飞机纵向运动自修复控制律设计
2014-12-25姜久龙王文星李学仁杜军
姜久龙,王文星,李学仁,杜军
(1.空军工程大学航空航天工程学院,陕西西安710038;2.中国飞行试验研究院飞机所,陕西西安710089)
0 引言
飞机舵面故障包括舵面损伤、卡死、饱和以及松浮等[1],这些故障会导致飞机气动力和舵面控制效能发生变化,从而影响飞机的控制效能,造成飞机动态特性变坏,甚至失去控制。自修复飞行控制是解决该类问题的有效途径。
文献[2-3]提出设计控制重构模块补偿常规飞行控制的方法,对舵面故障时进行控制律重构。当舵面发生故障时,文献[4-5]通过自适应控制,调整飞机跟踪参考模型的输出,从而完成故障情况下的飞行控制。这些方法均取得了较好的控制效果,但在设计过程中面临着重构模块设计增加飞行控制复杂度、自适应参考模型是否准确等问题。
本文提出从舵面能量重构和控制器两方面着手,通过舵面重构能量补偿和设计精度高、鲁棒性好、对外界干扰小、能自适应调节控制参数的控制器实现飞机舵面故障时的稳定控制。
1 飞机纵向舵面失效运动模型
1.1 飞机舵面失效运动模型
平尾故障主要影响控制力矩,对升力、阻力影响较小。为了简化分析,假设在平尾故障时,其升力阻力不发生变化。
含舵面故障的推力矢量飞机纵向运动非线性数学模型为[6-7]:
其中:

式中:状态变量 α,θ,q,分别为迎角、俯仰角和俯仰角速度;Tx,Tz分别为发动机推力在飞机机体坐标系中x轴和z轴的分量;δe,δz分别为平尾和纵向推力矢量偏角。σ1表示舵面是否参与控制:当σ1=0时,如平尾卡死、饱和以及松浮等,平尾退出飞行控制操作,其状态保持故障状态;当0<σ1<1时,平尾损伤可以看作平尾部分面积损失,平尾保持基本功能,参与控制,但其控制力矩将随平尾面积损失下降。k∈[0,1]表示平尾的损伤程度,设定控制力矩与损伤程度成正比,则平尾控制量则为未发生故障uδe的 k 倍。
1.2 飞机舵面控制重构
飞机平尾故障时,可能导致不能提供足够的控制力矩,必须重构舵面控制以提供额外的控制力矩。具有推力矢量的飞机可以利用发动机尾喷管的偏转来提供额外的控制力矩,因此推力矢量一定程度上可以看作平尾的余度备份。当平尾故障或受损时控制舵面重构,推力矢量舵面提供控制力矩,弥补因平尾故障或受损引起的控制力矩损失。
链式递增舵面分配算法以平尾舵面为主舵面全时间工作,推力矢量为辅助舵面。正常飞行时只使用气动舵面保证飞机的可操纵性;当飞机平尾故障时,平尾舵面达到最大允许偏转角或偏转速度仍不足以提供控制所需的力矩,则控制力矩分配到推力矢量舵面。
2 飞机纵向舵面失效控制律设计
2.1 飞机纵向控制设计思路
在分数阶自抗扰控制器设计中,将角回路和速度回路之间的耦合项当作模型的扰动,通过控制器中的扩张观测器估计回路的扰动量。扩张观测器观测(ESO)的扰动量包括回路中的耦合项和外扰。利用估计的扰动量对系统进行动态补偿使角回路解耦为独立回路,再通过分数阶控制器的非线性配置得到回路理想的动态和稳态性能。
2.2 分数阶自抗扰控制器设计
飞机纵向运动控制器主要由跟踪微分器(TD)、扩张观测器和分数阶非线性控制器三部分组成。
跟踪微分器表达式为:

其中:
考虑俯仰角控制回路有两次积分作用,按照自抗扰控制器设计规则,该回路可看作二阶系统。要估计其状态变量和扰动量,需设计三阶扩张观测器,其表达式为:
扩张观测器的主要作用是对系统的状态进行估计输出,其性能主要由 β1,β2,β3决定。一般情况下,β1,β2,β3依次相差一个到两个级数便能得到很好的估计效果。
分数阶非线性控制器是控制器的传递函数,其模型为[8]:

