行走式臂架型回转起重机回转时起重能力变化规律的研究
2014-12-25任冬青
任冬青
(齐齐哈尔轨道交通装备有限责任公司 大连研发中心,辽宁 大连116052)
0 引言
行走式臂架型回转起重机种类繁多,有汽车起重机、轮胎起重机、履带起重机、门座起重机、铁路起重机等,在矿山、电力、港口、钢铁、化工、铁路救援等各行业使用广泛,在国民经济建设中发挥着重要作用。本文主要分析行走式臂架型回转起重机在下车固定、上车幅度和臂长一定,做回转动作时,起重机吊重能力的变化规律。
1 臂架型回转起重机计算工况及数学模型建立、分析
1.1 两个模型
假定行走式臂架型回转起重机在坚实、水平支承面上,下车固定,打支腿或不打支腿时都有矩形倾覆线,上车吊臂幅度和臂长一定,围绕回转中心做360°回转。上车重力为G1,重心落在起重机横向平面上,距离起重机回转中心距离为c;下车重力为G2,重心在回转中心线上;吊臂工作幅度为R,吊重物为P,模型如图1。
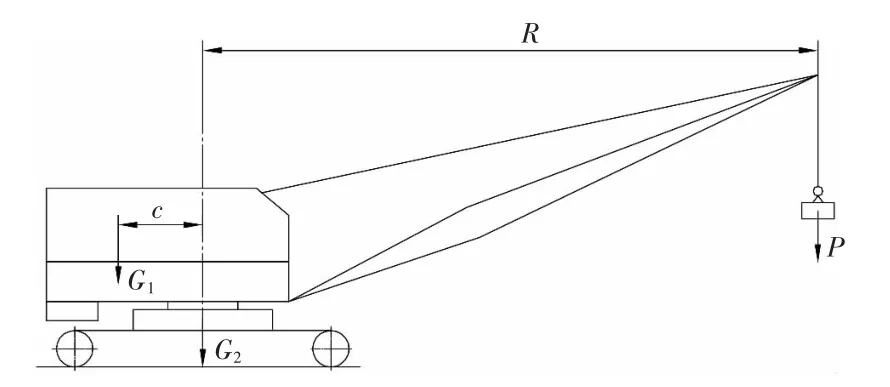
图1 模型
起重机矩形倾覆线长为2a,宽为2b。由于起重机下车相对横向平面和纵向平面对称,所以可以只分析起重机上车在[0,π/2]回转角度内的吊重能力,[0,2π]角度内吊重能力可由起重机在[0,π/2]内的吊重能力关于横向与纵向平面对称得出。假定上车回转角度为φ,模型如图2。
围绕AC倾覆线列力矩平衡方程:
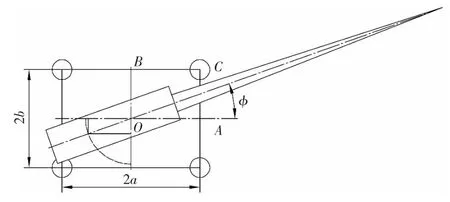
图2 模型
P·(R·cosφ-a)=G1·(c·cosφ+a)+G2·a,0≤φ≤arccos(a/R)。围绕BC倾覆线列力矩平衡方程:
P·(R·sinφ-b)=G1·(c·sinφ+b)+G2·b,arcsin(b/R)≤φ≤π/2。
1.2 起重机围绕AC倾覆线的起重能力分析
1.3 起重机围绕BC倾覆线的起重能力分析
arcsin(b/R)<φ≤π/2 时,P(φ)=[G1·(c·sinφ+b)+G2·b]/(R·sinφ-b),,P(φ)在 arcsin(b/R)<φ≤π/2 范围内单调减。,为最小值;φ→arcsin(b/R)时,P(φ)为无穷大。
1.4 起重机AC、BC倾覆线不倾覆的吊重能力
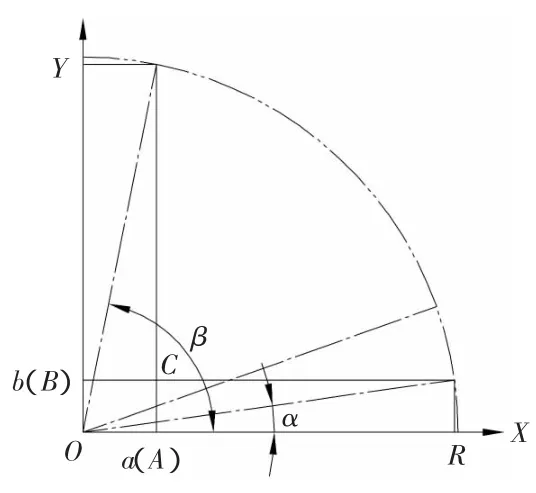
令 α=arcsin(b/R),β=arccos(b/R),α和β角位置如图3所示。
如图3可知,0<α<β<π/2。起重机对AC及BC倾覆线不倾覆的吊重能力P(φ)曲线如图4。
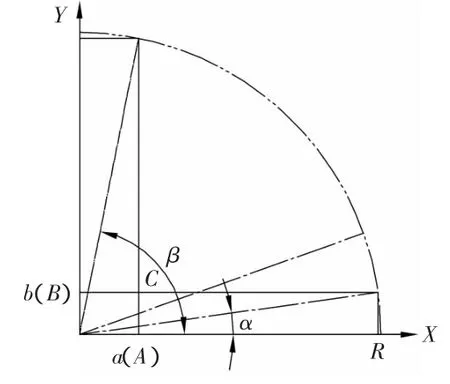
图3
1.5 起重能力最大位置
