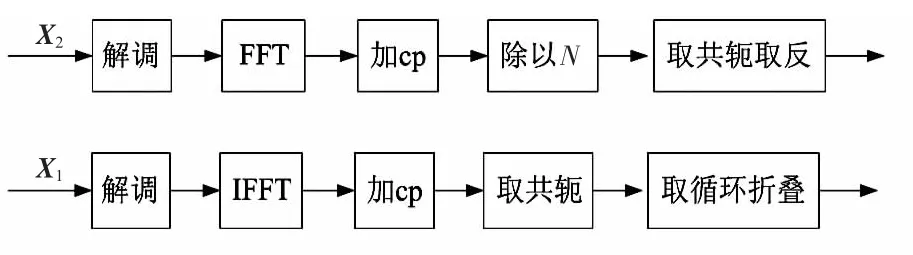
图3 节点2处理流程Fig 3 Processing flow chart of node 2
2.3 目的节点设计
目的节点的结构如图4。

图4 目的节点处理流程Fig 4 Processing flow chart of destination node
最大似然译码的处理在下一节详细分析。
3 理论分析
接收到的数据去cp后为序列的循环移位,经循环移位后,序列的FFT有以下性质

其中,X(k)=FFT[x(n)],0≤k≤N-1。
由于经历的信道状况不同,2个协作节点到达目的节点存在时间误差τ,假设第二个协作节点晚于第一个协作节点到达。因为lcp≥τ,所以,可以保证两路进行之间的正交性。时域的时间延迟与频域对应关系为

协作节点与目的节点之间经历的均是瑞利信道,噪声为加性高斯白噪声(AWGN),则目的节点接收到的信号可以表示为
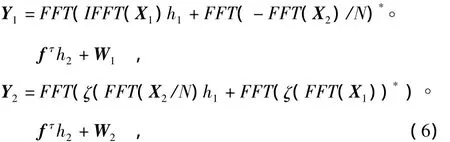
式中 ζ(·)为循环折叠;°为矩阵的直积;Wi,i=1,2为加性高斯白噪声。
采用FFT,IFFT之间的性质
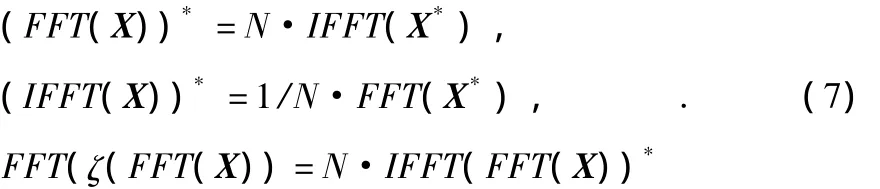
将式(8)代入式(7),求解最佳判决最大似然译码,可以得到
4 仿真结果
基于Matlab平台进行仿真。仿真中,每个OFDM符号块[5]的长度N=64,循环前缀的长度lcp=16,时延τ可以取0~15的整数,传输过程中采用的是二进制相移键控(BPSK)调制,每个符号块周期内信道状况不发生变化。
图5给出了2个中继节点完全正确译码,在τ=5情况下,传统理想同步MIMO 2发1收、2发2收的性能和采用本文提出抗时延算法异步MIMO的性能图,直接传输的曲线作为对比也在图中。从图中可以看出:本文提出的抗时延算法性能几乎与理想同步MIMO的性能相同,证明了本文给出的同步解决方案是有效的。
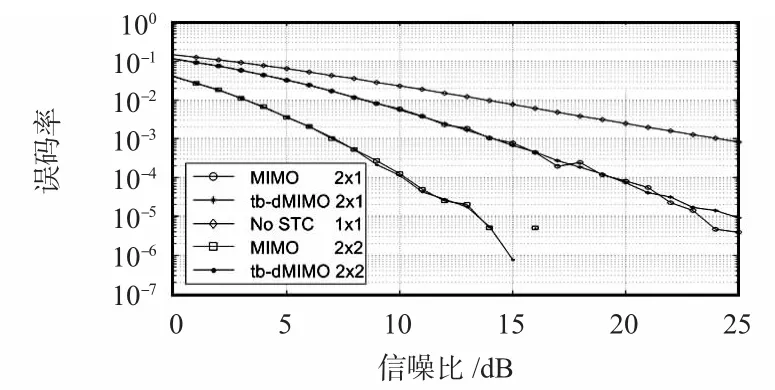
图5 中继节点完全正确译码系统的性能Fig 5 System performance of relay node entirely correct decoding
图6给出了2个中继节点并未完全正确译码,在τ=5,中继节点存在误码率均为7×10-4情况下,传统理想同步MIMO 2发1收、2发2收的性能和采用本文提出抗时延算法异步MIMO的性能图,直接传输的曲线作为对比也在图中。从图中可以看出:在低信噪比情况下,性能几乎与不存在误码的系统相同,随着信噪比的增加,系统的性能会收敛于中继节点的误码率,也就是说,对于STBC编码,不存在错误的扩散,但整个系统的性能不会好于中继节点的性能。
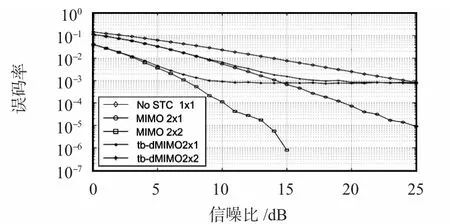
图6 中继节点存在误码传播系统的性能Fig 6 System performance of relay node having error propagation
图7给出了存在误码情况下,不同协作节点数的性能。从图中可以看出:随着协作节点数的增加,在低信噪比情况下,系统性能提高比较多,但最终都收敛于中继节点的误码率。
图8给出了2发1收协作MIMO系统不同时延误差情况下的性能曲线。可以看出,只要延时τ≤lcp,经过本文算法处理后的曲线几乎相同。

