轻小型二位置光纤陀螺测斜仪惯性测量单元设计
2014-12-31焦禹舜孔庆鹏
高 爽,焦禹舜,林 铁,孔庆鹏
(北京航空航天大学惯性技术重点实验室,北京 100191)
0 引言
随着油田勘探开发的不断深入,对井眼轨迹的要求越来越精确,因此,对井斜数据的精度要求也越来越高[1]。传统的测斜仪器的测量精度不够,数据传输速率低,体积大,不能满足油气井测量仪器轻小型化的迫切需求[2]。
光纤陀螺(FOG)[3,4]轻型的固态结构使其具有可靠性高、寿命长、抗地磁干扰、能够耐冲击和振动、瞬时启动、功耗低以及有很宽的动态范围等优点。从原理上分析,光纤陀螺用于油井测斜几乎可以克服现有测斜仪器的所有缺点,是十分适用于油井测斜仪的角度传感器。光纤陀螺测斜仪是基于惯性导航技术的惯性测量单元(IMU),是一种不依赖任何外部设备,完全自主的实时而快速的测量仪器。其基本原理是根据牛顿提出的相对惯性空间的力学定律[5],利用光纤陀螺、加速度计敏感仪器沿油井井眼运动过程中的角速度、加速度,通过导航计算机进行航位推算,得到油井井眼各位置的倾斜角、方位角、工具角和相应的深度增量等参数,用以描述油井井眼轨迹。
1 系统工作原理
系统IMU空间结构组成见图1。
选择地理坐标系(东北天)作为系统导航坐标系OXnYnZn,载体坐标系OXbYbZb与测斜系统固联,用来描述载体相对于导航坐标系的姿态。导航坐标系经过3次欧拉转动(先绕Zn轴,再绕Y1轴,最后绕Z2轴)可得载体坐标系,如图2所示,其中,φ,θ,γ分别为仪器方位角、倾斜角和工具角。

图1 IMU空间结构Fig 1 Space structure of IMU
系统由导航坐标系到载体坐标系的欧拉转换矩阵可表示如公式(1)


图2 坐标系角位置关系Fig 2 Relationship between angular position and coordinate
地球自转角速度和地球重力加速度在地理系的分量为

其中,L为当地地理纬度,ωe为地球自转角速度,g为当地重力加速度。
地球重力加速度向仪器坐标系投影得到仪器坐标系各个坐标轴的加速度分量为

在测量时,仪器相对地理系静止,因此,陀螺敏感到的角速度即为地球自转角速度在仪器坐标系上投影的分量。将地球自转角速度向仪器坐标系上投影

由式(4)、式(5)推导可得出倾斜角、方位角和工具角的计算公式如下


2 系统整体方案设计
根据总体指标和成本要求进行总体方案设计。IMU主要由机械本体结构、两轴一体光纤陀螺组件、加速度计组件、小型化加速度计信号采集电路及数据处理电路组成,原理框图见图3。光纤陀螺组件用于敏感空间角速度,石英挠性加速度计用于敏感加速度。测量数据处理电路实现数据采集、补偿、通信等功能。

图3 系统整体原理框图Fig 3 Principle block diagram of overall system
2.1 系统硬件设计
2.1.1 光纤陀螺IMU设计
为了实现光纤陀螺IMU小型化、低成本和高精度,设计陀螺IMU时采用三轴一体化光纤陀螺技术[6],即三轴陀螺共用1个光源、1个光电探测器和3套处理电路。与传统光纤陀螺IMU相比,三轴一体化光纤陀螺IMU结构缩小60%,成本降低20%,功耗降低1倍[7]。上述技术特点非常适合本系统细长的圆柱体结构,借鉴上述技术,本系统采用二轴一体化光纤陀螺组合结构,见图4。