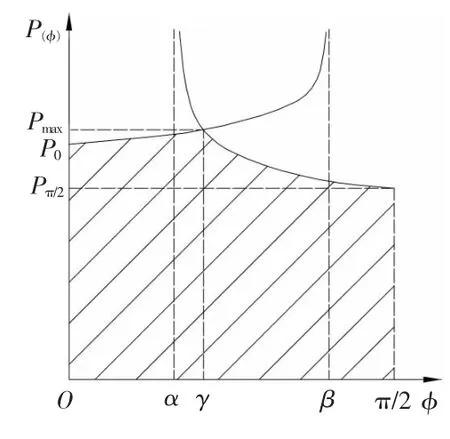
起重机吊重能力需同时满足围绕AC和BC倾覆线不倾翻,所以起重机在[0,π/2]角度回转,吊重能力如图4阴影部分。
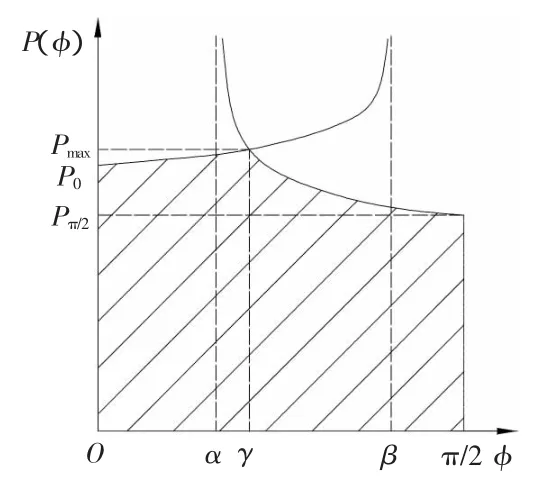
图4
如图4可知,在[0,π/2]范围内,必存在一位置γ,起重机吊重P取得最大值。关于AC和BC倾覆线列力矩方程:
P·(R·cosγ-a)=G1·(c·cosγ+a)+G2·a,
P·(R·sinγ-b)=G1·(c·sinγ+b)+G2·b。
这是一个关于P和γ的二元方程组。
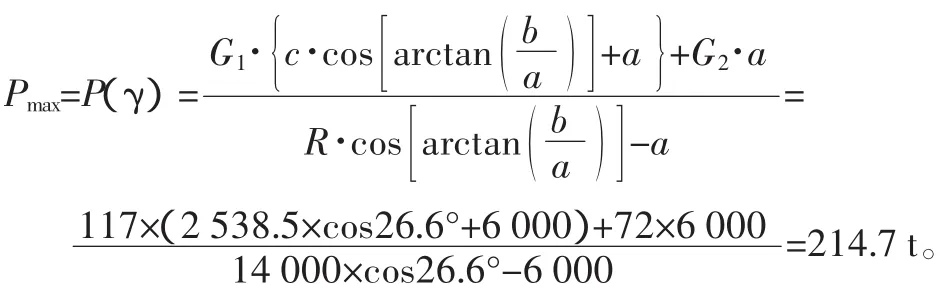
求解方程组,得γ=arctan(b/a),带入方程组中任一方程中,可求得最大起重量
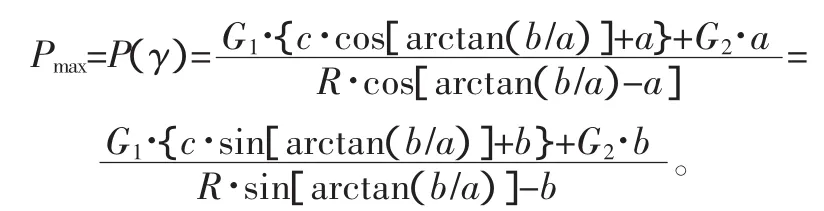
由此可知,起重机在[0,π/2]范围内起重能力最大的位置是上车中心线经过AC、BC倾覆线交点的位置。
2 臂架型双回转起重机计算工况及数学模型建立、分析
2.1 双回转结构
在一些特殊的起重机中,如铁路起重机,吊重时,为了不影响邻线通车,开发了双回转结构,即上车由前部回转和后部回转两部分组成。顺轨吊重时,前部回转部分与轨道成一定角度工作时,后部回转部分可保持顺轨方向不变,从而不影响后面邻线通车。
同上车单回转起重机相同,假定行走式臂架型双回转起重机在坚实、水平支承面上,下车固定,打支腿或不打支腿时都有矩形倾覆线。上车前部回转部分吊臂幅度和臂长一定,围绕回转中心旋转,与轨道成一定角度。上车后部回转部分固定。上车后部回转部分重力为G1,重心落在起重机横向平面上,距离起重机回转中心距离为c;上车前部回转部分重力为G3,重心落在起重机横向平面上,距离回转中心距离为d;下车重力为G2,重心在回转中心线上;吊臂工作幅度为R,吊物重P,模型如图5。
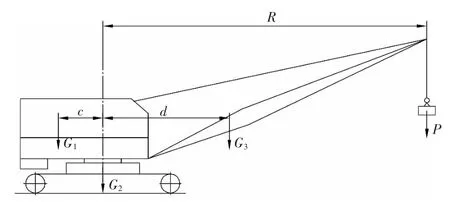
图5 模型
起重机矩形倾覆线长为2a,宽为2b。根据工况,分析上车后部回转部分固定,上车前部回转部分在[0,π/2]回转角度内的吊重能力。假定上车回转角度为φ,模型如图6。
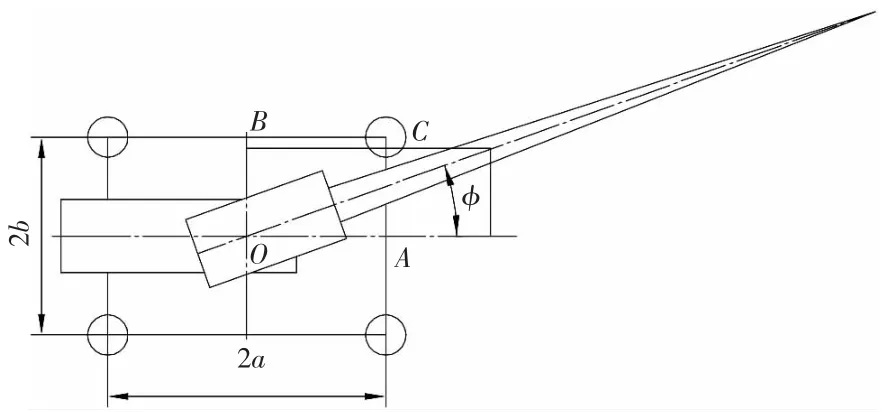
图6 模型
围绕AC倾覆线列力矩平衡方程:
P·(R·cosφ-a)=G1·(c+a)+G2·a-G3·(d·cosφ-a),0≤φ 围绕BC倾覆线列力矩平衡方程: P·(R·sinφ-b)=G1·b+G2·b-G3·(d·sinφ-b),arcsin(b/R)<φ≤π/2。 P(0)=[G1·(c+a)+G2·a-G3·(d-a)]/(R-a),为最小值;φ→arccos(a/R),P(φ)为无穷大。 arcsin(b/R)<φ≤π/2 时,P(φ)=[(G1+G2+G3)·b-G3·d sinφ]/(R·sinφ-b),,P(φ)在arcsin(b/R)<φ≤π/2范围内单调减。 P(π/2)=[(G1+G2+G3)·b-G3·d]/(R-b),为最小值;φ→arcsin(b/R)时,P(φ)为无穷大。 令 α=arcsin(b/R),β=arccos(a/R),α 和 β角位置如图7所示。 如图7可知,0<α<β<π/2位置。起重机对AC及BC倾覆线不倾覆的吊重能力P(φ)曲线如图8。 图7 α和β角位置 图8 吊重能力曲线 起重机吊重能力需同时满足围绕AC和BC倾覆线不倾翻,所以起重机在[0,π/2]角度回转,吊重能力如图8阴影部分。如图可知,在[0,π/2]范围内,必存在一位置γ,起重机吊重能力P取得最大值。关于AC和BC倾覆线列力矩方程: P·(R·cosγ-a)=G1·(c+a)+G2·a-G3·(d·cosγ-a),P·(R·sinγ-b)=G1·b+G2·b-G3·(d·sinγ-b)。 这是一个关于P和γ的二元方程组。求解方程组可得起重机上车回转部分在[0,π/2]角度回转时最大起重量P和相应转角γ的值。 某型号双回转铁路起重机工作时支腿跨距为6 m×12 m,上车后部回转部分重62t,重心距回转中心为11000mm,上车前部回转部分重55 t,重心距回转中心为7000 mm,下车重72 t,幅度14000 mm,求解起重机在给定幅度和支腿跨距下,上车做全回转及双回转时的最大起重量及吊臂对应所在的位置。 支腿跨距6 m×12 m,所以 a=6000 mm,b=3000 mm,幅度 R=14000 mm,下车重量G2=72 t。 1)起重机上车全回转时,前部回转部分和后部回转部分一起围绕回转中心线回转。 上车重量G1=55 t+92 t=117 t,重心位置为 起重机在[0,π/2]范围内起重能力最大的位置是上车中心线经过倾覆线交点的位置。吊臂中心线与轨道夹角为γ=arctan(b/a)=arctan(3000/6000)=26.6°。 此时起重机的最大起重量为 2)起重机上车只有前部回转部分回转时,前部回转部分围绕回转中心线回转,后部回转部分不动。 起重机后部回转部分重量G1=62 t,c=11000 mm; 起重机前部回转部分重量G3=55 t,d=7000 mm。 