TFT-LCD玻璃工业机器人自动包装技术研究与应用
2014-12-24李博
李 博
(东旭集团有限公司,河北 石家庄050021)
现在工业机器人主要用于汽车工业、机电工业、通用机械工业、建筑业、金属加工、铸造以及其它重型工业和轻工业部门。制造工业部门应用机器人的主要目的在于削减人员编制和提高产品质量。
液晶显示器因为其体积小、重量轻等诸多优点占据了显示领域的绝大部分,从电视电脑,到移动电话,液晶显示器遍布人们生活各个角落。 液晶显示器的大规模应用,使得市场对于液晶玻璃基板的需求剧增。国内企业抓住机遇,正在努力创造自己的光电显示品牌,一批液晶玻璃基板生产企业涌现,市场上绝大多数液晶玻璃基板被几大国外厂商生产垄断的现象正逐步被打破。
本文针对国内正在运行的第五代(简称G5)TFT-LCD 液晶玻璃基板生产线讨论工业机器人在液晶玻璃基板包装行业中的研究与应用。
G5 代TFT-LCD 液晶玻璃基板厚度仅为0.5mm, 而尺寸达到1300mm×1100mm,重量约为2.8 公斤,每30 秒就有一片玻璃基板下线,如此薄却尺寸大的玻璃基板在包装过程中不能出现破碎、划伤、吸附颗粒等现象, 而且在30 秒内需将玻璃基板码放整齐, 误差不超过2mm,玻璃基板之间还要铺间隔纸用以防止玻璃相互吸附,人工是无法完成如此高精度要求的工作流程,工业机器人的引入则解决了此难题。
1 相关工艺技术
TFT-LCD 液晶玻璃基板在生产过程中的传输方式分为两种。 一种是水平传送,玻璃基板放置在水平排布的尼龙滚轮上,通过滚轮滚动将玻璃进行传送,此传送方式的包装工艺也用水平操作机器人。 另一种是垂直传送,玻璃与水平面成80°角近乎直立方式传输,玻璃直立放置在直线排布的尼龙槽轮上,玻璃背部采用气浮条支撑,气浮条表面诸多微孔中吹出一定压力的气体形成气浮面保持玻璃直立且不接触气浮条。 此传送方式的包装工艺采用立式机器人。
前者成本低,但由于玻璃与滚轮直接接触,易产生滚轮印,对玻璃基板品质产生不良影响。后者成本高,但玻璃表面不与任何物体接触,可有效防止擦伤、划伤等问题产生,提高良品率,垂直传输方式以其优点在国内被广泛应用于G8.5 以下代次的TFT-LCD 液晶玻璃基板生产线中。
2 机器人自动包装研究与应用
2.1 工作原理与工艺流程
G5 代TFT-LCD 液晶玻璃基板生产线已经在国内建成多条,其共同点是成品包装区采用两台进口工业机器人对液晶玻璃基板进行包装。 两台机器人分别为取玻璃机器人和取纸机器人,两台机器人型号可以相同但分工不同。
取玻璃机器人负责将生产线末端的成品玻璃基板取下码放在A型架上。 机器人法兰位置加装机械支架,支架上安装有符合洁净等级要求的乳化橡胶吸盘, 采用吸盘吸附的方法将玻璃基板吸附牢固,然后取走码放到A 型架上,可实现玻璃基板的安全、整齐、快速包装。 取纸机器人负责将出纸机所提供的洁净间隔纸取出铺在每张成品玻璃之间,以防止玻璃基板直接相互接触造成吸附粘连及划伤。 取纸机器人法兰安装有取纸臂滑竿,滑竿上的夹爪可将间隔纸夹住取出,滑竿左右滑动可实现针对不同品质玻璃基板的间隔纸铺放。
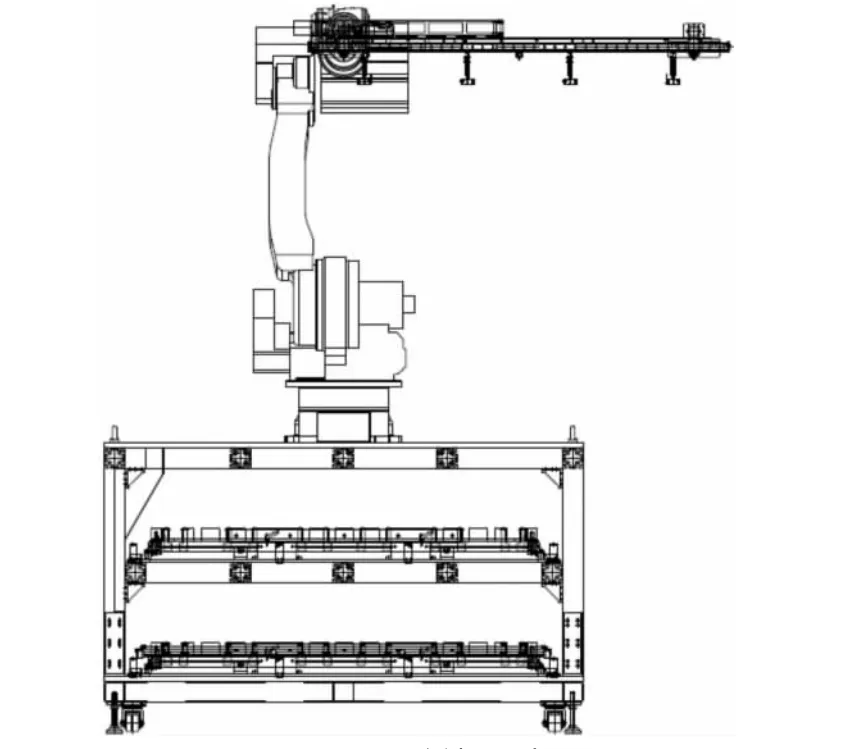
图1 取纸机器人
成品包装区机器人的包装动作流程是:根据玻璃基板品质判定结果,取纸机器人先将间隔纸铺在相应的A 型架上,取玻璃机器人再将玻璃基板放到该间隔纸上,两台机器人相互协调如此反复,在30 秒内将一张玻璃基板和间隔纸码放整齐。如遇取纸机器人取到多张间隔纸时,机器人将纸张取出扔掉,然后重新取纸。两台机器人有各自的工作范围,不能出现相互干涉或碰撞,因此,机器人的动作设定和工作范围必须经过严格的论证。
2.2 关键技术与解决方案
2.2.1 机器人包装的精确控制