图4 两轴一体化光纤陀螺组件结构Fig 4 Structure of two-axis integrated FOG component
2.1.2 加表采集电路
由于石英挠性加速度计输出信号是模拟电流量,根据系统要求,必须设计高精度的加速度计信号采集电路,同时需要把模拟量转换成易于读取的数字量,其原理如图5所示。
模拟电流信号通过跨阻将电流信号变为电压信号,然后通过INA118仪表放大器进行放大滤波,再通过低失真的差分驱动器AD8138将单端电压信号转换成差分电压信号,最终由V/F变换成频率信号,并利用光电耦合器进行隔离,防止数模信号干扰。V/F变换采用 ADI公司的AD7742,最高工作频率高达6.144 MHz,变换线性度好,在2.75 MHz满刻度频率时,最大非线性误差为0.012%,满足系统要求。
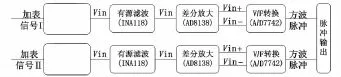
图5 加表采集电路Fig 5 Acquisition circuit of accelerometers
2.1.3 DSC+FPGA的双 CPU 结构
常见的构建导航计算机的方案有单CPU、双CPU系统结构。单CPU体系结构由DSP、ARM或者PowerPC等单CPU为核心部件[8]。双处理器系统以采用DSP+单片机和DSP+通用处理器这2种组合模式比较常见[9]。
随钻测斜应用中对导航参数的精度要求不严格,经过调研采用了微芯公司的 16位处理器[10]系列dsPIC30F6014A数字信号控制器,其作为嵌入式处理器常用于工业控制、CAN总线[11,12]。而作为核心处理器应用在测斜仪器上是一种全新的应用设计,不仅降低了成本,而且为研制轻小型化测斜仪提供了可能。
处理器采用改进的哈佛架构,具有独立的程序和数据存储器总线[13]。内部有144 kB片上闪存程序空间,8 kB片上数据RAM,4 kB非易失性数据EEPROM,省去外部扩展存储器芯片,进一步减小了硬件尺寸;工作速度最高可达30MIPS,满足100ms的系统解算周期;2个UART,2个SPI,1个I2C总线和2个CAN总线,大量丰富的外设为系统内部通信以及系统与上位机的通信提供较多选择。
FPGA 选用 Altera公司暴风3代 EP3C10U256[14],其作为导航计算机的接口电路完成对加速度计、陀螺、温度信号的采集,并对数据进行预处理,然后将完整的IMU数据打包通过RS—232接口发给DSC进行导航解算。
导航计算机硬件电路板尺寸达到了99 mm×26 mm(长×宽),很好地安装在内径为Φ35 mm测斜仪器中,本方案相比其他惯导系统上的导航计算机在成本、尺寸、功耗上都具有明显优势。对导航系统在随钻测斜领域的微小型化的推广应用具有实际意义。
2.2 系统软件设计
本文采用VC++6.0设计了光纤陀螺IMU上位机测试显控系统软件,实现传感器数据显示、上电状态监测等功能,实现对IMU各项性能参数半实物仿真验证。
导航系统软件主要分为2部分:导航解算和IMU数据采集。分别固化在DSC和FPGA中。FPGA将采集的数据打包,通过串口向 DSC每100 ms发送一帧数据,DSC在100 ms内导航解算一次并将导航结果发送给上位机。导航计算机与上位机协同工作,共同完成油井测斜。
系统工作时,先采集第一个位置的数据,然后电机带动转位机构旋转180°,采集第二个位置的数据,最后再旋转回初始位置,进行数据采集,相差180°的数据相减,就能抵消陀螺和加速度计的常值漂移。
系统软件流程图如图6所示。

图6 系统软件流程图Fig 6 Flow chart of system software
3 试验结果与分析
利用三轴转台对系统进行标定,标定完成后,对系统进行长时间静态稳定性测试;最后对系统进行转台转位模拟验证,确定仪器测量精度。
3.1 静态重复性试验
试验过程描述:将系统置于转台之上,测定前预热30 min,然后进行3组60 min静态长时间测试,测试结果见表1。

