“过程控制”课程计算机仿真教学探讨
2014-12-25杨杨,叶多
杨 杨,叶 多
(1.南京邮电大学 自动化学院,江苏 南京 210023;2.南京市职业教育(成人)教学研究室,江苏 南京 210018)
1 概述
从课程体系上来看, “过程控制”是 “自动控制原理”课程的延伸和扩展,在自动化专业的课程体系中占有重要的地位。过程控制通常是指连续生产过程的自动控制,与工业生产过程联系密切[1,2]。随着科学技术的不断进步,尤其是控制理论日新月异,过程控制技术也在飞速地发展,主要经历了简单控制、复杂控制以及先进控制等阶段。这些技术不仅对于传统工业起到了提高质量、节约能耗、减少环境污染等重要作用,而且正在成为新建的规模大、结构复杂的工业生产过程中不可缺少的技术手段[3]。因此,为胜任未来的工作任务,掌握过程控制的基本知识和技能对于自动控制专业的学生至关重要。
另外一方面,MATLAB是Matrix和Laboratory两个单词的组合,意为矩阵实验室,它是由美国科学计算软件供应商领导者Mathworks公司发布,主要面向科学计算、可视化以及交互式程序设计,其中Simulink是MATLAB最重要的组件之一,提供了一个动态系统建模、仿真和综合分析的集成环境[4]。该软件为自动化类课程的教与学提供了强有力的工具。
目前,“过程控制”课程开设了面向实物的相关实验,如三容水箱控制系统等,但在实际教学过程中鉴于实验课时和场地的限制,部分学生仍不能从整体上把握知识体系、牢靠地掌握相关知识点。作为实验环节的补充,笔者设计了基于MATLAB/Simulink编程环境的计算机仿真案例,融合自动控制原理、MATLAB等先修课程内容,理论和实践相结合,从系统层面加强学生对过程控制系统认知程度,藉此增强学生对系统设计、参数调整的直观认识,从而提高学习兴趣,在理解中掌握知识点、构建专业知识体系。
2 教学中计算机仿真的设计
本节将从单回路控制系统的参数整定、串级控制系统、调节器参数变化对控制过程的影响等方面设计计算机仿真教学实例。从知识体系上来看,从模型到系统、从单回路简单控制系统的设计向多回路复杂控制系统的构建逐步延伸和拓展,贯穿其间的是PID调节器,设计的案例密切联系教学大纲,同时注意到了知识点的承上启下和交融性。
2.1 单回路控制系统的参数整定
测得某工业过程的单位阶跃响应数据 (附表从略)、单位阶跃响应曲线,如图1所示:
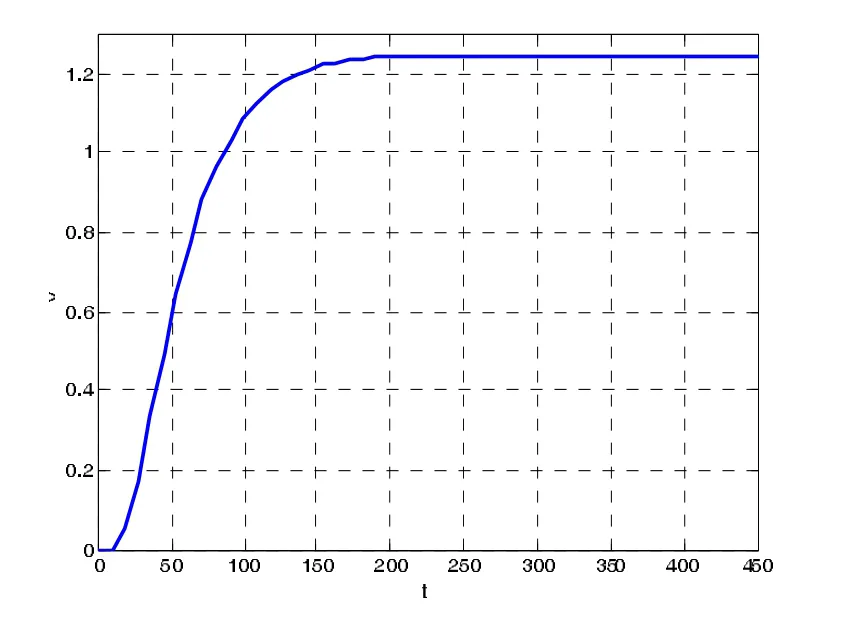