垂直传输的G5 代TFT-LCD 液晶玻璃基板成品在A 型架上码方时要整齐划一,玻璃上下左右四个方向的错位误差不超过2mm,否则下游液晶面板企业在取用玻璃基板时将存在困难。机器人在无限重复性地码放玻璃时要每次都要精准,这就需要使用高精度的工业机器人和高精度伺服电机,采用闭环调节,优化工艺参数。
本文所述产线采用的机器人本体为垂直多关节形,具有6 个自由度, 有效载荷达到50Kg, 工作半径达到2m, 重复定位精度达到±0.07mm,机械振动小于4.9m/S2,电源容量为5KVA。 多关节自由度可实现复杂的动作;高定位精度可实现玻璃基板与间隔纸整齐码放。
2.2.2 机器人自动计数
液晶玻璃基板包装所用的A 型架一般可盛放500 张G5 代TFTLCD 液晶玻璃基板,装满后玻璃厚度约为350mm,机器人在放置玻璃基板时需要将A 型架上当前玻璃数量进行累加, 以使机器人每放一张玻璃基板后放置工作点后移0.7mm。 如果机器人计数错误,会使机器人机械手压死在A 型架上, 不仅损坏设备还会造成A 型架上的玻璃破碎,给生产带来巨大损失。
机器人在自动计数的同时玻璃基板传输设备也进行计数,每次卸载一张玻璃基板,机器人与传输设备之间进行计数比对,确认无误后机器人才能将玻璃放在A 型架上。 程序计数保证计数不出错。 另外,每个A 型架前采用激光测距传感器进行测量, 实时监测A 型架上玻璃厚度,出现计数误差过大时将发出警报,机器人自动停止放玻璃,避免取玻璃机器人机械手在放玻璃时与A 型架发生碰撞。

图2 机器人具有多关节自由度
3 工业机器人应用优点与缺点
3.1 工业机器人应用优点
3.1.1 工作模式丰富。 机器人具备示教模式、再现模式、远程模式。
3.1.2 结构模块化,便于维护。 机器人控制柜内各个板卡采用插接形式,易于更换维护。
3.1.3 动作灵活, 精度高。 具有6 个自由度, 重复定位精度达到±0.07mm。
3.1.4 设备安全性高。机器人与周边设备以及主电源设有多种互锁与保护措施,提高了设备安全性。
3.1.5 通讯可靠。 机器人与外界利用专用屏蔽电缆通过CC_LINK 高速网络进行通讯,传输速率最快达10Mbps,保证了信号的高速传输和抗干扰能力。
3.2 机器人应用缺点
3.2.1 初期投资较大。相比普通设备,工业机器人价格较高,导致初期投资较大。
3.2.2 对维护人员技术要求较高。工业机器人涉及机械、运动控制、伺服电机、电气控制、数字通讯技术等多方面学科,维护人员需具有相关专业知识以及学历,普通工人难以胜任。
4 结论
工业机器人虽然初期投资较高,但几乎是一次性投入,后期仅投入有限的维护费用, 不存在人员更迭及工资水平调整等人为因素影响,从长远来看成本并不算高。另外,通过招聘具有相关经验人员以及进行技能培训等方法解决维护人员专业知识欠缺等问题。文中所述机器人已经在生产线连续稳定运行多年,前述诸多优点也有所体现。 最近国内某大型代工企业生产线上也开始用工业机器人代替人工,由此可见,在生产线上使用工业机器人将是现代工业发展的趋势,推广机器人应用在各个行业产线将会大大提高生产效率、提高良品率、降低生产成本。 同时,也会推动我国工业整体自动化水平进一步提高。
[1]高鸿锦,蕈友梅.液晶与甲板显示技术[M].北京邮电大学出版社,2007.
[2]范志新.液晶器件工艺基础[M].北京邮电大学出版社,2000.
[3]梁新清.TFT-LCD 产业发展的机遇和挑战[J].电子玻璃技术,2010(1、2).
[4]上海埃蒙特自动化系统有限公司.工业机器人在中国液晶玻璃工业的应用[Z].2012.
[5]首钢莫托曼机器人有限公司.MOTOMAN-CR50 机器人使用说明书[Z].2010.
