嵌入式系统中的快速光条中心提取算法
2014-12-23范建华杨秋翔安雁艳冯欣悦
范建华,杨秋翔,安雁艳,冯欣悦,杨 剑
(中北大学 计算机与控制工程学院,山西 太原030051)
0 引 言
线结构光测量技术是三维形貌测量技术中速度较快、精度较高、应用较广的一种测量技术。线结构光测量技术通过激光器发射一条光线到待测物体表面,由于物体表面的深度特性,产生了变形,通过电荷藕合器件图像传感器(charge coupled device,CCD)摄像机获取变形的光条图像,最后通过解调光条变形图像还原出被测物体的三维形貌。解调光条变形图像基本且关键的一步就是提取光条中心[1],光条中心的提取精度和速度对整个三维形貌测量系统的性能有着很大的影响。本文将嵌入式系统技术和三维形貌测量技术相结合,研究基于高级精简指令集机器 (advanced RISC machine,ARM9)的嵌入式三维测量系统中的光条中心提取算法。由于嵌入式系统的运算和存储能力有限,如何实现高效的提取算法已经成为一个亟待解决的难题。同时,在条纹中心提取时,由于CCD 内部产生的噪声,加上测量环境的复杂性及被测物体的多样性,如被测物体的形貌结构复杂、材质不一、颜色变化等等,光条常会发生多种变化,使得最终得到的光条图像受到很多干扰,这给光条纹中心提取方法的设计带来很大的困难[2,3],针对上述问题,本文提出了一种嵌入式系统中的条纹中心提取算法,实现了条纹中心的快速、精确提取。
1 研究现状分析
常见的提取算法有极值法、阈值法、几何中心法、重心法、曲线拟合法等。极值法是把灰度值最大的点作为光条中心,该算法原理简单、运算速度快,但是当激光条纹光强较大时会存在多个极大值的现象,提取出的中心线不是单像素的。阈值法是以阈值大于等于一定值的左右2个像素的位置中心作为光条中心,提取速度快,但是精度较差,且噪声较多使信号失真时效果更差。几何中心法首先求出光条的2个边界,在每个截面上,用2个边界位置的几何中心点作为光条中心。这种方法简单,提取速度快,但是必须首先获取精确的边界位置才能保证最终结果的正确性,对噪声比较敏感[4]。高斯拟合法是利用光条纹的灰度值在法线方向上近似服从高斯分布,在其法线方向上拟合出高斯曲线,并把极值的位置作为光条中心,该方法不适合窄带光条中心的提取,鲁棒性不佳[5,6]。重心法是对像素位置进行灰度加权而求出光条中心位置,没有考虑线条的方向性,因此在光条曲线的曲率变化较大处存在错误判断[7,8]。针对这个问题,国内外许多学者提出了相应的解决方案。Steger提出了利用Hessian矩阵的性质来求取光条的法线方向,后来一些学者又在此基础上作了改进,该方法精度能达到亚像素级,稳定性好,但是计算量大,影响了测量的实时性[9,10]。熊会元等提出了方向模板法,该方法需要图像与多个方向模板进行相关运算,虽然抗噪声能力比较好,但运算量较大,数据存储量也较大,且运算比较复杂,提取精度不能达到亚像素级[11,12]。本文中提出了用微分中值定理求条纹的近似法线,在法线方向上用灰度重心法求条纹中心的方法,精度达到亚像素级,能实现条纹中心的实时快速提取。
2 光条中心的提取
2.1 图像预处理
由于测量环境的光照不稳定、物体本身的反射光以及CCD 的成像噪声和图像采集卡的采样和量化误差等影响,使获得的光条变形图像中带有大量的噪声。所以进行光条中心提取前首先应该对图像进行噪声处理,滤掉噪声信号,保留有用的光条信号。根据上述原则,本文中采用中值滤波。中值滤波的工作步骤如下:
(1)选取二维奇数采样窗口,让其在获取的光条变形图像上滑动,使采样窗口的中心与光条图像中某一像素位置重合。
(2)将窗口中的像素按照灰度值从小到大进行排序,生成单调的数据序列。
(3)选出序列中的中间值,将其赋值给对应模板中心位置的像素。
中值滤波是一种非线性平滑技术。它可以克服线性滤波器带来的图像细节模糊问题,既能很好地去除孤点噪声,又能保持图像的边缘特性。而且它对滤除脉冲干扰和图像扫描噪声非常有效,同时它运算简单,易于实现[13]。
光条变形图像经过滤波之后,对其进行阈值分割。阈值分割是一种基于区域的图像分割技术,尤其适用于目标和背景的灰度级相差较大的图像。它通过设定不同的阈值,把图像像素点分为若干类,以便根据具体的情况对不同类别做出相应的处理,这样可以极大地压缩数据量,而且也在很大程度上简化了分析步骤。阈值分割是一种最常用的图像分割方法,它已经被广泛地应用于很多领域。阈值分割有多种不同的分割方法,本文采用最大类间方差法[14]来获得合适的阈值th,该方法使得图像中目标与背景的错分概率最小。
设原始图像为I(i,j),则分割后的图像If如下式

