吸气式高超声速飞行器分离动力学建模及仿真
2014-12-25李永涛屈香菊谭文倩
李永涛,屈香菊,谭文倩
(北京航空航天大学航空科学与工程学院,北京100191)
0 引言
高超声速飞行器在交通运输方面可以缩短航行时间,在航天运载方面可以节省能源、降低发射成本,在军事方面将给未来战争提供前所未有的进攻便利和防御难题,因此近年来成为国内外研究的热点[1]。吸气式高超声速飞行器是高超声速飞行器研究的一个重要领域。由于现有的动力装置很难实现吸气式高超声速飞行器的直接入轨,因此这类飞行器通常需要在载机的携带和运载火箭的助推下,在一定高度实现验证飞行器与运载火箭的分离。而验证飞行器与运载火箭分离时,由于两者处在高动压、高马赫数、高雷诺数的环境下,气动力相互干扰,使得飞行器所处的流场变化复杂。同时,在分离过程中还要保证两级飞行器之间不会发生碰撞,且验证飞行器在分离末端达到预定的飞行条件,因此带来了验证飞行器与运载火箭之间的安全分离问题[2-3]。
分离动力学建模及分析是研究分离问题的基础。目前这方面的工作大多集中于分离过程中的多体运动仿真,文献[4-10]主要针对运动体的动力学进行了描述,还没有涉及到控制需求分析和控制设计模型建立方法。为此,本文从验证飞行器纵向控制系统设计出发,研究高超声速飞行器分离过程中的纵向三自由度运动,考虑分离过程的级间气动干扰,基于运动特征分析,提出控制需求和控制策略。作为系统仿真模型的验证,以美国X-43A为仿真算例,设置级间分离仿真条件,在Matlab/Simulink环境下进行仿真实现,对验证飞行器级间分离过程进行仿真分析。
1 分离时序与控制需求
对于双级入轨吸气式高超声速飞行而言,验证飞行器由运输机运载至一定高度后空中发射,数秒后运载火箭点火,整体飞行器进入水平飞行阶段,加速到适宜的飞行速度后,验证飞行器与运载火箭开始分离,记此时刻为t0,选取此时刻为高超声速飞行器分离阶段的起始点。这时验证飞行器与整体飞行器还未正式分离,真正的分离发生在分离推杆开始工作后。在分离推杆的作用下,两飞行器以一定的相对分离速度开始正式分离,至分离结束时,记此时刻为tend。根据分离推力作用时间及运载火箭与验证飞行器之间的相互干扰作用,可以将分离过程划分为以下几个阶段:
t0~t1:在分离推杆的作用下,验证飞行器与运载火箭开始分离,在t1时分离推杆达到最大长度,不再有推力作用。
t0~t2:这段时间内,由于运载火箭与验证飞行器距离很近,飞行器之间有着较强的级间气动干扰效应。
t2~t3:验证飞行器处于从气动干扰区到自由飞行区的过渡阶段。
t3~tend:两级飞行器之间达到一定距离,可以认为两者之间不再存在级间干扰效应,以自由飞行的方式运动,直到分离阶段结束。
为了实现验证飞行器与运载火箭的成功分离,分离过程中,控制条件需要满足以下要求:分离的开始阶段,应确保两级飞行器不会发生重新连接;控制飞行器瞬时的行为,避免操纵面超出位移或速率限制;验证飞行器在分离结束阶段的末端达到目标迎角,进入超燃冲压发动机的测试阶段。
2 分离动力学建模
2.1 飞行器动力学模型
高超声速分离过程中,侧滑角和滚转角相对于纵向状态量为小量,高超声速飞行器质量特性近似对称,因此在本文的研究中,仅考虑包含在纵向平面的平移运动和俯仰运动。由于验证飞行器飞行马赫数大、高度高,因此平面地球假设不再成立,采用球形地球假设。
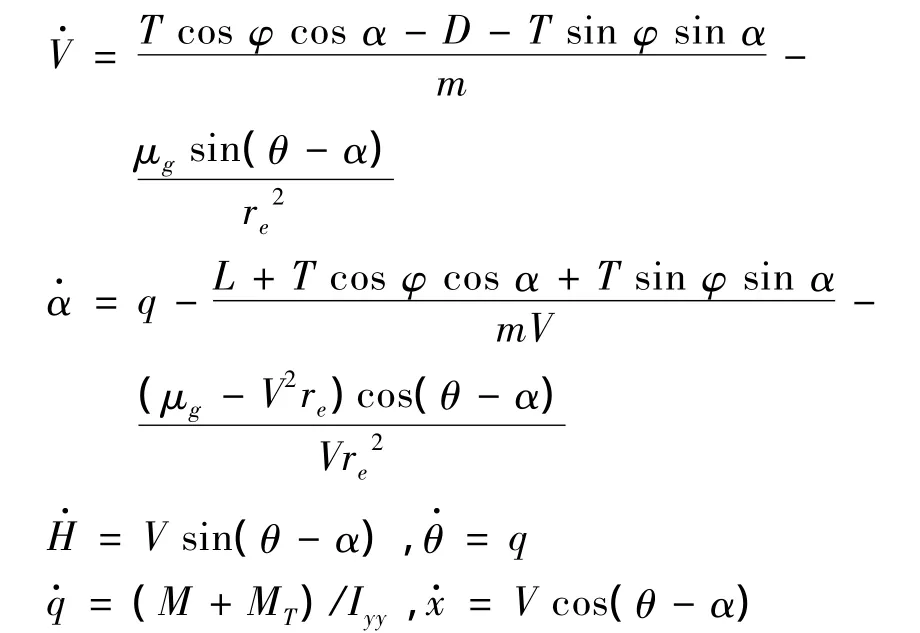
验证飞行器与运载火箭分离过程中,在纵向平面内,验证飞行器受到的外力主要有重力、分离推杆推力以及气动力。气动力包括轴向气动力和法向气动力。分离推力在机体轴系内可以表示为T=[T cosφ,0,T sin φ]T,其中 φ 为分离推力与体轴系x轴之间的夹角。作用于验证飞行器上的力矩包含两部分:一部分为气动力作用在飞行器上的气动力矩,主要指俯仰气动力矩;另一部分由分离推力提供。考虑地球曲率半径对纵向运动的影响,高超声速飞行器纵向动力学模型为[11]:
2.2 分离推力与气动力模型
整体飞行器到达预定分离环境后,在分离推力作用下,验证飞行器开始与运载火箭分离。分离推力通常是冲程的函数。当推杆达到最长伸长距离时,推杆断开,推力作用消失。

