斯特林与脉管制冷机控制系统的研究进展
2014-12-22甘智华邱利民
侯 森 王 波 甘智华 邱利民
(1浙江大学制冷与低温研究所 杭州 310027)
(2中国电子科技集团第十六研究所 合肥 230043)
1 引言
在现代科学技术中,许多仪器和设备的运行和发展离不开低温制冷技术,例如红外器件、低温电子器件、低温冷凝真空泵、超导磁体和超导磁共振成像仪等都需要符合要求的低温制冷机来提供冷却条件,斯特林和脉管制冷机是小型低温制冷机中应用最广泛的两种制冷机。
斯特林制冷机正常工作时,压缩机活塞在线性电机的驱动作用下往复运动,膨胀机排出器与压缩机活塞之间的运动保持一定的相位差,以完成工质气体的两个等温压缩和膨胀过程与两个等容回热过程,使得制冷机冷端在设定低温下提供一定的制冷量,斯特林制冷机按结构可分为整体式和分置式两种。与斯特林制冷机相比,脉管制冷机尤其是采用线性驱动技术的斯特林型脉管制冷机,由于其低温部分没有运动部件,因而具有结构简单、尺寸紧凑、可靠性高和运行寿命长等优点,逐渐被广泛应用。随着对高温超导设备和红外探测器等对更低制冷温度的要求,两级或多级结构的脉管制冷机得到了极大的发展。
一个完整的斯特林或脉管制冷机系统包括线性压缩机、冷头和控制器3个部分,控制器部分是驱动维持制冷机进行正常工作的关键组件。通常,制冷机冷头部分设计完成后,会有一个最佳的运行频率,当驱动电路提供与这个最佳运行频率同频的驱动电压波时,制冷机工作的效率最高,在此共振频率下,对输入电压的调节能够更有效地转换成对活塞行程的调节,进而影响气体压力波的大小,最终影响了冷端的制冷温度。控制器主要就是通过调节压缩机的输入电压、频率和相位差,来改变压缩机的行程,从而控制冷头的温度,控制系统的目的是使得制冷机能够快速降温,并在设定温度点处保持一定的温度稳定精度。已经有较多的低温制冷机系统实验研究表明主要是控制器部分而不是压缩机或者冷头部分影响了低温制冷机系统的可靠性。
目前常用的斯特林与脉管制冷机控制器主要包括以下模块,如图 1、2 所示[1-2]:
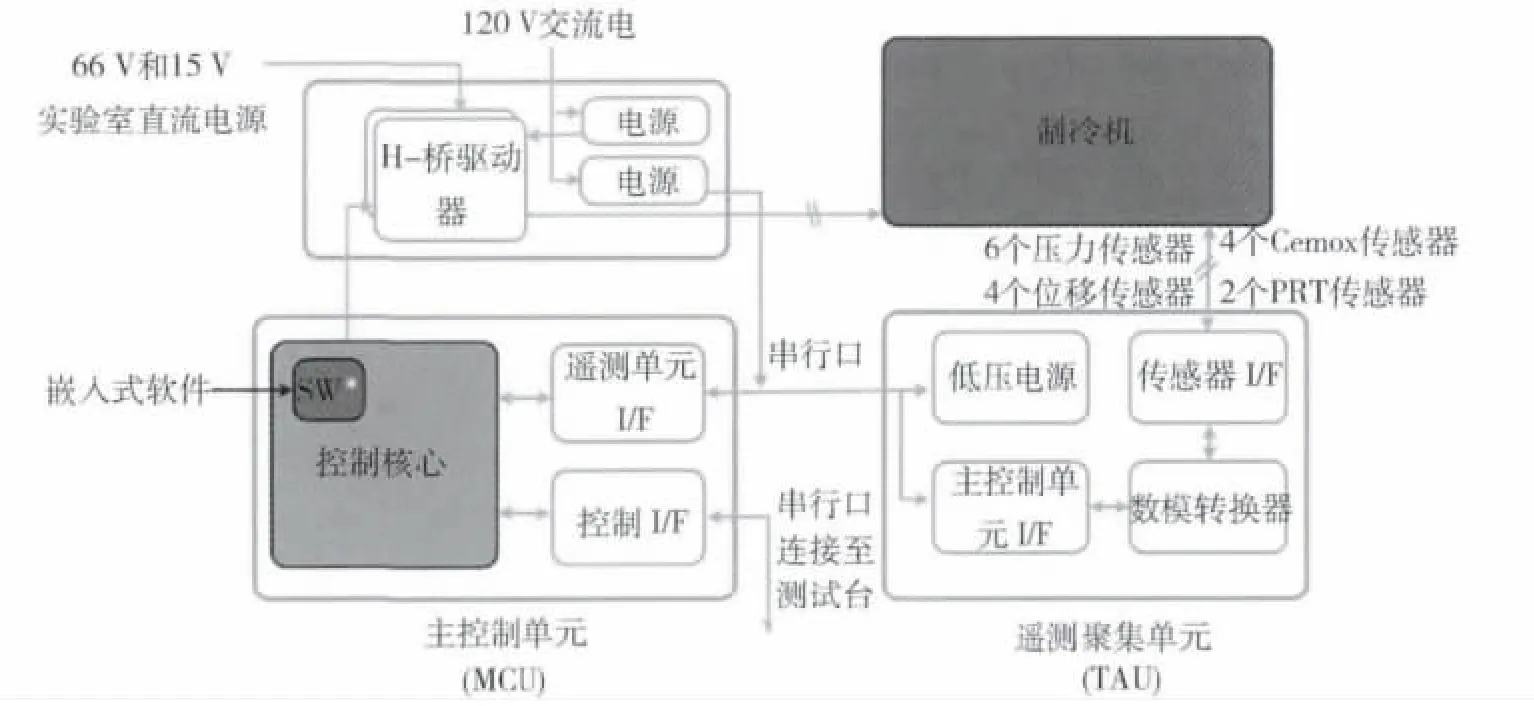
图1 制冷机控制器结构模块图Fig.1 Module structure diagram of cryocooler control electronics
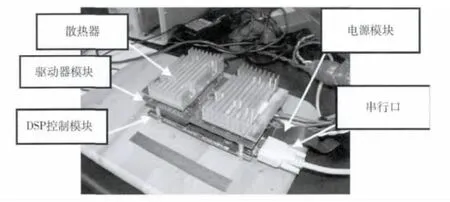
图2 Creare公司制冷机控制器原型结构图Fig.2 Prototype structure of cryocooler control electronics from Creare Co.