图7 不同协作节点数情况下同步性能Fig 7 Synchronization performance under circumstances of different numbers of collaboration nodes
5 结论
在分布式的MIMO系统中,由于天线分开配置,并不能保证所有天线的信号同时到达目的节点,这样对于采用STBC编码的系统来说,系统的正交性不能保证,严重影响了系统的性能。本文设计的一种对抗天线之间相对时延的算法,使得系统具有了一定的对抗天线间相对时延的能力。而且仿真表明:在时延小于循环前缀长度的条件下,STBC可以正确译码,性能与理想同步情况下几乎一致。
[1]詹 瑞,刘 俊.协作通信技术的研究进展[J].数字通信,2013(1):43-47.
[2]Li Y,Xia X G.A family of distributed space-time trellis codes with asychronous cooperative diversity[C]//International Conf on Information Processing in Sensor Networks(IPSN),2005:25-27.
[3]Ng F,Hu J,Chen M,et al.A synchronous space-time cooperative communications in sensor and robotic networks[C]//Proc of International Conf on Mech & Auto,Niagara Falls,Canada,2005:1624-1628.
[4]Alamouti S M.A simple transmit diversity technique for wireless communications[J].IEEE J Select Areas Comm,1998,16(8):1451-1458.
[5]胡 蝶,何良华,杨绿溪.快时变环境下OFDM系统中的信道估计[J].电子与信息学报,2007,29(1):113-116.
[6]Han B X,Gao Q,You X H.An enhanced iterative joint channel estimation and symbol detection algorithm for OFDM system[J].Journal of Southeast University:English Edition,2003(2):103-107.
[7]Damith S,Chintha T.Spatial multipath resolution for MIMO systems[J].IEEE Wireless Communications Letters,2012,1(1):10-13.
[8]Wang C X,Hong X,Ge X,et al.Cooperative MIMO channel models:A survey[J].IEEE Commun Mag,2011,48(2):80-87.
[9]Aleksandar D,Jin J.Estimating statistical properties of MIMO fading channels[J].IEEE Transactions on Sigal Processing,2005,53(8):3065-3080.