图1 单位阶跃响应曲线
主要教学内容: (1)在MATLAB/Simulink中搭建被控对象单回路控制系统; (2)采用稳定边界法整定调节器参数,并给出P、PI、PID三种调节器的控制曲线。
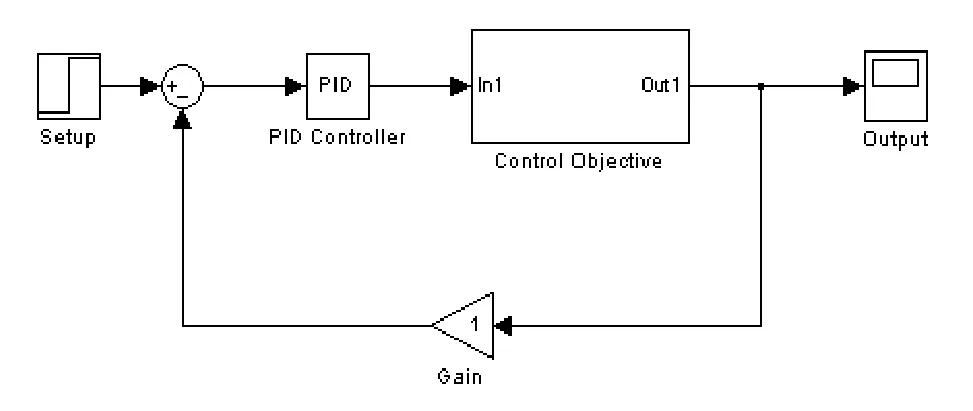
图2 简单控制系统仿真框图
临界比例度Pm和系统等幅振荡周期Tm由图3中读出,根据表1计算出调节规律整定参数。三种调节规律比例 (P)、比例-微分 (PI)、比例-微分-积分 (PID)的控制性能比较曲线从略。

图3 整定的等幅振荡曲线
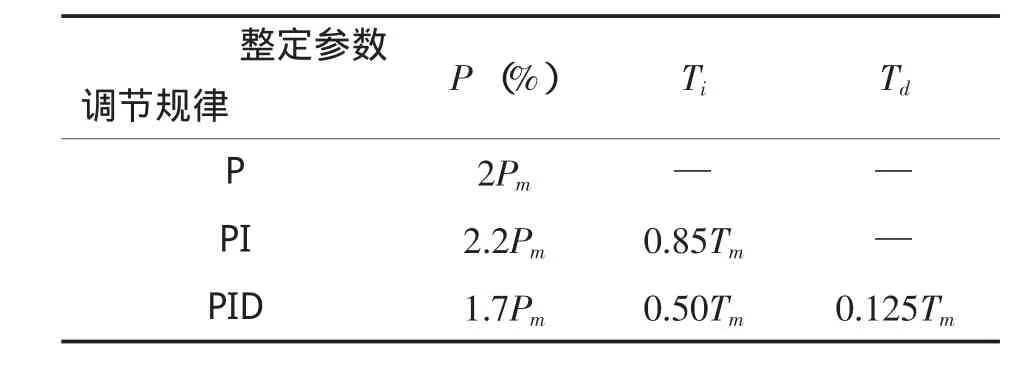
表1 稳定参数法整定参数计算表 [1]
该教学实例较为简单,其目的是通过课堂展示,使学生了解调节器特性的实验测试方法;掌握依据飞升特性曲线求取对象动态特性参数和调节器参数的方法;熟悉单回路控制系统的工程整定方法;在调节器参数整定的学习和演示中,进一步了解比例度与比例系数,微分、积分时间常数与微分、积分比例系数的关系,为后续理解掌握PID控制规律做铺垫。
2.2 串级控制系统
测得某工业过程构成如图所示的串级控制系统如图4所示,假设Gv(s)=1,Gm(s)=1,
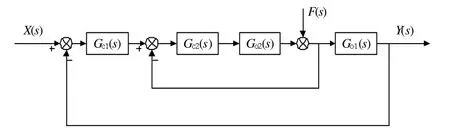
图4 串级系统结构框图
与2.1部分类似,采用两步法整定主、副控制器的PID参数。限于篇幅限制,系统仿真框图和整定的曲线从略。在相同条件下,串级控制系统与简单控制系统的比较结果如图5所示。
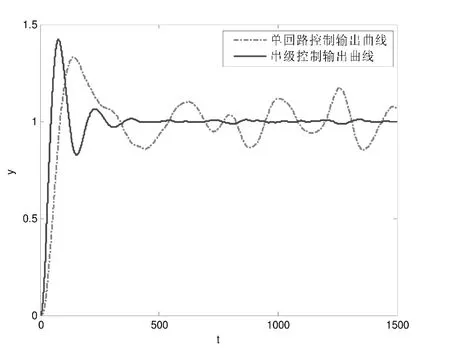
图5 串级控制系统与简单控制系统输出比较曲线
可以直观地看出,串级控制系统的控制性能较好。这是因为串级控制系统的副回路的存在能迅速克服进入副回路的干扰,从而有效地减少副回路干扰对主参数的影响,抗干扰能力增强。
本教学案例是在学生掌握简单控制系统的相关知识的基础上,向其演示串级控制系统组成原理,串级控制调节器参数的整定与投运方法;同时与单回路控制相比较,验证串级控制系统具有较好的控制性能,能改善系统的动态性能。
2.3 调节器参数变化对控制过程的影响

三种情况下的输出响应比较曲线,并简要分析该现象。