(1)温度信号处理模块:温度传感器将采集到的冷头温度转换成标准的采样信号。
(2)控制模块:将采集到的反馈信号与设定温度进行比较后,根据一定的算法生成脉宽可变的SPWM波形。
(3)驱动及滤波整形模块:接收SPWM波来驱动H桥电路产生交流电压输出,然后经滤波整形电路供给压缩机。
(4)通信及显示电路模块:控制器通过串行通讯接口与上位机建立联系,上位机通过串行口向制冷机和控制器发送控制命令、修改运行参数,控制器通过串行口向上位机传送所有遥测数据。
(5)电磁兼容及保护电路。
主要对斯特林和脉管制冷机的控制器进行总结与比较,分别以开环控制和闭环控制两方面,并以控制核心单元的发展和使用为线索回顾了制冷机控制器的研究进展,总结了制冷机控制器设计中的技术问题与要点,并对未来的发展趋势进行了展望。
2 斯特林与脉管制冷机控制器研究进展
低温制冷机控制器控制方式主要可分为有两种方式:开环控制和闭环控制。
2.1 开环控制方式
开环控制顾名思义就是系统的输出端与输入端之间不存在反馈,也就是控制系统的输出量不对系统的控制产生影响。低温制冷机的开环控制方式主要是在上位机上输入给定的电压幅值和频率,通过控制驱动电路控制压缩机的输入电压和频率,从而控制冷端的温度,开环控制框图见图3所示。表1总结了近10年的斯特林和脉管制冷机开环控制器的主要研究进展。
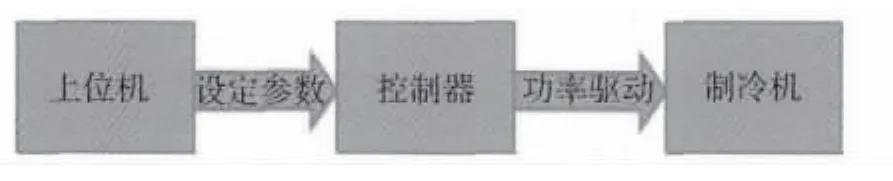
图3 斯特林和脉管制冷机系统开环控制框图Fig.3 Open loop control system of Stirling and pulse tube cryocooler system
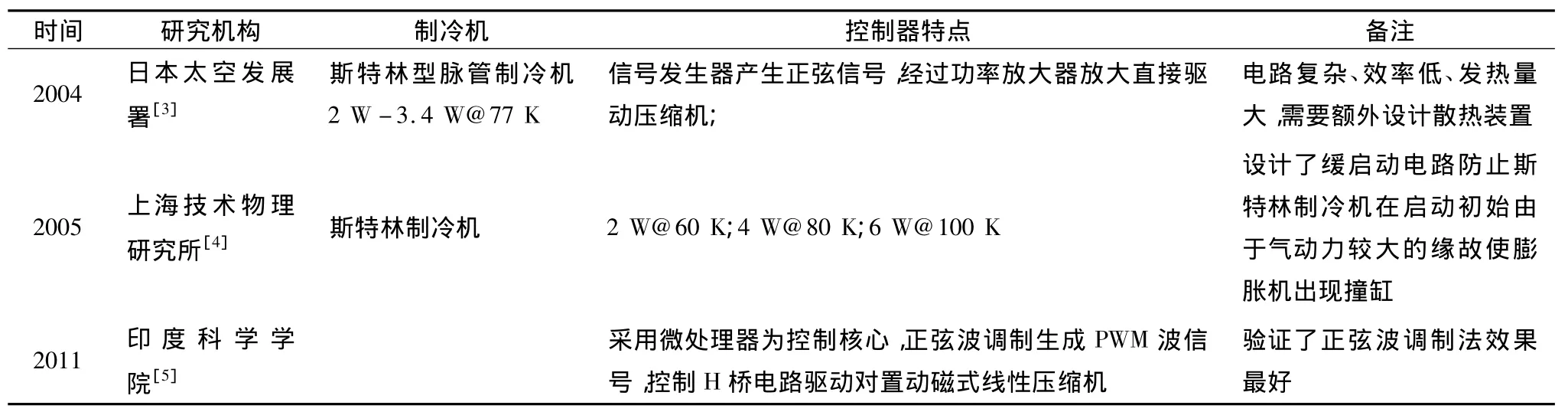
表1 斯特林和脉管制冷机开环控制器的研究进展Table 1 Research progress in open loop controller of Stirling and pulse tube cryocooler system
开环控制的优点是结构相对简单,成本较低,缺点是不能构成系统回路,冷头端的温度变化或外来未知干扰都会影响控制器的效果,这样就需要额外的措施根据低温制冷机的运行状况和目标来调节输入功率。
2.2 闭环控制方式
与开环控制相比,在闭环控制中,不管出于什么原因(外部扰动或系统内部变化),只要被控制量偏离规定值,就会产生相应的控制作用去消除偏差。因此,闭环控制具有抑制干扰的能力、对元件特性变化不敏感、且能改善系统响应特性等优点。低温制冷机系统中,由于机械磨损或工况环境等的改变使制冷机脱离最佳运行工况时,可以根据反馈来修正输入给压缩机的电压幅值和频率,从而保证低温制冷机长期工作在最佳状态,所以随着技术的进步和实际需求的提升,闭环控制系统广泛应用于低温制冷机控制系统中。表2给出了斯特林和脉管制冷机闭环控制原理的主要类型和特点。
对于脉管和气动式膨胀腔结构的斯特林制冷机,可控部件只有压缩机的活塞,这时只能通过调整输入功率来控制压缩机活塞的行程,从而达到控温的目的。
而在机动膨胀机型斯特林制冷机的温度闭环多回路控制系统中[6],如图4所示,控制量为温度,被控对象为压缩机活塞和排出器,被控参数为压缩机活塞和排出器位移、工作频率、压力波和排出器位移波之间的相位差等,主控回路为温度控制,副控回路为位移控制,驱动电源为35¯60 Hz的交流正弦电源,且为了实现制冷机冷头温度控制,各路交流正弦电源的幅度必须可调节,并且对于压缩机、排出器双驱动型还要求压缩机驱动电源与冷头驱动电源之间的相位0¯360°可调节[7]。美国 Raytheon公司针对其 HCRSP2型一级斯特林二级脉管的混合制冷机提出了两级闭环温度控制的概念[8],希望控制器能在513 W的输入电功下在二级和一级冷头分别得到2.6 W@35 K和16.2 W@85 K的制冷量。