一种小型动/静态双坐标感知系统结构设计
2014-12-31刘前进
赵 迪,杨 卫,刘前进
(1.中北大学 电子测试技术国家重点实验室,山西太原 030051;2.中北大学仪器科学与动态测试教育部重点实验室,山西太原 030051)
0 引言
被动式红外传感器探测系统是利用热释电材料的热释电效应检测目标的红外能量并将其转换为电压信号输出的一种测试系统。由于成本低,在民品中较广泛应用,但是其探测距离近,探测范围小,在一些应用方面受到约束[1]。目前,主要选用居里温度更高的热释电材料,体积和热量更小的特定结构与选择性更高的窗口材料等来提高红外传感器探测系统的探测距离和范围,但是由于技术与成本的原因,效果不是很理想[2]。针对军事方面特殊的应用,须满足野外作战值守时间周期长(多于15天),感知系统结构简便、实用、小型化的要求,本文选用被动式热释电红外(PIR)传感器。
针对提高被动式PIR传感器的探测距离、探测范围及无盲区探测等难题,如,全范围360°无盲区探测,一个静态红外传感器的探测范围大约为8°,那么,实现全角度探测需要的传感器数量庞大,结构复杂。为此,本文提出了一种动/静态双坐标感知系统,可以满足动态目标在动/静态双坐标感知系统中基准传递的要求。
1 热释电红外传感器的探测原理
PIR传感器的探测原理[3,4]如图1所示,主要由光学装置、PIR传感器、滤波放大模块、采集处理模块、电源模块和电机模块等组成。
光学装置的主要功能根据凸透镜成像原理收集被测目标发射的红外辐射能量,进而把它们汇聚到PIR探测器的光敏表面上引起传感器输出电压的持续变化,从而实现提高PIR传感器的探测距离的目的。

图1 PIR传感器的探测原理Fig 1 Detection principle of PIR sensor
动/静态双坐标感知系统的原理如图2所示,感知系统由动坐标系统和静坐标系统组成,动、静两坐标系的夹角为β,感知范围是感知圆以内的区域,当目标进入感知范围时,目标与感知圆的交点称为感知点,感知目标可以是人员或者车辆,目标通过感知范围的轨迹称为目标路径。动/静态感知系统分别组成2个垂直的双元十字型阵列,在坐标轴的各个方向上都安装探测系统。

图2 动/静态双坐标感知系统的原理Fig 2 Principle of dynamic/static double coordinate perceptual system
当运动目标进入感知范围,在静坐标系的4个方向至少有1个会发现目标,动坐标系统以特定的角速度在感知圆内运动,针对不同速度的运动目标,对于车辆可实现至少探测到1次的要求,对于人员,动坐标系统发现次数会更多。通过动/静双坐标系统的结合,确定在感知范围内至少有2次发现目标,已知发现目标在静坐标系的位置,根据二维坐标转换公式

可知发现的目标在动坐标系的位置,根据两点决定一条直线的原理,可以推算出目标的路径、目标行走的方位等信息,实现对目标的精确定位。利用动/静双坐标系统结合实现了对不同运动目标的无盲区探测,弥补了静态探测存在盲区的缺点。
2 动/静态双坐标感知平台的搭建
2.1 系统总体设计
动/静双坐标感知系统是基于上述动/静态双坐标感知理论由镜头定位管、PIR传感器、红外透镜、转台结构、可编程步进电机、单片机、导线、电源等部分组成,整体示意图如图3。

图3 总体设计框图Fig 3 Block diagram of overall design
2.2 各部分功能实现
2.2.1 镜头定位管
针对光学基准传递的要求,为提高PIR传感器的探测距离,根据凸透镜成像原理,选用透光率更高的红外透镜,设计结构如图4,本文中的基准传递原理[5]是用于检测各个基准面的垂直度和同轴度,使得传感器与增加的光学装置保持各自的基准面互相平行,动/静坐标系统中镜头定位管实现在同一基准面上。
鉴于以上形势,海外中资建筑企业的高质量发展,其内涵应体现在从规模优先转变为质量领先,避免过度偏重规模和数量指标的增长,从而忽视企业的可持续稳健发展。企业应紧跟国家政策方向,结合企业与当地实际市场情况,不断优化自身业务结构,把主业做精做细,在坚守自身核心竞争力的基础上,整合优势资源,扩大上下游产业链。各企业应抱团合作发展,积极开拓中高端市场,并寻求多元化经营发展。海外中资企业的多元化经营,也需要进行专业性和区域性分组,由于海外市场份额有限,避免海外中资建筑企业间的恶性竞争、搅局,应制定相应的政策措施,协调企业间的竞争,为优质企业高质量发展性提供保证。
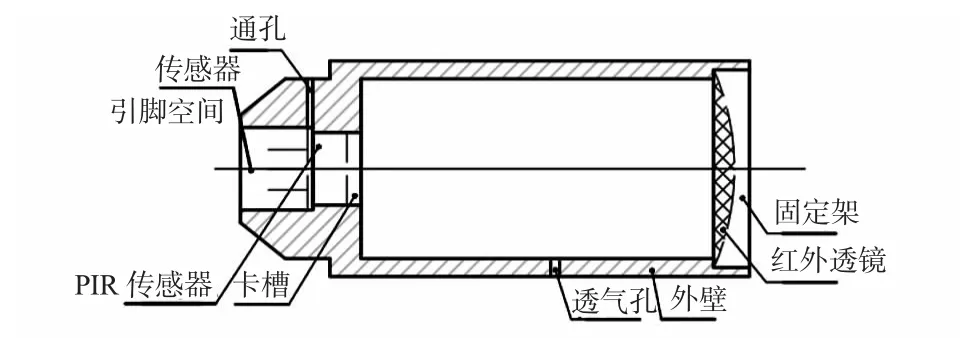
图4 镜头定位管Fig 4 Camera localization tube
该结构把红外透镜的最佳聚光点集中于PIR传感器的光敏面上,使得探测距离可达到40~50 m。其中,固定架是凸台结构,放置红外透镜;凸台的外延用来遮挡非水平方向的辐射,同时也起到保护镜片的作用;透气孔可使得定位管内外的压强相等,降低装配难度,装配完成后用硅胶固死;卡槽放置PIR传感器,轴向固定PIR传感器;在PIR传感器的引脚空间放平传感器,覆盖一层硅胶,有固定和保护传感器的双重功能,并确保了传感器与红外镜片的平度;通孔与环形凸台相通,形成凹槽,在内部卡住PIR传感器上的小凸起,在外部可以作为一个基准点,确定PIR传感器的周向位置;该定位管的顶部是梯形设计,避免与定位套筒产生干涉。
本整体结构的设计关键在于PIR传感器、传感器引脚空间、通孔之间的衔接,通过机械结构来传递基准,限制传感器安装的垂直度和水平度,从而使精度有很大提高。
2.2.2 转台结构
转台结构由转轴、定位套筒、转轴套管、转台座组成,实现PIR 360°无盲区探测目标。
转台结构的主要功能是利用一个可编程步进电机[6],根据单片机提供的信号由步进电机带动热释电传感器以特定的速度匀速摆动,这样一个PIR传感器就以特定的速率在一定范围90°内往复摆动探测目标。
转轴的结构设计如图5。