式中:l为分离推杆的冲程,在分离过程中,冲程是时间t的函数,即l=l(t);lmax为分离推杆的最大伸展长度。
气动力的测定非常复杂,很难用确切的数学公式来表达。尤其在气动干扰区和过渡区,气动力不仅与分离环境、验证飞行器本身的构型有关,也与运载火箭之间的相对位置、相对姿态有关[12]:

式中,Δs,Δθ分别为两级飞行器之间的相对位置及相对姿态。
气动力的计算基于以下三段进行解算:
(1)t0~t2:验证飞行器与运载火箭刚开始分离,两者之间由于距离较近,具有较强的干扰效应,这时气动系数的选择从气动数据库可以查得。
(2)t2~t3:气动系数可以认为是从干扰区到自由区的线性变化。
(3)t3~tend:脱离干扰阶段,进入自由飞行段。文献[13-14]指出,在自由飞行段,验证飞行器气动力及其力矩系数是马赫数、迎角以及升降舵偏角的函数,基于插值方法可以得到气动系数。
2.3 控制器模型
高超声速飞行器的舵机动力学特性可通过一个二阶线性系统模型描述:

式中:ω为固有频率;ζ为阻尼系数。
分离段高超声速飞行器纵向控制器的主要作用是控制迎角保持俯仰稳定,并在分离结束阶段达到目标迎角。由于吸气式高超声速飞行器在飞行过程中迎角需要精确控制,在本文的研究中采用内外环结构设计控制律。在内环引入俯仰角速度反馈,提高系统的阻尼特性,使系统动态过程具有良好的收敛性能,进而改善飞行器开环系统的动态响应。在外环引入迎角反馈,保证飞行器对迎角的快速、精确控制。根据第1节的控制需求分析,设计分段控制器如下:
(1)t0~t1:俯仰角速度反馈回路和迎角反馈回路都未闭合,给验证飞行器一个开环的正的升降舵偏置指令,这样是为了增加尾部升力,加快两级飞行器之间的分离。
(2)t1~t4:俯仰角速度反馈回路闭合,迎角反馈回路未闭合,这样是为了避免出现过大的舵面偏转。记t4为迎角反馈回路的闭合时间。
(3)t4~tend:俯仰角速度和迎角反馈回路都闭合,跟踪指令迎角信号,达到预定的工作迎角。
2.4 仿真模型
集成所建立的飞行器运动模型、推力模型、气动力模型、控制模型,并加入大气环境模型,建立Matlab/Simulink闭环控制系统仿真模型,如图1所示。其中,大气环境模块采用标准大气模型。