式中:Kp,Ki,Kd为控制器参数;λ,μ 为分数阶阶次。
分数阶微分项采用改进的Oustaloup滤波器,其表达式为:
2.3 分数阶自抗扰控制器自适应控制
考虑到舵面重构使飞机能够在平尾损伤的情况下,通过将控制力矩分配到推力矢量舵面达到控制力矩补偿的目的。但是,当飞机系统参数和结构发生较大变化时,控制器的控制效能将不能满足动态要求,必须动态调节控制器的参数,使控制器能够适应目前的飞行状态,达到良好的动态控制效果。
当系统控制稳定后,影响分数阶自抗扰控制器控制误差的主要参数有Kp,Ki,Kd。在系统初始响应时间内,为了保证系统有较快的响应速度,Kp的初始段应较大;在误差逐渐减小时,Kp也应随之减小,使得系统惯性逐渐减弱,不至于产生大的超调量。Ki积分信号的作用在于消除稳态误差,为了防止超调和产生振荡,当误差信号较大时Ki增益要小;而当误差信号较小时,则要增大Ki增益。在系统初始响应时间内,Kd的取值应该逐渐增大,可以在不影响速度的情况下,抑制超调量的产生;当系统产生超调量时,Kd增加幅度要大,使之更快的消除增益。由上述规律可以得到调节参数随误差的变化曲线如图1所示。
根据图1所示,非线性曲线描述可由文献[9]所提的sech函数给出:

式中:c1为Kp的变化速率;a1,b1为调节参数。

式中:c2为Ki的变化速率;a2,b2为调节参数。

式中:c3为的变化速率;d3为e(t)的变化速率;a3,b3为调节参数。

图 1 Kp,Ki,Kd 随误差变化曲线Fig.1 Changes of Kp,Ki,K d with error
在分数阶自抗扰控制器中,微分跟踪器可以提供信号的过渡过程和变化律,而扩张观测器估计的状态中有被控对象的变化率,两者的差即为误差的变化率,避免了在实际工程中微分环节难以实现的问题,有利于工程实践。分数阶自抗扰控制器参数自适应调节控制结构如图2所示。
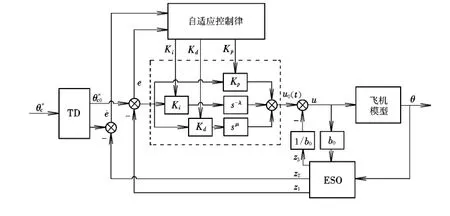
图2 分数阶自抗扰控制器参数自适应调节控制框图Fig.2 Parameter self-adaptive adjustment control of fractional active disturbance rejection controller
3 仿真分析
仿真初始条件设置为:H=2 000 m,V=250 m/s,初始水平舵偏量为δe=2.3°,推力矢量偏角为δz=0°,发动机推力在仿真中固定为100 kN;微分跟踪器:R=100,δ=0.1;扩张观测器:β1=75,β2=500,β3=1 000,a1=a2=a3=0.5,δ1= δ2= δ3=0.002 5。
由于分数阶自抗扰控制器在参数固定的情况下具有很好的鲁棒性,因此在参数自适应控制律设计中,设计自适应控制律在本文固定参数基础上进行调节。设置Kp的变化范围为[65,105],Ki变化范围为[0,2.3],Kd变化范围为[55,75]。因此得到各参数自适应律的整定参数为:Kp:a1=65,b1=40,c1=10;Ki:a2=2.3,c2=10;Kd:a3=55,b3=20,c3=1,d3=100。
仿真输入信号为20°的方波信号,舵面故障分别按照平尾损伤0%和80%进行仿真,得到舵面故障情况下飞机的动态响应,检验分数阶自抗扰控制器的控制效果。仿真结果如图3~图7所示。
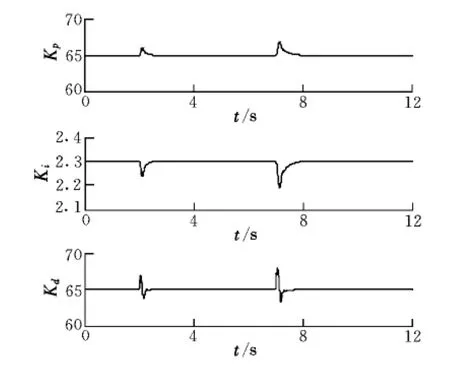
图3 平尾损伤0%时控制参数变化曲线Fig.3 Change of control parameters with 0%tail actuator damage
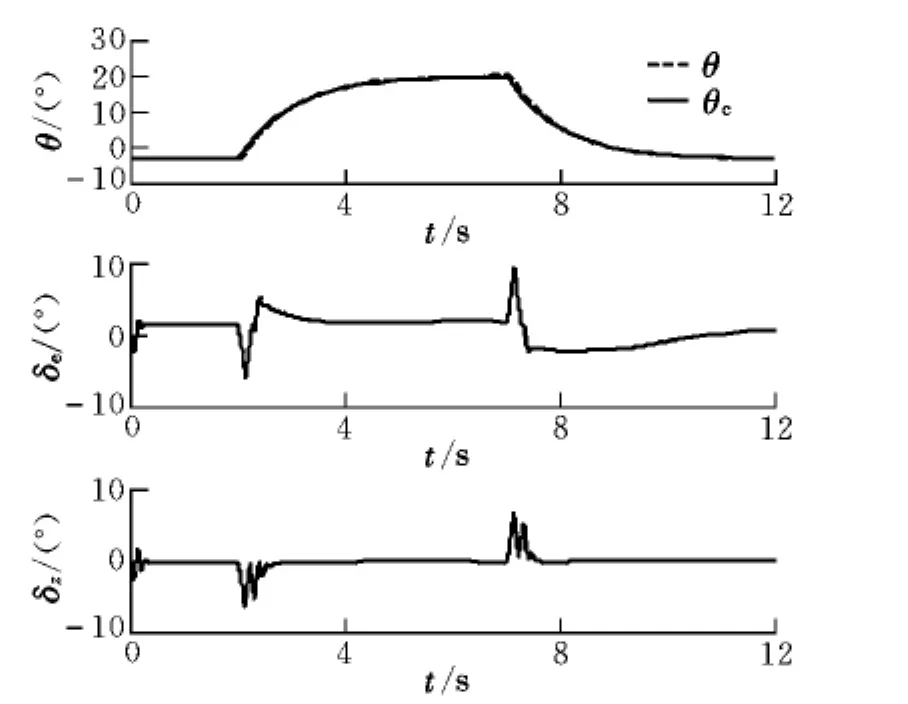
图4 平尾损伤0%时飞机状态和舵面动态过程Fig.4 Aircraft state and actuator dynamic progress with 0%tail actuator damage
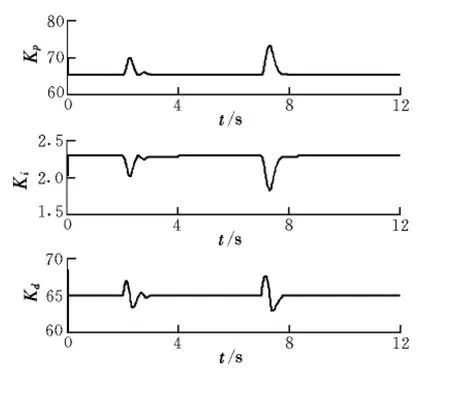
图5 平尾损伤80%时控制参数变化曲线Fig.5 Change of control parameters with 80%tail actuator damage
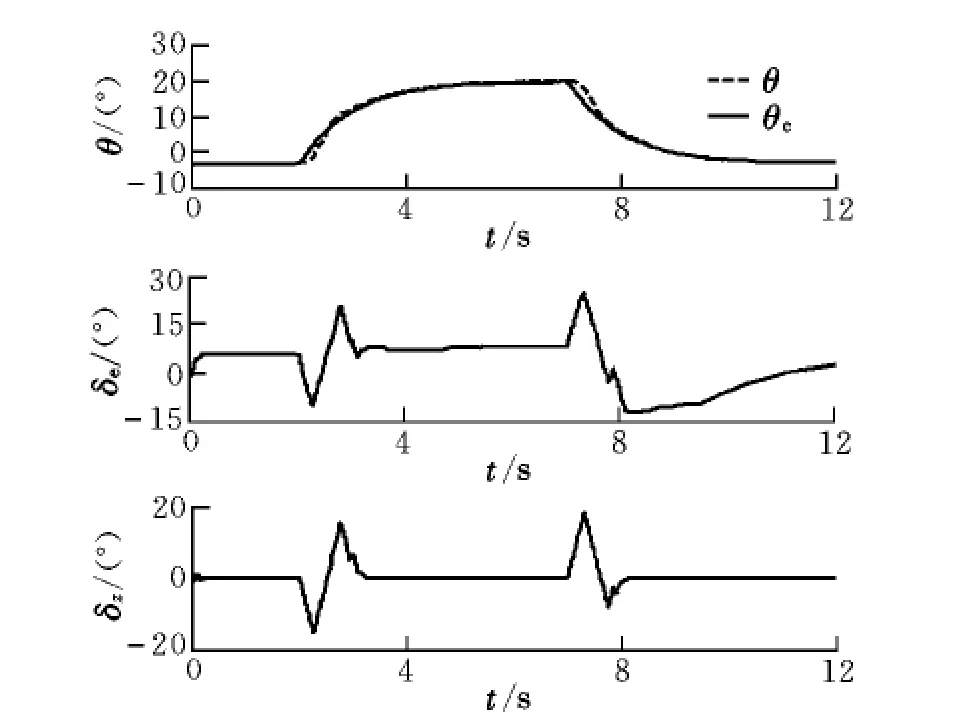
图6 平尾损伤80%时飞机状态和舵面动态过程Fig.6 Aircraft state and actuator dynamic progress with 80%tail actuator damage