式中:I(i,j)—— (i,j)处像素的灰度值。
在本文中,采集到的光条变形图像的目标和背景占据着不同灰度级范围,采用阈值分割法能很好地体现出该方法计算简单、运算效率高、运行速度快的优点。
2.2 光条中心的提取
经过图像预处理之后,就可以进行光条中心的提取了。首先用阈值法粗略提取出光条的中心点。将这些离散的中心点通过插值法构造成光滑的曲线,这样就得到了粗提取的光条中心线。同时把这些粗提取的中心点放入集合S(x,y)中,然后从集合中依次取出中心点,根据微分中值定理,求出每一点的近似法线。
微分中值定理:如果函数f(x)在区间 [a,b]内连续,在区间 (a,b)内可导,那么在 (a,b)内至少有一点c (a<c<b),使得式2成立

即点 (c,f(c))的切线与f(x)在x=a,x=b处对应的两点 ((a,f(a))和 (b,f(b))的连线平行。则可以求得该点的切线斜率k

求出斜率k之后就可以求出该点的法线。如图1所示。
对图像f,求出粗提取的光条中心线后用微分中值定理近似求出光条纹的法线方向。对于条纹中心线上的一点,它的图像坐标为 (x0,y0),与它相邻的上下两点分别为(x1,y1)(x2,y2),它的切线方向的斜率为k1,它的法线的斜率为k,根据微分中值定理可以求得k1和k的值
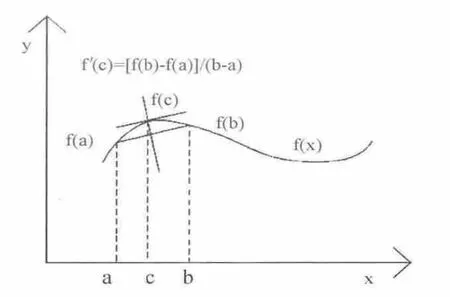
图1 微分中值定理
则 (x0,y0)点的法线为

粗提取的条纹法线如图2所示。从图中可以看出用中值定理求出的法线方向和曲线的法线方向非常接近,可以近似把该方向看成是曲线的法线方向,因此对点 (x,y)∈S(x,y),可以沿着该方向求取光条中心。对于集合S中的一点 (x0,y0),在其法线方向上取出图像中的目标点,将这些点依次放入集合Tx0,y0(x,y)中,且令

式中:f(x,y)—— (x,y)对应的灰度值。然后对集合T 中的点用灰度重心法求取光条中心。
图2 光条的法线方向

上式中n为集合Tx0,y0,)中点的个数。点 (,)即为光条中心点。依次取出集合S中的点,用灰度重心法求取中心点,最终得到光条中心线。
3 实验结果
根据上文提出的方法进行了实验。实验中采用的摄像机为WAT-902B,图像分辨率 (dpi)为570TVL,激光光源为650nm。CPU 为Intel(R)Core(TM)2Duo E7500,使 用 TX-2440A ARM9 嵌 入 式 开 发 板, 资 源 来 自OPENCV2.0嵌入式视觉库,开发库为EMCV2.3库,操作系统为Linux2.6。在上述开发环境中,对图3中获取的原始图像进行处理。实验实现了重心法、方向模板法、改进的方向模板法以及本文中提出的方法。图4所示为本文中提出的方法的提取结果,图5为重心法的提取结果,图6为方向模板法的提取结果,图7为改进的方向模板法的提取结果。通过对这几幅图像进行对比可以看到,本文中提出的方法能更好地提取出光条中心线。表1为上述几种光条中心提取方法的数据统计,从表中可以看到重心法在136行与137行、144行与145行之间出现了断线。方向模板法在141行与142行之间出现了断线,而本文提出的方法则没有出现这个问题,且提取结果达到了亚像素级。而且与方向模板法和改进的方向模板法相比,本文中提出的方法提取速度明显较快,提取时间为0.187s,达到了实时提取的目标。