理论和实验分析[9]证明,改变膨胀机活塞位置并没有影响效率,文中提出了两个温度控制的方案:(1)调节压缩机行程来控制斯特林级温度,调节膨胀机活塞相位来控制脉管的温度;(2)调节膨胀机活塞相位来控制斯特林级温度,调节压缩机行程来控制脉管的温度。编写的代码可根据工作条件比较容易的在两种控制方案中进行灵活的选择。但是该控制器最大的挑战是两级温度闭环控制和振动控制的耦合,当膨胀机的相位或幅值相对压缩机变化时平衡减震器必须做出相应的改变来抑制机体的振动,Raytheon公司研制了一个主动前馈振动控制器来抑制小幅的振动,对于大幅的振动,Raytheon公司通过主动前馈振动控制器和平衡减震器共同作用来抑制大幅振动。表3总结了近年来斯特林和脉管制冷机控制系统的主要研究进展情况。
3 斯特林与脉管制冷机控制系统关键技术
3.1 控制器位置
德国 AEG Infrarot-Module GmbH 公司[10]针对红外应用开发了一系列控制器内置在压缩机里的分置式斯特林制冷机,如图5所示。与设计为3 W@80 K的分置式斯特林制冷机联机实验,最好取得了±25 mK的冷端温度波动。表4给出了控制器内置型和外置型的特点比较。
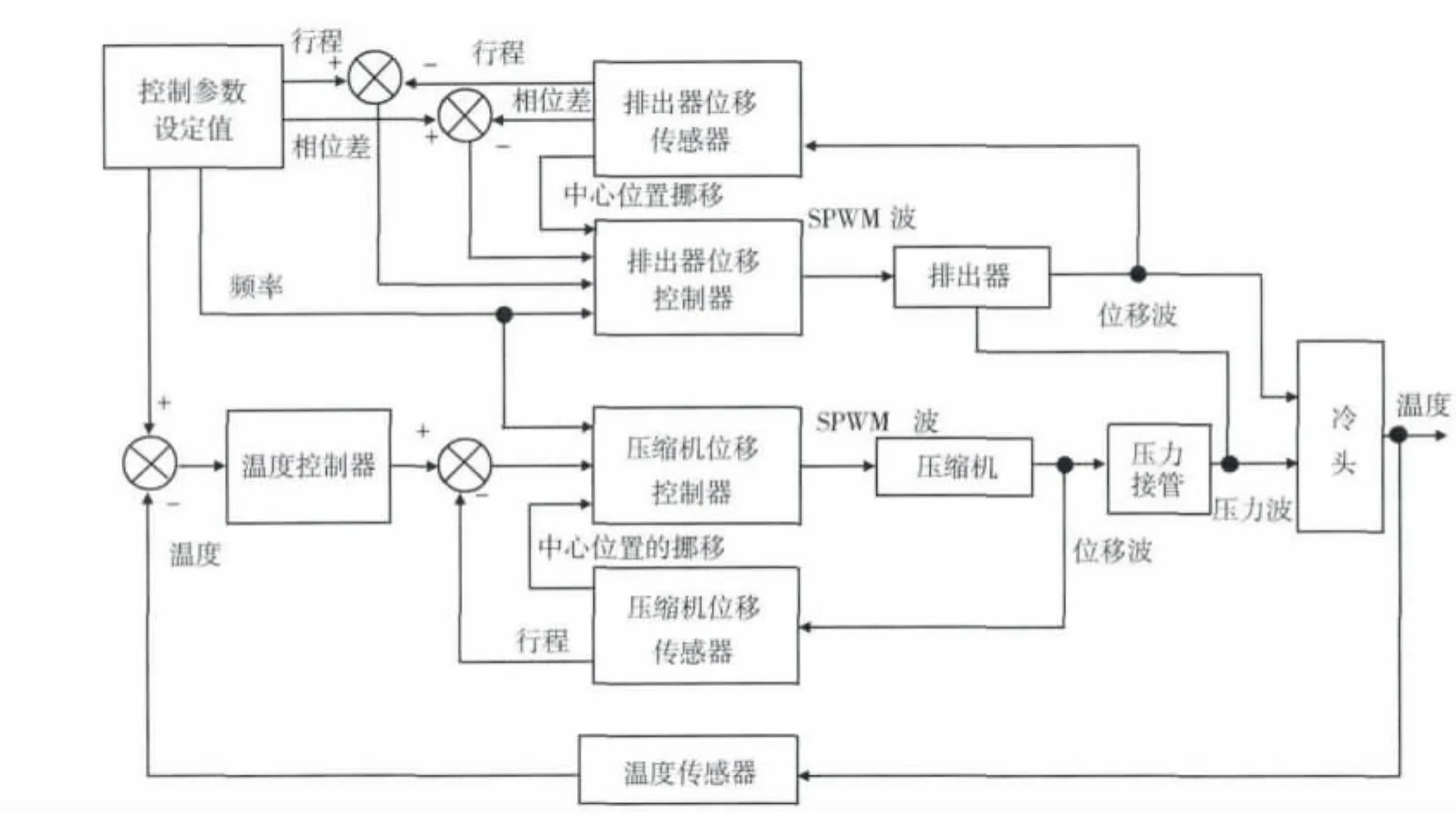
图4 斯特林制冷机控制器温度多回路闭环系统控制框图Fig.4 Multi-loop temperature closed-loop system control block diagram of Stirling cryocooler
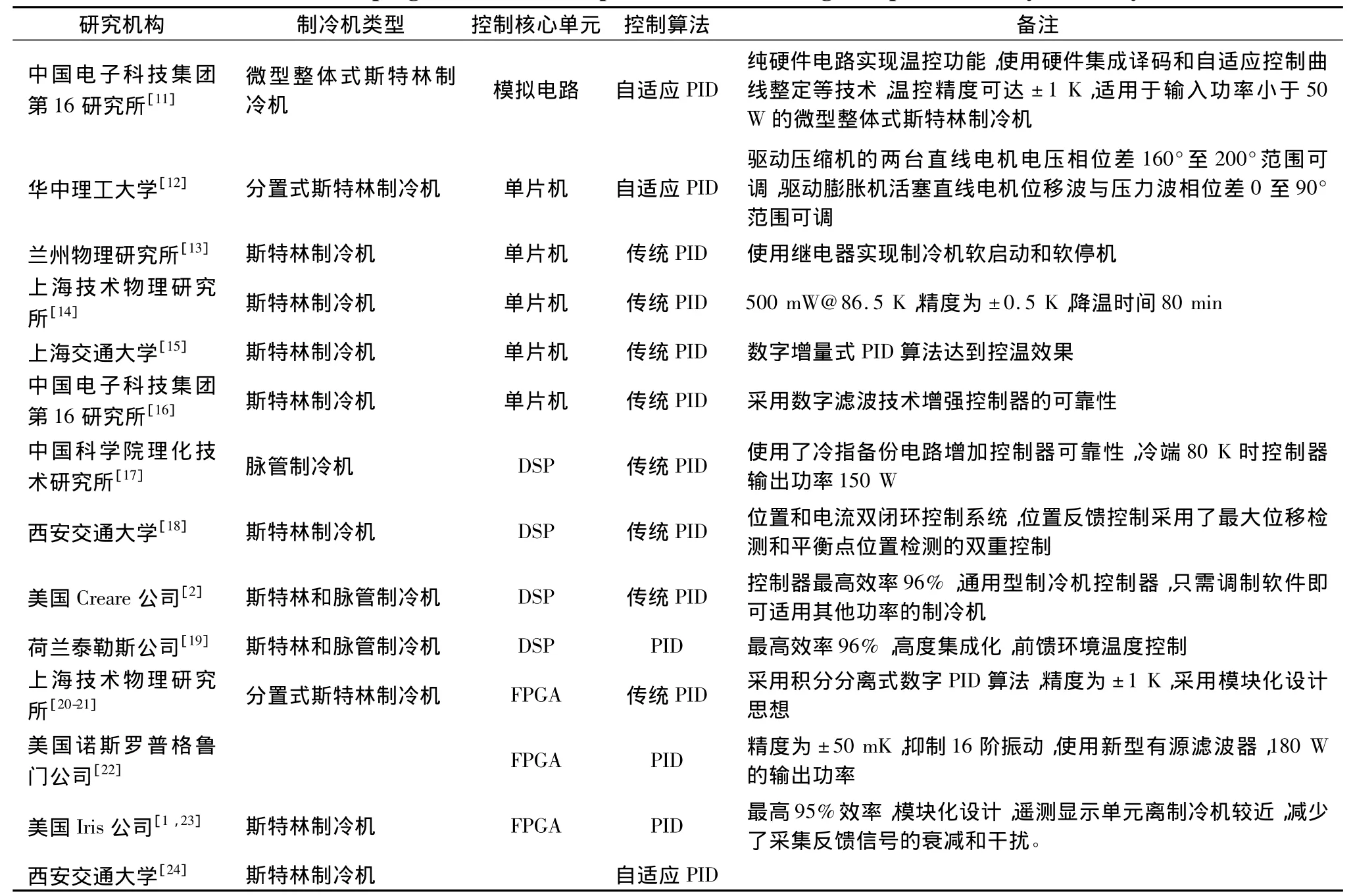
表3 斯特林与脉管制冷机闭环控制器的研究进展Table 3 Research progress in closed-loop controller of stirling and pulse tube cryocooler system

图5 控制器内置型斯特林制冷机Fig.5 Stirling cryocooler with internal control electronics
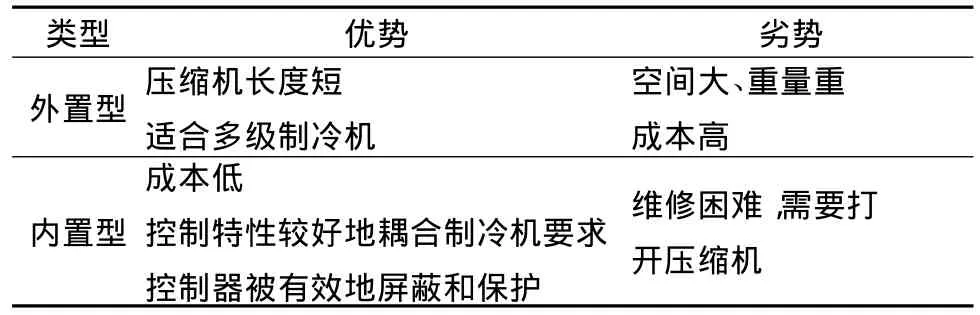
表4 控制器内置型和外置型的特点比较Table 4 Trade-offs of external vs.internal control electronics
3.2 控制系统算法
因为斯特林和脉管制冷机涉及了复杂的机电和热力学过程,大部分参数不但随着制冷机工作时间而改变,还随着温度的降低而变化,此外还会由于周围环境或装配质量等而改变。正是因为制冷机的工作参数的不确定性,使得建立准确的数学模型的难度很大,为了使制冷机获得最佳的工作性能,又必须对制冷机的运行参数进行测量和控制,所以必须采用复杂的控制算法,其中最常用和最成熟的算法是PID控制。
PID控制就是对反馈回来的输入偏差进行比例、积分和微分运算,运算的结果去控制执行机构来达到控制对象的目的,如图6所示。PID控制技术有着突出的优点:原理简单,使用方便,当被控对象的结构和参数不能完全掌握或得不到精确的数学模型时,控制器的结构参数必须依靠经验和现场调试来确定,而PID算法有一套完整的参数整定与设计方法,很多国内外研究机构或公司都使用PID控制算法来控制低温制冷机系统。
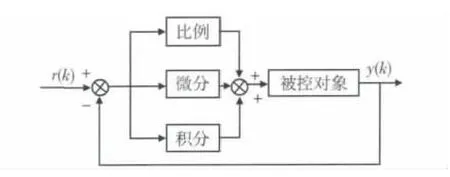
图6 PID控制原理框图Fig.6 PID control principle diagram