代入力矩平衡方程: P·(R·cosγ-a)=G1·(c+a)+G2·a-G3·(d·cosγ-a),P·(R·sinγ-b)=G1·b+G2·b-G3·(d·sinγ-b),得: P·(14000·cosγ-6000)=62×(11000+6000)+72×6000-55×(7000×cosγ-6000),P·(14000·sinγ-3000)=62×3000+72×3000-55×(7000·sinγ-3000)。 解方程得:P=206.7 t,γ=21.2°。 所以上车后部回转部分固定,吊臂中心线与轨道夹角成21.2°时,起重机可起吊最大起重量206.7 t。 1)行走式臂架型回转起重机下车固定,有矩形倾覆线,有固定的幅度和臂长,上车围绕回转中心线旋转,在回转角度[0,π/2]范围内,起重机吊重能力变化规律是先增大后减少。回转角度在0和π/2时,吊重能力为两个极小值;[0,π/2]范围内存在一个吊重能力极大值,在上车中心线经过起重机倾覆线的交点位置。 2)行走式臂架型回转起重机有矩形支腿或倾覆线,上车做360°全回转时,只需按臂架垂直于最长倾覆边位置设计起重机吊重能力,校核起重机的稳定性,或者做起重机在各幅度下起重量的标定。 3)由行走式臂架型回转起重机在[0,π/2]角度内回转的吊重能力曲线可知,[0,π/2]区域里任意角度范围的吊重能力曲线都是“上凸”的,回转角度的两个边界位置一定是起重机在这个回转角度范围内吊重能力的两个极小值,所以只需要比较两个边界位置的吊重能力,选最小值所在位置来设计起重机吊重能力,校核起重机的稳定性,或者做起重机在各幅度下起重量的标定。例如,起重机在[0,π/6]回转,只需要计算0和 π/6位置的吊重能力,选吊重能力小的位置来校核起重机的稳定性,或者标定起重机在[0,π/6]范围内回转时各幅度下的起重量。 4)行走式臂架型双回转起重机下车固定,有矩形倾覆线,有固定的幅度和臂长,上车后部回转部分固定,前部回转部分围绕回转中心线旋转,在回转角度[0,π/2]范围内,起重机吊重能力变化规律是先增大后减少。回转角度在0和 π/2时,吊重能力为两个极小值;[0,π/2]范围内存在一个吊重能力极大值。最大起重量及上车前部回转部分所在位置可由起重机对矩形倾覆线的两条边列力矩平衡方程求得。 5)了解起重机全回转或双回转时吊重能力的变化规律,实际设计和计算中还需要考虑起重机工作的实际情况,结合考虑车体重心关于车体中心线的偏斜、车体的倾斜、工作风载等,综合考虑,确定合理的起重机技术参数,以保证在安全的情况下,得到最合理的吊重性能。 [1] GB/T3811-2008 起重机设计规范[S]. [2] 王金诺,张质文,程文明.起重机设计手册[M].北京:中国铁道出版社,2013.2.2 起重机围绕AC倾覆线的起重能力分析
2.3 起重机围绕BC倾覆线的起重能力分析
2.4 起重机对AC、BC倾覆线不倾覆的吊重能力
2.5 起重机吊重
3 实例计算

4 结论
