平面尺寸链中单一组成环分析计算方法
2014-12-23赵远强李巧玲冉启洪樊玉芬黄勇向守春
赵远强, 李巧玲, 冉启洪, 樊玉芬, 黄勇, 向守春
(重庆长安汽车股份有限公司工艺技术部,重庆400020)
0 引言
汽车车身装焊偏差来源众多[1],设计时就需对装焊尺寸链进行计算,大部分都是采用一维分析的方法。在一些特殊情况下,应当引入二维计算以使理论分析与现实情况更为接近。文献[2]、[3]介绍了车身外覆盖件相关尺寸链的一维计算方法,同时也指出了一维尺寸链计算的局限性。平面尺寸链又叫二维尺寸链,因为其计算复杂,角度投影关系梳理困难,所以大多简化为一维问题进行近似替代。本文把单个组成环从整个尺寸链条中取出单独分析,只要明确了单个组成环的分析处理方法,便能把复杂的平面尺寸链问题化整为零,逐一解决。
1 尺寸链的概念与计算方法
尺寸链的计算按计算目的的不同分为正向计算和逆向计算,按计算的严格程度不同可以采用极限法计算和统计法计算[4]。正向计算是已知各部件的公差即组成环,计算总成件的公差即封闭环。逆向计算是在已制定好总成件的总公差范围后,对各组成零部件的公差进行分配,即已知封闭环,求所有或部分组成环[5]。极限法即是把公差简单相加,得到总成公差,如式(1);统计法即平方和开方法,计算如式(2):
式中:T0为总成公差;Ti为零部件公差。
2 平面尺寸链的计算
零部件按一定的约束关系装配成总成,在这一装配过程中,公差被传递并累积。零件尺寸偏差在公差带内的波动一般有一个确定的方向,即搭接面的法线方向。零件的装配约束关系决定了零件在某一方向上可以移动,这一零件的可移动方向是为了使零件能够上件和取件。而组成环的传递会受零件可移动方向的影响,公差会被放大或者缩小。被测要素的方向即封闭环的方向与零件可移动方向的关系也会影响测量结果。主要可分为四种工况。
2.1 零件可移动方向同时与组成环和封闭环平行
零件在一定的约束条件下,当公差变动的方向与零件可移动的方向平行时,装配约束对公差的传递没有影响。总成件被测尺寸的方向与零件可移动方向平行时,装配约束对封闭环也没有影响。如图1所示,左右两零件,左件固定,将右件装到左件上,右件可沿虚线剪头所示方向移动,偏差源来自于左件,如实线箭头所示,假设右件为理想状态,测量方向为虚线所示。
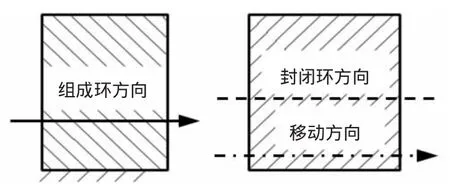
图1 组成环与封闭环同时平行于零件可移动方向示意图
组成环的公差不受装配关系的影响,如实地传递到封闭环,此时就是最普通的一维尺寸链问题,其计算式为T0=T1,公差传递系数为1。
2.2 零件可移动方向与组成环平行但与封闭环不平行