随着微机技术的发展,数字PID控制算法有效地解决了模拟PID算法的温漂问题,使PID控制更加灵活。在传统的PID算法中,因积分增益Ki为常数,在整个调节过程中其值不变,但斯特林制冷机控制系统对积分的要求是:设定温度与实测温度间的偏差大时积分作用减弱,否则会产生控制超调,甚至出现积分饱和;设定温度与实测温度偏差小时积分作用加强,否则不能满足温度控制稳定性的要求。研究人员通过引进改进的变速积分PID控制算法[25]和积分分离式的PID算法[20]来满足斯特林制冷机的应用性能,变速积分PID控制算法的基本思路是:设定温度与实测温度间的偏差大时,积分累积速度慢,积分作用弱;偏差小时,积分累积速度快,积分作用强。利用Matlab验证了变速积分PID控制器方案的有效性[25]。而实际中,制冷机模型的结构参数是随着时间和温度的变化而变化的,其中还包括一定的滞后和非线性特性,这就使得传统的PID控制系统很难达到最佳的控制效果。自适应PID控制结合了自适应控制和传统PID控制的优点,它具有自动辨识被控过程参数、自动整定控制器参数、能够适应被控过程参数的变化等优点,其次,它又具有常规PID控制结构简单、鲁棒性好和可靠性高等优点。西安交通大学虞鹤松等[24]设计了应用于分置式微型斯特林制冷机温度自适应控制系统,如图7所示,当制冷机充气压力一定时,压缩机和膨胀机的运行频率f、两者之间的相位差φ及各自的行程Z c、Z d都会影响到制冷温度T,但是f、φ和Z d对T的影响是非单调的,存在着最佳匹配。考虑到工程上的简便实用性,在选定控制方案时,将f、φ和Z d固定为设定值,调节变量取压缩机行程Z c,从而构成一个单输入、单输出制冷温度控制系统。由于斯特林制冷机系统具有分布参数的非线性慢时变特点,并考虑到随机干扰噪声影响和控制鲁棒稳定性的高要求,使用了一种基于CARIMA模型在线整定加权系数的最小方差、极点配置隐式算法,再加上采用黄金分割鲁棒控制器作为自适应控制的启动控制器,与制冷机联机后实验表明该控制能有效地克服未知确定性热负荷扰动,稳态无误差。

图7 西安交通大学制冷机控制系统框图Fig.7 Stirling cryocooler control system diagram of Xi’an Jiaotong University
随着智能控制理论的发展,模糊控制也开始使用在低温制冷机控制系统中。国立台湾大学Yee-Pien Yang[26]等将模糊控制的方法应用在分置式斯特林制冷机上,使用两个模糊控制器构成闭环系统,如图8所示。
3.3 驱动电路
对斯特林与脉管制冷机而言,压缩机是其唯一的压力波源,驱动电路为压缩机提供电功率输入,压缩机又驱动制冷机的工作,为制冷机的载荷提供有效的制冷量。
早期的驱动电路主要采用由模拟电路或计算机产生正弦信号,经功率放大器线性放大后加载在压缩机上[27-28],通过调节正弦信号的幅度或放大电路的放大倍数实现压缩机输入功率可调,通过调节正弦信号的频率来实现输入电压频率可调。虽然此方式生成的波形没有高频杂波,但是效率很低,且发热严重,需要额外设计散热装置来提高控制器的稳定性。

图8 双模糊控制器闭环系统框图Fig.8 Dual fuzzy control system
目前常用的驱动电路为通过生成SPWM(sinusoidal pulse width modulation)信号经光耦合隔离后驱动H桥逆变电路,再经滤波电路滤波后加载在线性压缩机上。H桥逆变电路是制冷机控制器的核心部分,是将母线的直流电压转换成负载所期盼的正弦波交流电压,目前采用最多的是正弦波脉冲宽度调制(SPWM)技术,SPWM法以采样控制理论中的面积等效原理为基础,用脉冲宽度按正弦规律变化而和正弦波等效的PWM波形即SPWM波形控制逆变电路中开关器件的通断,使其输出的脉冲电压的面积与所希望输出的正弦波在相应区间内的面积相等,通过改变调制波的频率和幅值则可调节逆变电路输出电压的频率和幅值。SPWM方法的实现主要由硬件调试法和软件生成法。硬件调制法可以用模拟电路构成三角波载波和正弦调制波发生电路,用比较器来确定它们的交点,在交点时刻对开关器件的通断进行控制,就可以生成SPWM波,如图9所示[29]。这种方法虽然便宜和紧凑,但电路复杂,难以实现精确的控制。