图3 原始图像

图4 本文方法

图5 重心法

图6 方向模板法

图7 改进的方向模板
4 结束语
本文在嵌入式系统资源有限的条件下,针对光条中心提取的问题,提出了用微分中值定理近似求出光条法线方向,在法线方向上用灰度重心法来提取光条中心的方法。该方法省去了计算海赛矩阵以确定法线方向的所需的时空资源,缩短了提取光条中心的时间。与重心法相比,该方法克服了重心法不能处理光条纹方向的不足。同时该方法克服了方向模板法只能获得光条纹有限近似方向的不足。经过实验证明该方法能实现光条的实时、快速提取,并能达到亚像素级,可以满足嵌入式三维形貌测量系统的要求。
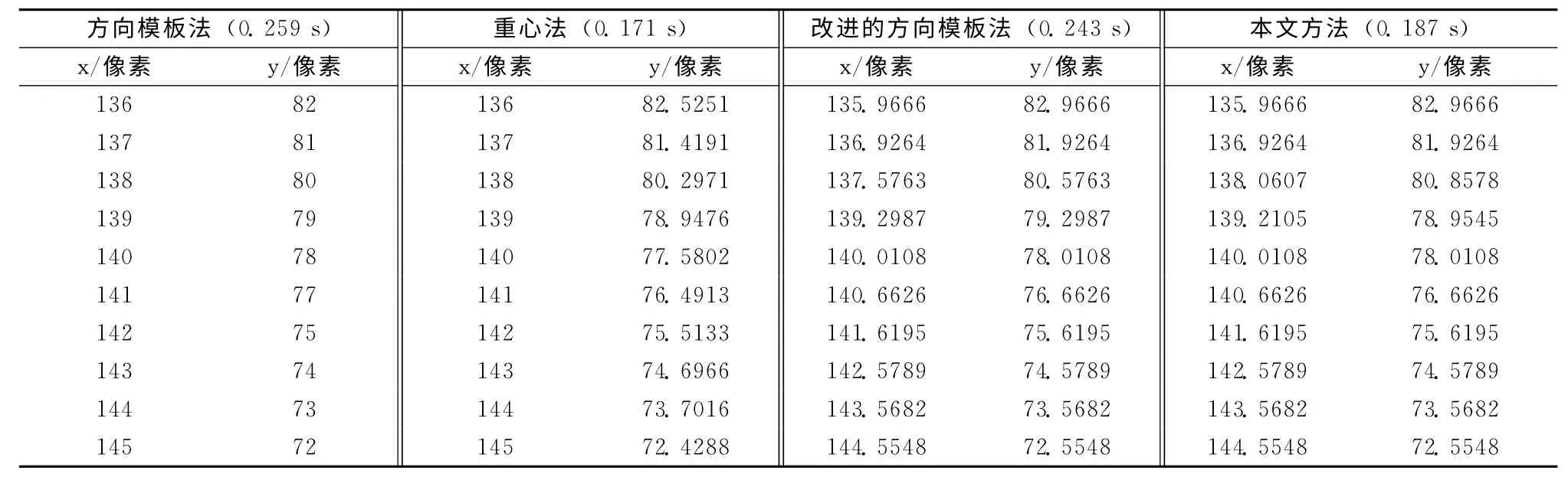
表1 几种光条中心提取方法的数据统计
[1]ZHANG Yuwei.Research on three-dimensional topography measurement using structured light[D].Harbin:Harbin Engineering University,2012 (in Chinese).[张雨薇.基于结构光的物体三维形貌测量[D].哈尔滨:哈尔滨工程大学,2012.]
[2]YANG Wei.Research on method for extracting center of structured light stripes[D].Harbin:Harbin Institute of Technology,2012 (in Chinese). [杨尉.结构光光条中心提取方法的研究 [D].哈尔滨:哈尔滨工业大学,2012.]
[3]ZHOU Fuqiang,CHEN Qiang,ZHANG Guangjun.Composite image processing for center extraction of structured light stripe[J].Journal of Optoelectronics-Laser,2008,19 (11):1534-1537 (in Chinese).[周富强,陈强,张广军.结构光光条提取的混合图像处理方法 [J].光电子-激光,2008,19(11):1534-1537.]
[4]XU Jingzhu.Research on methods and evaluation of stripe center extraction in structured light 3D measurement[D].Nanjing:Nanjing University,2012 (in Chinese).[徐静珠.结构光三维测量中光条中心提取方法及其评价的研究 [D].南京:南京大学,2012.]
[5]GAO Shiyi,YANG Kaizhen.Research on central position extraction of laser strip based on varid-boundary Gaussian fitting[J].Chinese Journal of Scientific Instrument,2011,32 (5):1132-1137 (in Chinese).[高世一,杨凯珍.变边限高斯拟合提取激光条纹中心线方法的研究 [J].仪器仪表学报,2011,32 (5):1132-1137.]
[6]SUN Panqing,YANG Yongyue,HE Liangliang.An improved Gaussian fitting method used in light-trap center acqui-ring [J].Electronic Design Engineering,2012,13 (20):179-185 (in Chinese).[孙盼庆,杨永跃,何亮亮.一种改进的高斯拟合法在光带中心提取中的应用 [J].电子设计工程,2012,13 (20):179-185.]