如图2所示,封闭环方向与移动方向的夹角为θ,组成环在移动方向上的传递在封闭环方向上需要进行投影转换,得到封闭环的结果。其计算式为:T0=T1cosθ,公差传递系数为cosθ。
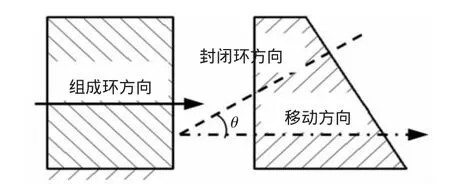
图2 零件可移动方向与组成环平行但与封闭环不平行示意图
2.3 零件可移动方向与封闭环平行但与组成环不平行
如图3所示,组成环方向与移动方向的夹角为θ,组成环在移动方向上的传递在封闭环方向上需要进行投影转换,得到封闭环的结果。其计算式为T0=T1/cosθ,公差传递系数为1/cosθ。
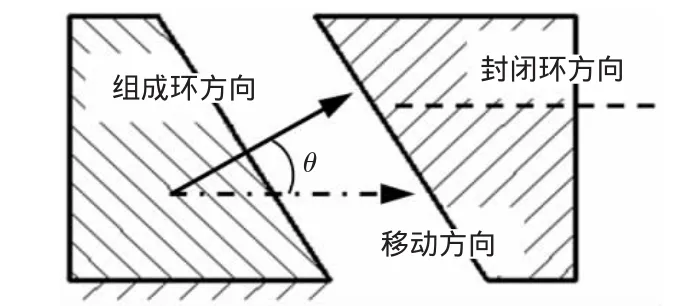
图3 零件可移动方向与封闭环平行但与组成环不平行示意图
2.4 零件可移动方向同时与封闭环和组成环不平行
如图4所示,组成环方向与移动方向的夹角为θ,移动方向与封闭环方向的夹角为σ。组成环的公差沿移动方向的传递系数为1/cosθ,移动方向投影到封闭环方向的传递系数为cosσ,所以经过两次传递之后,组成环到封闭环的计算式为T0=T1(1/cosθ)cosσ。
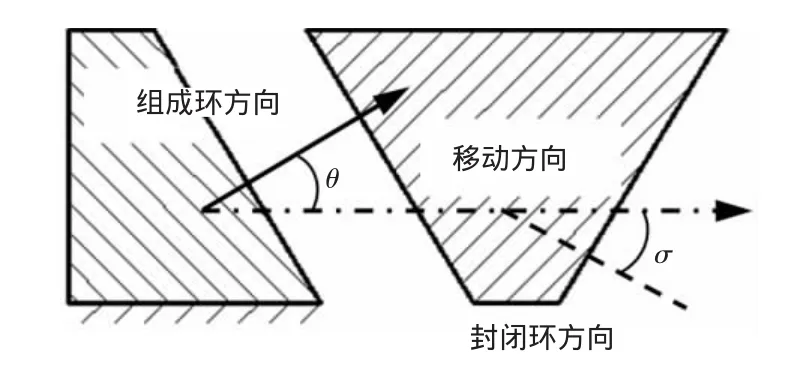
图4 零件可移动方向同时与封闭环和组成环不平行示意图
2.5 传递系数总结
每装配一个零件,尺寸链便会加长一环,测量方向与移动方向不平行,会缩小组成环对封闭环的贡献度。而偏差源方向与移动方向不平行,则会放大组成环对封闭环的贡献度。每一次装配的测量方向可以理解为下一次装配时的偏差源方向,如此以终为始、逐环分析地完成整个平面尺寸链的计算。因为夹角的放大作用,所以在设计零件的搭接面时,一定要避免公差源方向与零件移动方向之间出现较大夹角。零件搭接匹配关系与传递系数如表1所示。
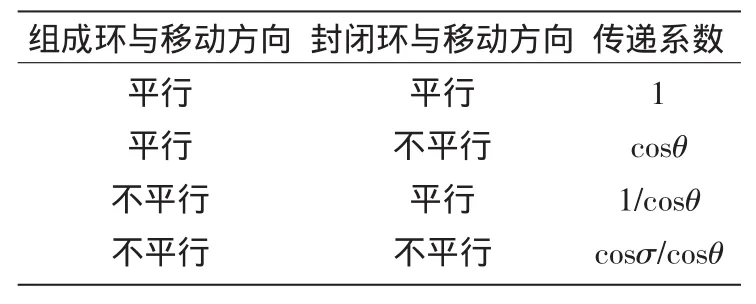
表1 装配关系对应传递系数表
3 结语
复杂的尺寸链一般由较多的链环搭接累积构成,本文对平面尺寸链中单一组成环的传递累积过程进行了分析计算,只要逐环清理零件的装配关系,按表1中对应的处理方式进行计算,便可较容易地完成复杂平面尺寸链的计算问题。
[1] 张无忧.焊接夹具影响车身制造精度[J].现代零部件,2010(5):28-31.
[2] 蓝先,黄朝辉.一维偏差分析在汽车整车设计中的应用及发展趋势[J].装备制造技术,2006(2):22-26.
[3] 王金良.车身外观间隙、面差及其公差验证[J].现代零部件,2010(5):37-39.
[4] 张政寿.二维尺寸链理论及计算[M].北京:国防工业出版社,1988:4-5.
[5] 俞立钧.机械精度设计基础及应用[M].上海:上海大学出版社.2006:312-314.