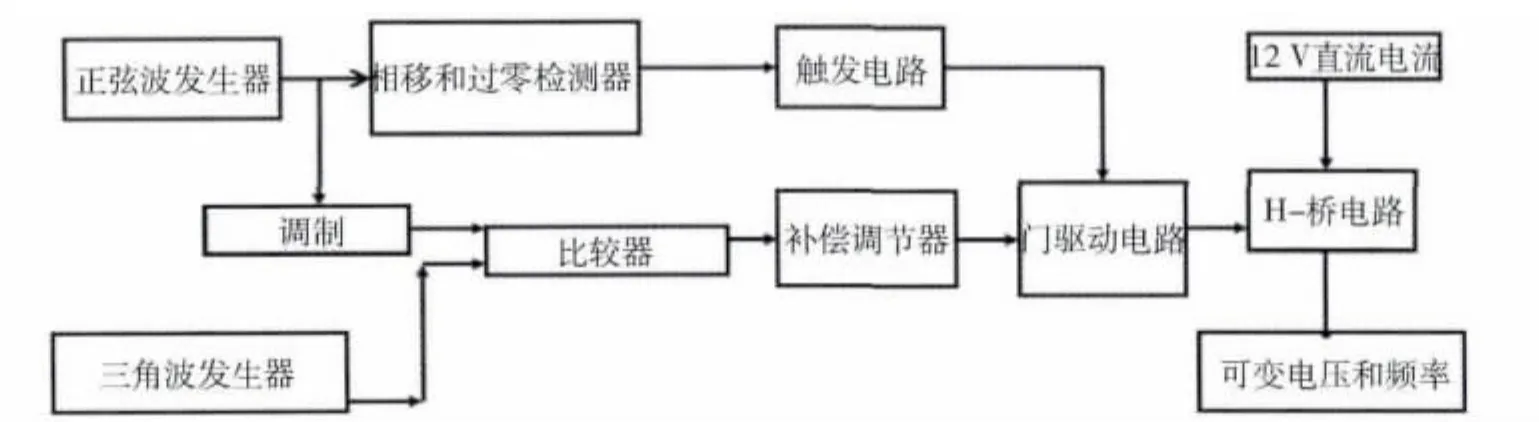
图9 模拟电路调制SPWM波结构图Fig.9 Complete block diagram of PWM generator
随着微机处理器技术的发展,软件生成法逐渐成为主流。软件生成法的基本算法主要为自然采样法和规则采样法。规则采样法是一种应用较广的工程实用方法,一般采用三角波作为载波。其原理就是用三角波对正弦波进行采样得到阶梯波,再以阶梯波与三角波的交点时刻控制开关器件的通断,从而实现SPWM法。在控制制冷压缩机往复运动时,需要使用可逆PWM系统,可逆PWM系统可分为单极性调制和双极性调制。因为单极性调制时,输出调制电压在正脉冲或负脉冲和零电平之间变化,脉动量小,因而电感电流脉动和输出纹波小,只有在电压和电流方向相反的时候才会有逆变桥交流能量的回馈现象,所以制冷机控制器常采用单极性调制方式。根据采样时刻的不同,又可分为对称规则采样和不对称规则采样,不对称规则采样因阶数多而更接近正弦。西安交通大学高小赟[18]等采用不对称规则采样算法,研制了基于DSP的斯特林制冷机控制系统,实现用单个DSP控制3台电机的设计构思并对单台直线电机进行了测试,实验测得的SPWM波有较好的正弦性。
3.4 控制核心处理器
由于模拟电路制造的控制器电路结构复杂且抗干扰能力差,单片机在数字和逻辑功能方面可以完成一些具有一定智能的任务,再加上集成的存储器、模数转换器和脉宽调制电路等电路,使得单片机开始使用在斯特林与脉管制冷机控制系统中。华中理工大学黄声华[12]等和兰州物理研究所王世耀等[12]使用80C196单片机为核心控制单元研制斯特林制冷机控制器,制冷机冷头的温度和压缩机、排出器的位移等信号经A/D转换送CPU分析判断,直接生成SPWM波电压驱动逆变电路产生3路幅值、相位和频率可调的交流电压加载到直线电机上,控制3台直线电机运动。控制器又通过串行通讯接口与上位机建立联系,人们通过上位机向制冷机和控制器发送控制命令,修改运行参数,控制器通过串行口向上位机传送所有遥测数据。
早期的斯特林与脉管制冷机控制器多以单片机为核心来实现。由于集成度低,外围器件较多,导致控制器体积大;其次由于其运行速度低,导致以PWM或SPWM方式驱动电机时载波频率较低,致使电机电流波形失真加大,谐波含量高,影响制冷机性能[7]。
相对于单片机而言,DSP(digital signal processor数字信号处理器)具有很高的集成度,具有更快的CPU,更大容量的存储器,有的DSP片内还集成了A/D和采集/保持电路,可提供PWM输出。DSP器件采用改进的哈佛结构,具有独立的程序和数据空间,允许同时存取程序和数据。它强大的数据处理能力和高运行速度是最值得称道的两大特色。DSP电路可以根据采集的温度信号,灵活控制压缩机的输入电压、相位以及频率值,进而保持冷头温度的稳定性。
近年来,THALES公司[19]开发了以 DSP作为核心器件的控制器,如图10、11所示。该控制器使用内部集成的高精度A/D转换器来采集处理冷头的温度信号,还可以监测环境温度以对输出控制进行微调。控制器采用异步通信的方式实时与外界系统平台进行交互,可以即时调整控制参量并监测制冷机的状态。该控制器高度数字化,具有结构紧凑、体积小、效率高、可靠性高等优点,可以用作多种制冷机的控制器,并可以在极端环境中使用。
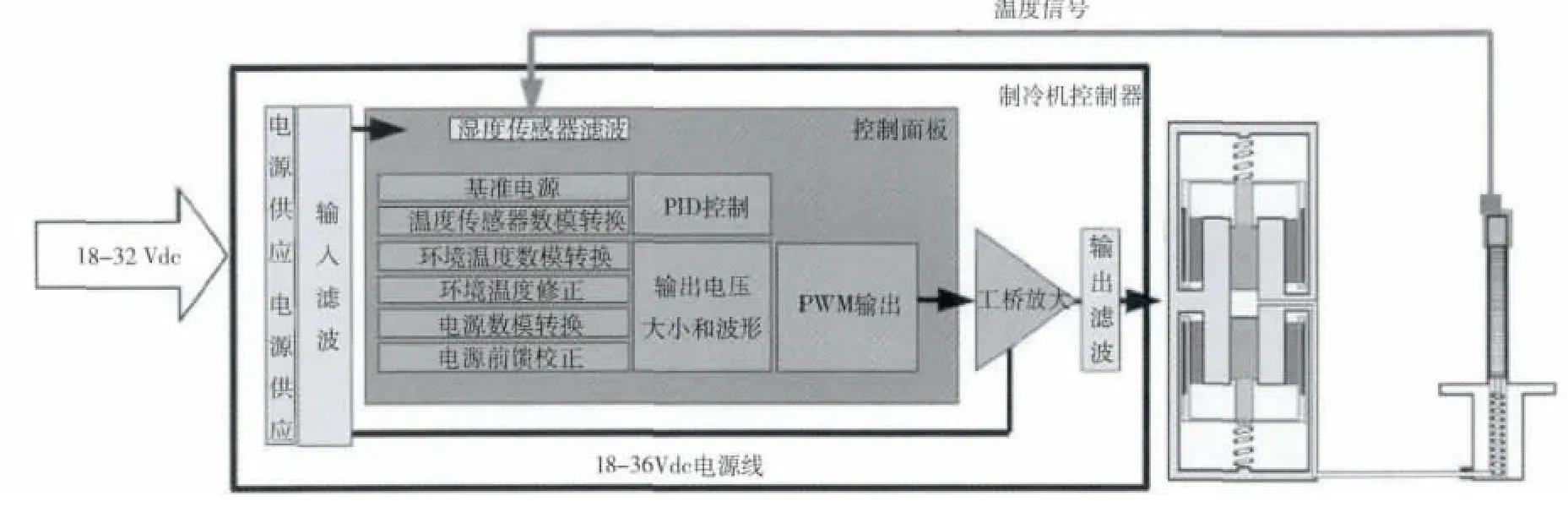
图10 THALES公司基于DSP制冷机控制器功能框图Fig.10 Block diagram of Thales Cryocooler Control Electronics