在2.1、2.2的基础上,设计了 “调节器参数变化对控制过程的影响”,教学内容 (1)(2)(3)(4)是针对同一被控对象采用同一种调节规律,在其他条件相同的情况下,向学生展示参数调整对于系统动态性能的影响,属于横向比较,在教学过程中,可以修改PID参数,现场演示调节器参数变化对控制过程的影响;教学内容 (5)是在针对同一被控对象分别采用P、PI、PID三种调节规律比较控制性能,属于纵向比较,比较曲线如图6所示。

图6 三种调节规律的比较曲线
由图6可以看出,曲线A对应P调节器;曲线B对应PI调节器;曲线C对应PID调节器。这是因为:PI、PID均含积分环节,均能消除静差,曲线A存在静差,故A对应P调节器;曲线B与A相比,由于引入积分环节虽然能消除静差,但是积分环节引起相位滞后,稳定性稍差,故应PI调节器;曲线C不但无静差,而且上升时间快、调节时间短,且微分环节对偏差变化趋势预估,有较好的控制效果,故对应PID调节器。
通过本教学案例的展示,学生进一步熟悉PID参数调节方法;并且通过PID参数调节横向比较(P、PI、PID),纵向比较 (固定几个参数,改变一个参数)的分析比较实验,进一步加深对P、I、D各个调节规律特点的认识,熟悉三个调节参数的变化对系统动态、稳态性能的影响;在教学中巩固和加深学生对理论知识的理解,逐步体会到验证、比较、分析系统控制性能的思想和技巧。
3 结语
本文结合 “过程控制”教学工作提出了课程计算机仿真教学案例,从模型到系统、从简单系统到复杂系统、从现象到原理,层层深入,分别针对单回路控制系统、串级系统设计、PID参数调整对控制性能的影响等知识点介绍了相关仿真实例的设计并给出了部分仿真结果。该教学方案的应用能使学生在课堂中感受到参数调整对控制效果的影响、直接观察到系统状态的变化趋势,对于增强学生对系统的认识、掌握参数调整规律大有裨益,可作为实验教学的补充。同时,笔者也注意到该方法存在现场感不强、与学生互动不足等缺陷。提高的措施:选取某一实际工业过程作为教学研究对象,如锅炉液位控制等,采用MFC编写人机交互界面、后台模型实时计算的模式研制虚拟仿真软件,将其融合在教学实践中,这将是后续可展开的工作。
[1]王再英,刘淮霞,陈毅静.过程控制系统与仪表[M].北京:机械工业出版社,2012.
[2]李国勇,何小刚,闫高伟.过程控制系统[M].北京:电子工业出版社,2013.
[3]唐玉玲.过程控制课程教学改革及实践[J].科技信息,2011,(19):10-22.
[4]薛定宇.控制系统计算机辅助设计:MATLAB语言与应用[M].北京:清华大学出版社,2012.