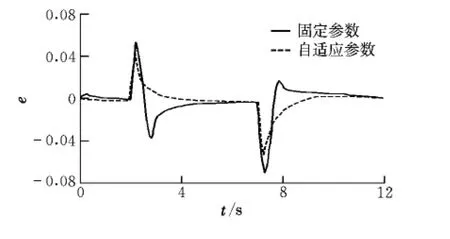
图7 平尾损伤80%时控制误差对比Fig.7 Comparison of controll errors with 80%tail actutor damage
仿真结果表明:当舵面正常和损伤不大时,由于分数阶自抗扰控制器具有良好的鲁棒性,可以很好地完成飞行控制,不需控制器调节参数即可实现飞机舵面自修复控制。当舵面损伤大于80%时,控制效果变差,采用参数自适应变化后控制效果得到改善。为此对比在舵面大面积损伤时,采用固定参数和参数自适应方式控制效果。由图7可知,当舵面损失80%时,采用自适应控制律进行参数调整后,控制性能得到明显改善,误差振荡的情况减少,超调很小,获得了良好的控制效果。
4 结束语
飞机舵面失效会导致飞机构型发生变化,为了达到稳定控制的目的,引入推力矢量将因平尾损失的力矩分配到推力矢量舵面上,实现舵面损失而控制量不损失,同时高鲁棒性的自适应参数调节控制器的应用较好地解决了控制模型结构参数变化时的稳定控制。该方法的优势在于:估计和补偿由于平尾损失导致的控制模型扰动,无需准确的失效模型;针对控制结果的非线性函数自适应调节控制器参数简单可靠、便于工程实现。但也应该注意到,舵面失效也会影响气动力的变化,考虑气动变化情况下的舵面重构及耦合控制将需要进一步研究。
[1] 张明涛,安锦文.控制舵面故障下的飞机运动建模与重构控制能力分析及设计[J].信息与控制,2010,39(5):588-595.
[2] Boskovic JD,Prasanth R,Mehra R K.Retrofit fault-tolerant flight control design under control effector damage[J].Journal of Guidance,Control,and Dynamic,2007,30(3):703-712.
[3] Paga A B,Meloney DE.Flight testing of a retrofit reconfigurable control law architecture using F/A-18C[R].AIAA-2006-6052,2006.
[4] 宋述杰,苏浩秦,邓建华.具有自修复功能间接自适应飞行控制系统研究[J].飞行力学,2007,24(3):40-44.
[5] 刘小雄,章卫国,武燕,等.基于直接自适应控制的重构飞控系统研究[J].控制与决策,2007,22(4):440-444.
[6] 熊治国,孙秀霞,尹晖,等.自抗扰控制器的飞机纵向运动控制律设计[J].电机与控制学报,2006,10(2):420-423.
[7] 王峰,孙秀霞,王洪亮.基于自抗扰控制器的飞机纵向自修复飞行仿真[J].系统仿真学报,2009,21(4):1020-1023.
[8] Han Jing-qing.From PID to active disturbance rejection control[J].IEEE Transactions on Industrial Electronics,2009,56(3):900-906.
[9] 肖永利,张琛.位置伺服系统的一类非线性PID调节器设计[J].电气自动化,2000,22(1):20-22.