[7]LI Zhongwei,WANG Congjun,SHI Yusheng.An algorithm for detecting center of structured light stripe combining gradient sharpening with barycenter method [J].Journal of Image and Graphics,2008,13 (1):64-68 (in Chinese). [李中伟,王从军,史玉升.一种结合梯度锐化和重心法的光条中心提取算法 [J].中国图象图形学报,2008,13 (1):64-68.]
[8]WU Jiayong,WANG Pingjiang,CHEN Jihong,et al.Method of linear structured light sub-pixel center position extracting based on gradient barycenter[J].Journal of Image and Graphics,2009,14(7):1355-1360(in Chinese).[吴家勇,王平江,陈吉红,等.基于梯度重心法的线结构光中心亚像素提取方 [J].中国图象图形学报,2009,14 (7):1355-1360.]
[9]Steger C.An unbiased detector of curvilinear structures [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1998,20 (2):113-125.
[10]JIANG Jie,DENG Jueqiong,ZHANG Guangjun,et al.Real-time implementation of light stripe center extraction[J].Optical Technique,2008,34 (2):170-177 (in Chinese).[江洁,邓珏琼,张广军,等.光条纹中心的实时快速提取 [J].光学技术,2008,34 (2):170-177.]
[11]XIONG Huiyuan,ZONG Zhijian,GAO Qun,et al.Precise method for extracting center of structured light stripe [J].Computer Engineering and Applications,2009,45 (10):235-237 (in Chinese). [熊会元,宗志坚,高群,等.精确提取线结构光条纹中心方法 [J].计算机工程与应用,2009,45 (10):235-237.]
[12]WU Qingyang,SU Xianyu,LI Jingzhen,et al.A new method for extracting the center-line of line structure lightstripe[J].Journal of Sichuan University,2007,39 (4):151-155 (in Chinese). [吴庆阳,苏显渝,李景镇,等.一种新的线结构光光带中心提取算法 [J].四川大学学报,2007,39 (4):151-155.]
[13]ZHAO Gaochang,ZHANG Lei,WU Fengbo.Application of improved median filtering algorithm to image de-noising [J].Journal of Applied Optics,2011,32 (4):121-126 (in Chinese).[赵高长,张磊,武风波.改进的中值滤波算法在图像去噪中的应用 [J].应用光学,2011,32 (4):121-126.]
[14]LIU Dongju.The research of image segmentation based on thresholds[D].Beijing:Beijing Jiaotong University,2009(in Chinese). [刘冬菊.基于阈值的图像分割算法的研究[D].北京:北京交通大学,2009.]