图11 THALES公司制冷机控制器Fig.11 Photograph of the Thales Cryocooler Control Electronics
DSP技术的发展促进了低温制冷机控制器的发展,但存在两个缺点:DSP芯片直接生成的SPWM信号载波频率比较低,且其通过软件运算生成SPWM信号的可靠性较低。针对DSP技术的缺点,采用FPGA(Field Programmable Gate Array现场可编程逻辑器)硬件的控制器被开发出来,其可生成较高频率的SPWM波,运算速度更快,波形稳定且抗干扰能力强。可通过DSP或单片机采集反馈信号对FPGA进行初始化设置,以达到更可靠的控制结构。FPGA内部是全并行体系结构,有着运行速度快、时序控制能力强、编程调试方便等优点,非常适用于变频系统实现脉宽调制;且FPGA使用硬件实现运算,抗干扰能力强,不存在程序跑飞的风险,有着较强的稳定性和可靠性。
上海技术物理研究所朱鹏[20-21]等开展了基于FPGA的牛津型分置式斯特林制冷机控制系统的研究。控制系统的结构框图如图12所示,温度探测电路负责为温度二极管提供稳恒电流,并读取温度二极管上的电压信号;温度电压信号经过放大电路放大后再经A/D转换,送入FPGA中作为PID模块的输入参量进行运算处理,根据制冷机的热动力学特性进行分析,反映到控制器PID算法的参数整定中,FPGA生成SPWM波,SPWM波经光电耦合电路作用在功率驱动电路上,驱动电路采用逆变H桥电路,由智能功率模块(IPM)驱动4个功率MOSFET,产生双极性SPWM电压波形,同时给压缩机的两个直线电机供电。
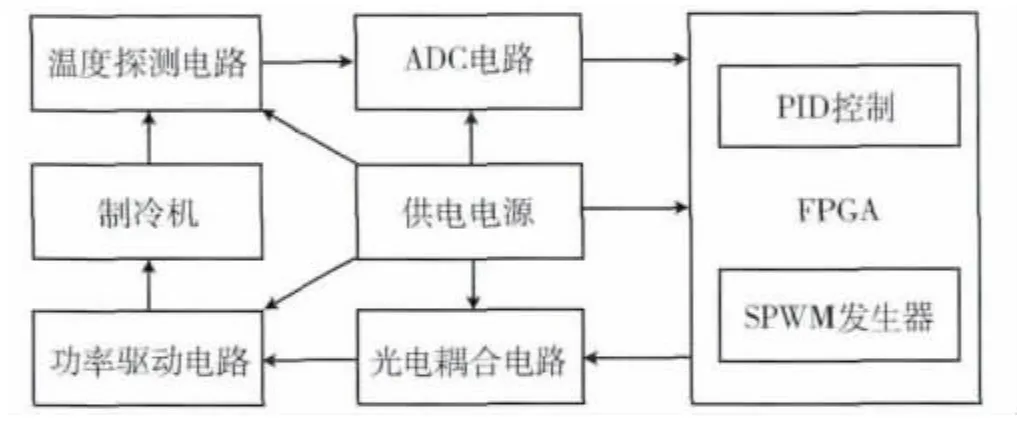
图12 基于FPGA的斯特林制冷机控制器结构框图Fig.12 Structure of the Cryocooler Control Electronics based on FPGA
3.5 电磁兼容
制冷机系统是一个大功率的系统,电机运行时会向外发射电磁干扰,其控制器也是电磁干扰的重要来源,对于星用的制冷机系统来说,如果电磁干扰信号过大时探测器的探测信号甚至会被淹没,所以有必要为制冷机系统进行电磁兼容设计。
线性压缩机无论是动磁式还是动圈式直线电机驱动,磁场的突变都会向外发射交变电磁干扰。而控制器中的桥式逆变电路,内部的功率电子器件工作在高速开关状态,其产生的高频脉冲信号具有很大的d u/d t和d i/d t;同时电路中存在电感、电容器件以及线路杂散电感和分布电容,在d u/d t和d i/d t的作用下会导致脉冲电流和脉冲电压的产生。功率电子器件的频繁开关导致输入电流脉动变化,在直流输入侧形成差模干扰电流,输出电压中谐波的存在则导致输出侧产生差模干扰电流;逆变电路中电压的突变d u/dt经过分布电容的耦合在逆变器输入输出端形成共模干扰电流。由于控制器输出交变大电流,且电路中部分环路的d i/d t较大,会向空间辐射大量的电磁干扰,这些干扰中有交变电干扰和交变磁干扰,同时,控制器信号处理电路也会发生交变电干扰。
为了在保证制冷机和控制器安全正常运行的前提下降低系统对外的电磁干扰,常采取以下办法[20]:(1)使用金属良导体制成的电控箱将控制器电路屏蔽起来,并将电控箱表面涂黑;(2)控制器和制冷机之间采用屏蔽双绞线连接,屏蔽网两边分别连接到电控箱和压缩机外壳上;(3)在每个集成电路的电源和地之间加一个很小的退耦电容;(4)采用混合接地方法,各电路单元的地总线在电源滤波器处单点连接。(5)在直流母线和控制器电源输入端之间接滤波器,美国Raytheon公司[8]研制了一种有源线性滤波器,可以有效的抑制谐波,如图13所示。

图13 美国Raytheon公司有源线性滤波器Fig.13 Active ripple filter of Raytheon Co.