图1 系统仿真模型Fig.1 System simulation model
3 分离动力学仿真及分析
3.1 分离条件与构型参数
选取分离的起始时刻为仿真起点。验证飞行器构型参数如下[4-5]:质量 1 242 kg,平均气动弦长3.66 m,参考面积 3.36 m2,惯性矩 1 102 kg˙m2。飞行器分离起始条件如下:高度28 956 m,马赫数7.08,速度 2 167 m/s,俯仰角速度 0.22(°)/s,动压50 429 Pa,温度233.2 K,航迹角2.009 41°,迎角 0°。
3.2 力/控制器模型数据和参数
3.2.1 分离推力与气动力数据
在X-43A与运载火箭的分离试验中,分离推力是由对称安装的两个分离推杆提供的。推力作用线与飞行器x轴成4°夹角,位于验证飞行器重心之上,因此会产生一个附加的低头力矩。在本文的研究中,分离推力参考文献[4-5],是时间的函数。文献[4-5]给出了 Ma=7,升降舵偏角分别为0°和7.5°时,飞行器气动系数随迎角的变化曲线。以此为数据基础,在计算机数值算法中,以马赫数、迎角、升降舵偏角为变量,进行三维插值,求出自由飞行区验证飞行器的气动系数。
X-43A进行的三次飞行试验表明,分离过程中飞行马赫数变化很小。因此,在本文的研究中,自由飞行区气动系数的测定采用迎角、升降舵偏角为自变量的二维插值计算。图2给出了在自由飞行区域,Ma=7时气动力系数随迎角、升降舵偏角变化的二维插值曲面图。
3.2.2 控制器参数及控制律设计模型
最大舵面偏转速率与舵面受到的载荷相关[5]。本文研究中,升降舵位置限幅为 -15°< δe<15°,舵面最大偏转速率为±120(°)/s,舵机的固有频率和阻尼系数分别选择为ω=100 Hz,ζ=0.7。
为了分析验证飞行器的动力学响应特性,以t0时刻的运动状态为基准运动,在初始分离点附近将飞行器纵向模型微分方程按照小扰动原理进行近似线性化处理,求得纵向运动的特征值。得到长周期和短周期的特征值、固有频率和阻尼比分别为(-0.001 6 ±0.006 2i,0.006 4,0.248 4),(-0.023 0±5.518 4i,5.518 5,0.004 2)。可以看出飞行器纵向运动有两对共轭复根,对应于4个特征根,特征根的实部都小于0,说明飞行器纵向运动模态是稳定的。其中,代表长周期模态的两个特征根是一对较小的共轭复根,实部靠近于虚轴,说明长周期模态是接近中性稳定的。代表短周期模态的两个特征根是一对较大的共轭复根,表明飞行器短周期阻尼系数较小,机体的动态性能较差,系统无法快速收敛,必须借助飞行控制系统来提高动态过程品质。
控制回路的闭合流程为:
(1)0~100 ms,俯仰角速度反馈回路和迎角反馈回路都未闭合,给验证飞行器一个开环的初始6°的升降舵偏置指令;
(2)100~500 ms,俯仰角速度反馈回路闭合,迎角反馈回路仍未闭合;
(3)500~2 500 ms,控制器切换,俯仰角速度和迎角反馈回路都闭合;t=500 ms,控制器发出一个迎角指令信号,使分离末端飞行器迎角达到2.5°。
仿真中控制参数的选取基于飞行器短周期运动品质设计,所选择的反馈控制参数如表1所示。
3.3 动力学仿真
根据建立的数学仿真模型,得到了分离过程中飞行器主要参数的时域仿真图,如图3和图4所示。

图3 速度V和高度H随时间变化曲线Fig.3 Change of velocity V and height H with time
从图3中可以看出,在分离过程中,验证飞行器速度先增大后减小,这是因为在t0~t1时间内分离推杆所提供的推力大于阻力,因此速度增大;推力作用消失后,由于受到阻力的作用,速度再逐渐减小。分离过程中,动能损失小。还可以看到,飞行器飞行高度逐渐增大,这是因为分离中验证飞行器始终有一个正的航迹角,因此飞行高度逐渐增大;高度变化速率逐渐减小,说明验证飞行器的分离阶段同时是改出爬升并进入定直平飞的阶段;分离过程中,说明空中降落高度损失小。