图5 转轴结构Fig 5 Rotating shaft structure
此装置的设计用于连接电机,由电机带动转动,端口有外螺纹,用来连接定位套筒。
薄壁的内外径根据实际刚度要求由以下公式确定:
空心轴的抗扭截面系数[7]


轴的最大切应力为

定位套筒的功能是连接转轴和镜头定位管,其结构如图6所示,4个侧面与4个定位管装配。通过上表面的4个很小的螺纹孔来固定定位管;下表面通过定位台与转轴结构连接,完成一个十字阵列坐标系统的实现。

图6 装配完成的定位筒与定位管Fig 6 Positioning cylinder and positioning assembled tube
2.3 动/静双坐标感知系统的实现
图7为在前述结构设计的基础上经加工装配完成后的动/静态双坐标感知系统实物图。
转台座向下固定电机,向上固定感知系统;转轴固定在电机转轴上,在步进电机带动下以固定速度转动;转轴一端通过外螺纹连接定位套筒。基于转轴转动的平稳性和小阻尼要求,转轴在螺纹的下端通过轴承与定位套管连接。4个定位管装配在定位套筒上,一套与转轴构成可旋转装置,通过单片机控制系统实现动态探测;一套与转轴套管构成静态装置,通过控制系统实现静态探测。动态探测和静态探测共同实现双坐标感知系统。

图7 感知系统平台样机Fig 7 Perception system platform prototype
3 系统测试结果
为了验证上述实验装置和原理的准确性和可靠性,针对不同的探测距离和范围,在野外进行了实验。
图8为实验结构示意图,图9为实测距离实验场景图,红外双坐标感知系统节点安装高度为50 cm,探测目标运动速度为1.1~1.5 m/s(成人正常步速),室外温度为 19°,风速2.7级。表1为运动目标从不同方向不同距离进入探测视场时检测到的运动目标实验数据处理后的结果。

图8 实验结构示意图Fig 8 Schematic diagram of experimental structure

图9 实测距离实验场景图Fig 9 Measured distance experimental scene graph
从表1所示实测信号统计结果,不难看出:针对目标从不同角度不同距离进入探测视场,本系统均能有效地捕捉到目标信息,且误差较小。
4 结论
动/静态双坐标探测系统可在不改变探测距离的情况下实现大范围的目标监测,有效探测距离达40 m左右,克服了静态探测距离短和探测有盲区的缺陷,表明该装置在探测距离和探测范围上都达到了预期的实验效果,并且具有良好的环境适应能力。

表1 运动目标从不同方向不同距离进入探测视场实验数据Tab 1 Experimental data of moving object enters detection field from different directions and different distance
此外,通过相应的改进,该探测系统还可以具有较好的抗震动冲击能力,可以满足恶劣环境条件下保证正常工作的需要,被动式PIR传感器能够达到更广泛的应用。
[1]Comaniciu D,Ramesh V,Meer P.Kernel-based object tracking[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2003,25(5):564-577.
[2]Fang J S,Hao Q,Brady D,et al.Real-time human identification using a pyroelectric infrared detector array and hidden Markov models[J].Optics Express,2006,14:145-163.
[3]彭丽静,宫世宽,李丽红.热释电红外传感器原理及应用[J].煤炭技术,2005,24(3):113-114.
[4]张 晔,杨 卫.基于热释电红外传感器探测距离影响因素的研究[J].红外与毫米波学报,2010,29(6):448-451.
[5]赵莉弘,王建民.基于基准传递原理的桥梁挠度测试方法及试验研究[J].华北科技学院学报,2010,7(2):73-77.
[6]杨宁宁,王晓明.基于步进电机的红外镜头控制组件设计[J].激光与红外,2012,42(1):81-84.
[7]许本安.材料力学[M].西安:西北工业大学出版社,2005.