3.6 保护电路和可靠性设计
低温制冷机控制器为了防止突然启动时压缩机活塞撞缸,必须施加相应的缓启动装置[30-31]以及过流、过压保护电路。
低温制冷机控制器在轨运行时,是暴露在充满高能粒子和宇宙射线的空间恶劣环境中的,所以控制器空间抗辐射设计是非常重要的。制冷机控制器的抗辐射设计主要考虑辐射带和宇宙线的总剂量效应和单粒子效应的防护问题,一般采用局部屏蔽、系统优化等方法进行总剂量防护,而单粒子效应防护尽量采用软件方法[17]。低温制冷机控制器的热设计对于提高控制器的可靠性方面也很重要,控制器热设计的主要目标是将元器件的热耗有效的传给设备底板和设备壳体,确保控制器正常运行器件,元器件不受热应力的损坏。空间中控制器的热设计主要从设备的热传导和辐射传热两个方面进行考虑。
4 总结与展望
随着近年来越来越多的仪器和设备的运行和发展离不开低温制冷技术,尤其是空间技术中的红外探测器和X射线探测器等,空间工业一直希望采用机械制冷机来获得比辐射制冷温度低很多、比固体制冷剂运行寿命长得多的低温技术,以供科学研究和空间观测之用,空间工业对斯特林和脉管制冷机进行了广泛的研究和开发。而控制器是斯特林和脉管制冷机系统中必不可少的一个部分,其性能直接影响了制冷机系统的可靠性。因为空间应用对控制器有很多特殊的要求,比如:重量小、效率高、抗辐射干扰、高可靠性、高温度控制精准度和稳定性、最大限度地减小振动,以及提供对制冷机的保护和在轨诊断等。开环控制结构简单但效果作用有限,所以空间上普遍采用闭环控制技术。
随着微处理器和大冷量的小型低温制冷机性能的逐步提高,基于DSP或FPGA核心的制冷机控制器成为斯特林和脉管制冷机控制系统的技术已基本成熟,但在具体应用中中国的研究尚存在以下若干技术问题需要注意和优化。
(1)控制算法。随着对制冷机系统温控精度的要求越来越高,性能优越的控制器显得越发的重要,而控制算法又是影响冷头温控精度的最重要因素之一。迄今为止,PID算法控制仍然是斯特林和脉管制冷机控制器中最常用的控制算法,但传统的PID算法无法突破制冷机系统的滞后、时变性和非线性等特性造成的误差,对PID参数进行精确的整定。随着现代控制理论和智能控制理论的发展,各种新算法的不断涌现为控制系统的设计开辟了新的途径,将自适应控制、预测控制和模糊控制等理论应用于PID控制器,对PID控制的参数进行自整定,以满足制冷机的特性。从表3中可以看出,中国国内的控制器温控精度还落后与欧美世界水平,加强对制冷机模型的认识理解以及如何将新型控制算法与传统PID算法有效地结合起来将成为国内研究人员的立足点。
(2)控制器效率。从表3中可以看出,欧美发达国家制冷机控制器效率最高已经达到96%,而中国国内控制器的效率还远低于这个水平。制冷机控制器的功率消耗主要集中在H桥驱动电路模块,如何提高逆变器的转换效率是提高整个控制器效率的关键。提升逆变器效率的方法主要为:1)软开关逆变器拓扑;2)新型功率开关器件;3)新型控制策略如空间矢量脉管调制(SVM)技术。
(3)模块化。从长远角度看,通用型模块化设计是节省成本的重要手段,模块化设计允许利用设计良好的通用硬件结构,仅通过修改软件代码[2]和增删驱动卡的数量[1]即可满足不同的制冷机需求,欧美发达国家已经对制冷机模块化设计进行了很多尝试,而中国国内的研究还刚刚起步。
对于未来空间用低温制冷机控制器的发展是在保证控制精度和响应速度的前提下,并且考虑对震动的抑制以及适应空间恶劣环境的基础上,以最小的重量提供最大的功率输出,进而得到最大的制冷量。
1 Kirkconnell CS,Freeman JJ,Hon R C,et al.Modular Linear-Drive Cryocooler Electronics[C].Cryocoolers 16,International Cryocooler Conference,Inc.,Boulder,CO,2011:667-674.
2 Pilvelait B,Kline-Schoder R.Universal Drive for Tactical Cryocoolers[C].Cryocoolers 15,International Cryocooler Conference,Inc.,Boulder,CO,2009.
3 Kushino A,Sugita H,Matsubara Y.Performance of Japanese pulse tube coolers for space applications[C].Cryocoolers 13,International Cryocooler Conference,Inc.,Boulder,CO,2005:101-107.
4 郭伟立.基于缓启动原理的开环斯特林制冷机电控箱的研制[C].第七届全国低温与制冷工程大会,昆明,2005.Guo Weili.Make of The Stirling Cryocooler Control Box Base On Slow Up Open Loop Principle[C].The 7th national conference on refrigeration and cryogenic engineering,Kunming,2005.
5 Jacob S,Prabhu K S,Karunanithi R,et al.Design and Analysis of Power Controller for Moving Magnet Linear Motor Compressor[C].Cryocoolers 16,International Cryocooler Conference,Inc.,Boulder,CO,2011:675-679.