表1 常温静态稳定性测试Tab 1 Static test of stability at normal temperature
试验结果表明:两轴的光纤陀螺数据零偏稳定性均在0.2°/h以内,加速度计数据零偏稳定性均在200 μgn之内,以上均满足测斜系统进行导航解算的指标要求。
3.2 转台转位试验
光纤陀螺IMU通过夹具安装在高精度三自由度转台上,模拟自寻北光纤陀螺测斜仪定点测量工作状态,以转台转位模拟光纤陀螺测斜仪机械转位,进行井斜角和方位角在规定测量范围内的精度测量。
调整转台使倾斜角分别为 3°,30°,60°,在每一个倾斜角下分别对应着4个方位角,并记录相应状态下,系统输出的倾斜角、方位角、工具面角,记录结果如表2~表4。

表2 倾斜角3°Tab 2 Inclination angle is 3°

表3 倾斜角30°Tab 3 Inclination angle is 30°

表4 倾斜角60°Tab 4 Inclination angle is 60°
测量结果表明:轻小型二位置光纤陀螺测斜仪IMU井下三大参数的测量精度均满足油井测斜的精度要求。
4 结论
试验结果表明:基于DSC+FPGA的双CPU导航计算机方案在光纤陀螺测斜仪上是可行的,微小型导航计算机软硬件的实现将为同类井下测量仪器电路小型化提供相应解决思路。
在上述3种井斜角下系统测量的井斜角精度优于±0.2°,方位角精度优于 ±2°,工具面精度优于 ±0.5°。其成本、尺寸、功耗上都具有明显优势,以上设计均很好满足了油气井工作环境温度较高,测量仪器内径窄小等特殊应用条件,达到了更具有实用意义的轻小型化。
[1]张春熹,高 爽.自主式光纤陀螺油井测斜仪[J].仪表技术与传感器,2006(11):9-11.
[2]谢子殿,朱 秀.基于磁通门与重力加速度传感器的钻井测斜仪[J].传感器技术,2004,23(7):30-33.
[3]简红清,马迎建,高 爽,等.光纤陀螺油井测斜系统硬件研究及设计[J].惯性技术学报,2006,14(2):14-17.
[4]Lefevre Herve C.The fiber-optic gyroscope[M].张桂才,等,译.北京:国防工业出版社,2002.
[5]以光衢.惯性导航原理[M].北京:航空工业出版社,1969.
[6]吴军伟,缪玲娟,许 刚,等.微小型三轴光纤陀螺技术[J].红外与激光工程,2010,39(5):950-953.
[7]吉世涛,秦永元,万彦辉,等.三轴光纤陀螺样机研制及其关键技术[J].计算机测量与控制,2011,19(3):633-636.
[8]刘 云,赵 伟,刘建业.基于PowerPC硬核的片上捷联惯导计算机设计[D].南京:南京航空航天大学,2006:144-148.
[9]高延滨,蒋智勇.基于DSP+MCU的小型捷联惯性导航计算机系统[J].应用科技,2008,35(4):34-37.
[10]Microchip.DsPIC30F6010A/6015Datasheet[DB/OL].[2011—08—02].http:// www.microchip.com/downloads/cn/Device-Doc/cn530931.pdf.
[11]李 薇,焦方源,赖晓峰.基于dsPIC30F6014的工业现场电流电压测量系统[J].工业控制计算机,2009,22(4):55-58.
[12]杨旭东,韩雪晶,张 超,等.基于DsPIC30F6014数字信号控制器的 CAN节点设计[J].嵌入式网络技术应用,2006,22(10):133-135.
[13]石朝林.DsPIC数字信号控制器入门与实战—入门篇[M].北京:北京航空航天大学出版社,2009.
[14]Altera.cyclone3-handbook.pdf[DB/OL].[2012—07—16].http://www.altera.com.cn/devices/fpga/cyclone3/cy3-index.jsp.