图4 俯仰角θ、迎角α、航迹角μ及俯仰角速度q随时间变化曲线Fig.4 Change of pitch angle θ,AOA α,flight path angle μ and pitch rate q with time
从图4中可以看出,俯仰角先减小后增大。分离初始时间t0~t1内,在气动力和分离推力的作用下,俯仰角减小至θmin=1.64°,达到了分离初期减小俯仰角以减小碰撞概率的目的。随着反馈回路的闭合,俯仰角逐渐增大,在t=0.81 s时俯仰角达到θmax=3.87°,之后缓慢减小,姿态变化平稳。迎角先减小后增大,t0~t1时间内,在气动力矩和分离推力的作用下,迎角减小至 αmin=-0.33°。t1~t4时间内,随着俯仰角速度反馈回路的闭合,迎角迅速增大。t4时刻,迎角反馈回路闭合,迎角逐渐平衡,在t=1.5 s时,迎角基本达到平衡2.50°。分离末端航迹倾角μend=0°,保证了验证飞行器能够进入定直平飞的试验状态,说明了分离阶段也是验证飞行器改出爬升、进入定直平飞状态的阶段。还可以看出,在分离末端,验证飞行器以q=-0.87(°)/s的俯仰角速度低头运动。
图5给出了升降舵偏角随分离时间的变化关系。可以看出,δemax=13.04°,升降舵偏角变化满足限幅条件,变化速率合理,保证了验证飞行器能够达到迎角指令。在分离过程中,升降舵偏置大小的整体变化趋势先增大后减小,最后稳定在δe=5.35°。

图5 升降舵偏角δe随时间变化曲线Fig.5 Change of elevator deflection δe with time
计算结果表明:在控制器作用下,起始时刻飞行器俯仰角减小,加速了两级飞行器尾部的分离,保证了验证飞行器与运载火箭不会发生碰撞。分离末端航迹倾角达到0°,且能够快速跟踪到迎角指令,保证了验证飞行器能够进入定直平飞的试验状态,满足控制需求与试验要求。分离过程中,验证飞行器运动参数变化平稳,姿态调节有效,舵面偏转速率与偏幅变化合理。
本文得到的飞行器运动状态响应及气动参数变化均能体现分离过程的重要特征,将得到的结果与高阶模型所得到的仿真结果[5-6]进行比较,表明纵向运动有很好的一致性,验证了分离控制策略的正确性。
4 结束语
根据吸气式高超声速飞行器分离阶段特殊的飞行动力学特性以及不同的子飞行阶段动力学特征,提出了分离段的控制设计需求及控制策略,建立了基于Matlab/Simulink的高超声速飞行器控制仿真系统,设计了分离过程中各子阶段的自动飞行控制律,并以某型高超声速飞行器为例进行了仿真验证。仿真结果表明,所建立的系统能够完成对高超声速飞行器分离过程的仿真模拟,得到的飞行器气动系数时间响应、运动参数时间响应以及控制面动态过程能合理体现分离运动的重要特征,控制策略切实可行。该研究为高超声速飞行器分离阶段的理论研究及工程实现提供了一定参考。在此基础上,可以进一步提炼安全分离要素,研究安全分离准则及满足准则的飞行器控制设计方法。
[1] Prisell E.The scramjet:a solution for hypersonic aerodynamic propulsion[R].AIAA-2005-3550,2005.
[2] Bahm C,Baumann E.The X-43A Hyper-X Mach 7 flight 2 guidance,navigation,and control overview and flight test results[R].AIAA-2005-3275,2005.
[3] Joyce P J,Pomroy J B,Grindle L.The Hyper-X launch vehicle:challenges and design considerations for hypersonic flight testing[R].AIAA-2004-5385,2004.
[4] Tartabini PV,Bose D M,McMinn J D,et al.Hyper-X stage separation trajectory validation studies[R].AIAA-2003-5819,2003.
[5] Peter A L,Habchi SD,Engelund W C,et al.Stage separation analysis of the X-43A research vehicle[R].AIAA-2004-4725,2004.
[6] Buning P G,Wong T C,Dilley A D.Computational fluid dynamics prediction of Hyper-X stage separation aerodynamics[J].Journal of Spacecraft and Rockets,2001,38(6):820-827.
[7] 张宛,郭建国,林鹏,等.高超声速飞行器多子分离建模仿真与分析[J].计算机仿真,2011,28(11):36-40.
[8] 肖其虎,唐硕.运载火箭空中发射的分离运动分析[J].导弹与航天运载技术,2000(4):13-17.
[9] 李本岭,陆宇平.高超声速飞行器非对称分离动力学建模及仿真[J].长春理工大学学报,2006,29(1):118-122.
[10]田霖,屈香菊,谭文倩.高超声速飞行器发射段运动模态特征分析[J].飞行力学,2013,31(1):10-14.
[11]鲍文,姚照辉.综合离心力/气动力的升力体高超声速飞行器纵向运动建模研究[J],宇航学报,2009,30(1):128-135.
[12]朱仁璋,汤溢,李颐黎,等.神州飞船逃逸救生分离动力学分析[J].航天器工程,2004,13(1):132-140.
[13] Clarks A,Wu C,Choi S,et al.Development of an airframe-propulsion integrated generic hypersonic vehicle model[R].AIAA-2006-0218,2006.
[14] Bermudez L M,Gladden R D,Jeffries M S,et al.Aerodynamic characterization of the Hyper-X launch vehicle[R].AIAA-2003-7074,2003.