6 贾旭鹏,姜继善,于秀明,等.斯特林制冷机温度闭环控制系统的探讨[J].真空与低温,2006,12(3):176-179.Jia Xupeng,Jiang Jishan,Yu Xiuming,et al.Study of Stirling Cryocooler temperature closed loop control system[J].Vacuum and Cryo-genics,2006,12(3):176-179.
7 魏 广,马少君,姜继善,等.星用牛津型斯特林制冷机驱动方案综述[C].第十届全国低温工程大会暨中国航天低温专业信息网2011年度学术交流会,兰州,2011.Wei Guang,Ma Shaojun,Jiang Jishan,et al.Review of satelite-use Oxford type stirling cryocooller driven solutions[C].The 10th National Conference on Cryogenic Engineering,Lanzhou,2011.
8 Jackson M A,Kieffer M H,Ortiz JA,et al.21st Century Cryocooler Electronics[C].Cryocoolers 15,International Cryocooler Conference,Inc.,Boulder,CO,2009.
9 Finch A T,Price K D,Kirkconnell CS.Raytheon stirling/pulse tube two-stage(RSP2)cryocooler advancements[C].Advances in Cryogenic Engineering,VOLS.49A AND B.2004:1285-1292.
10 Ruhlich I,Korf H,Schellenberger G.Advanced control electronics for Stirling cryocoolers[OB/OL]//Bellingham:Spie-int soc Optical Engineering,2003:15-25.
11 胥春茜,周皖生,李 多.一种微型整体式斯特林制冷机驱动控制器的设计[C].第八届全国低温工程大会暨中国航天低温专业信息网2007年度学术交流会,北京,2007.Xu Chunqian,Zhou Wansheng,Li Duo.A miniature integral type Stirling cryocooler drive controller design[C].The 8th National Conference on Cryogenic Engineering,Beijing,2007.
12 黄声华,刘扬娟.分置式斯特林制冷机的控制器[J].压缩机技术,1998(1):7-10.Huang Shenghua,Liu Yangjuan.The controller of split stirling cryocooller[J].Compressor Technology,1998(1):7-10.
13 王世耀,姜继善,于秀明,等.斯特林控制器的研制[J].真空与低温,2002,8(2):111-114.Wang Shiyao,Jiang Jishan,Yu Xiuming.Development of Stirling Cryocooler Controller[J].Vacuum and Cryogenics,2002,8(2):111-114.
14 纪国林,吴亦农,王 彪,等.航天斯特林制冷机系统.第六届全国低温工程与制冷工程大会[C],西安,2003.Ji Guolin,Wu Yinong,Wang Biao,et al.Space Stirling Cryocooler system[C].The 6th National Conference on Refrigeration and Cryogenic Engineering,Xi'an,2003.
15 汪振兴,佘 焱,姜建国.直线伺服电机及其驱动控制器设计[J].电机与控制应用,2006,33(2):9-11.Wang Zhenxing,She Yan,Jiang Jianguo.Design of a Linear Servo Motor and its Drive Controller[J].Electric Machines and Control Application,2006,33(2):9-11.
16 孙启兰,周皖生,胥春茜,等.数控高精度PWM调制特种电源[J].低温与超导,2005,33(3):6-10.Sun Qilan,Zhou Wansheng,Xu Chunqian,et al.Numerical control high precision PWM modulation of special power supply[J].Cryogenics and Superconductivity,2005,33(3):6-10.
17 郑 鹏.星载脉冲管制冷机电控系统设计[D].西安:西安电子科技大学,2011.Zheng Peng.The design of electronic control system of satelite-use pulse tube cryocooler[D].Xi'an:Xidian University,2011.
18 高小赟,阎治安,夏建民,等.基于DSP的斯特林制冷机控制系统的研制[J].微电机,2006,39(5):29-33.Gao Xiaoyun,Yan Zhian,Xia Jianmin,et al.Development of a Control System for Stirling Cryocooler based on DSP[J].Micromotors,2006,39(5):29-33.
19 Willems D,Benschop T,Groep WV D,et al.Update on Thales flexure bearing coolers and drive electronics[C].Infrared Technology and Applications XXXV,2009.
20 朱 鹏,傅雨田.空间用斯特林制冷机的过程控制[J].低温与超导,2011,39(2):1-3,9.Zhu Peng,Fu Yutian.Process control of space-used Stirling cryocooler[J].Cryogenics and Superconductivity,2011,39(2):1-3,9.
21 朱 鹏.一种空间用斯特林制冷机的控制系统研究[D].北京:中国科学院研究生院,2011.Zhu Peng.A satelite-use stirling cryocooler system research[D].Beijing:Graduate School of Chinese Academy of Sciences.
22 Harvey D,Danial A,Davis T,et al.Advanced cryocooler electronics for space[J].Cryogenics,2004,44(6-8):589-593.
23 Freeman JJ,Murphy JB,Kirkconnell CS.Experimental demonstration of cryocooler electronics with multiple mechanical cryocooler types[C].Infrared Technology and Applications XXXVIII,PTS1 AND 2.2012.
24 虞鹤松,吴晓菁,李敬忠.分置式微型斯特林制冷机温度自适应控制系统的研究[J].西安交通大学学报,1997(10):8-13.Yu Hesong,Wu Xiaojing,Li Jingzhong.Research on split miniature stirling cryocooler temperature control system[J].Journal of Xi'an JiaoTong University,1997(10):8-13.
25 刘静洁,李飞艳,李海英,等.变速积分PID控制算法在斯特林制冷机驱控电路上的应用[C].第十届全国低温工程大会暨中国航天低温专业信息网2011年度学术交流会,兰州,2011.Liu Jingjie,Li Feiyan,Li Haiying,et al.The speed integral PID control algorithm in the application of stirling cryocooler drive control circuit[C].The 10th National Conference on Cryogenic Engineering,Lanzhou ,2011.
26 Yang Y P,Huang B J.Fuzzy control on the phase and stroke of a linear compressor of a split-Stirling cryocooler[J].Cryogenics,1998,38(2):231-238.
27 Garaway I,Lewis M,Bradley P,et al.Measured and Calculated Performance of a High Frequency,4 K Stage,He-3 Regenerator[C].Cryocoolers 16,International Cryocooler Conference,Inc.,Boulder,CO.,2011.
28 Shurakov A,Tong C E,Blundell R,et al.Microwave stabilization of a HEB mixer in a pulse-tube cryocooler[J].IEEE Transactions on Applied Superconductivity,2013,23:150150431.
29 Karunanithi R,Jacob S,Gour A S.Drive Electronics for Moving Magnet Type Linear Motor Compressor[C].Cryocoolers 16,International Cryocooler Conference,Inc.,Boulder,CO.,2011.
30 Frank D,Olson J,Roth E.Test results of an engineering model 2-stage pulse tube cryocooler for cooling at 75 K and 130 K[C].Advances in Cryogenic Engineering,Vols51A and B.2006:1959-1966.
31 Olson J,Champagne P,Roth E,et al.Lockheed Martin 6K/18K cryocooler[C].Cryocoolers 13,International Cryocooler Conference,Inc.,Boulder,CO.,2005:25-30.