视觉引导淡水鱼自动去头尾系统关键技术
2014-12-20李楷模文跃兵
李楷模 文跃兵
(湖南工业职业技术学院,湖南 长沙 410208)
淡水鱼食品加工需要进行去头尾作业,通常是人工操作实现的,生产效率低,不能满足现代生产的要求。中国淡水鱼产量近几年连续增加,淡水鱼食品加工技术在冷冻保鲜、自动去鳞、腌熏与烘烤加工等方面进展很快,但自动去头尾技术的研究还未涉及,影响了淡水鱼食品加工企业的生产规模。近年来,随着计算机视觉技术迅速发展,出现了许多应用计算机视觉技术的生产自动化系统[1-3],如利用计算机视觉技术根据苹果的大小自动分级[4]、根据药丸颗粒的颜色自动分类等,提高了生产效率。本研究提出了一种视觉引导淡水鱼自动去头尾系统方案,该方案的关键就是如何运用计算机视觉技术实现对淡水鱼头、尾的准确定位。由图像不变矩理论,利用计算机视觉技术实现鱼头、尾匹配定位方法,然后应用可编程逻辑控制器(PLC)实现准确对刀及自动完成去鱼头、尾作业。
1 工作原理
视觉引导去头尾系统如图1所示,该系统用于淡水鱼食品加工自动生产线。系统工作时,去鳞的淡水鱼由输送带1送到工作台2,当鱼头接触3接触传感器E时,接触传感器E发出指令,启动工作台中间的带式传动机构,鱼身朝图1中左方向直线移动,当鱼头接触11接触传感器F时,接触传感器F发出两个指令:① 工作台中间的带式传动机构停止,鱼身处于待去头尾工作状态;② 指令夹紧装置7动作,夹紧装置的“弓”形压块内设气囊,由进气、排气电控阀控制进排气,进气电控阀5获得指令打开进气阀门,夹紧装置7下的气囊进气将鱼夹紧到调定的压力值后压力传感器自动关闭。图1中13、15是图像传感器 M、N分别采集鱼头、鱼尾数字图像信号,该信号由千兆以太网传输给控制计算机。控制计算机通过图像处理算法实现鱼头及鱼尾位置的准确定位,并经由PLC模块控制步进电机驱动刀具进入切割鱼头及鱼尾位置,完成鱼头、鱼尾切割作业。具体由图像传感器M、N获得特征图形后发出指令控制电机A、B完成X方向准确对刀,电机D完成工作台上下Z轴方向动作控制,使刀具能完全切到鱼头、鱼尾部分;电机C控制工作台前后Y方向动作,Y、Z方向的控制使刀具能完全分割鱼头、鱼尾;鱼头、尾分割完后,刀具必然接触工作台底部传感器10和右侧的传感器8,分别发出指令:① 将分割的鱼头、尾移走(图中没有标明);② 排气电控阀6放气,将夹紧的鱼松开;③ 控制工作台回到原来状态;④ 工作台中间的带式传动机构启动,将切割了鱼头、尾的鱼身移向传送带12,准备下一个加工工序,同时工作台准备下一个工作循环。

图1 视觉引导去头尾系统结构图Figure 1 Visual guide to cutting the head and tail system structure diagram
2 鱼头、鱼尾位置定位算法设计
中国的淡水鱼养殖家鱼主要有:青鱼、草鱼、鳙鱼和鲢鱼,其身体结构见图2~5。

图2 青鱼身体结构Figure 2 Black carp body structure

图3 草鱼身体结构Figure 3 Grass carp body structure

图4 鳙鱼身体结构Figure 4 Bighead carp body structure

图5 鲢鱼身体结构Figure 5 Silver carp body structure
通过4种常见的淡水鱼鱼身结构,不难发现4种淡水鱼的鱼头、尾部均呈规则的几何形状,头部呈扇形,尾部呈燕尾形。针对上述特点,本研究基于具有仿射和旋转不变性的Hu矩[5-7]设计鱼头、鱼尾定位算法。
2.1 鱼头、鱼尾匹配定位原理
“矩”是一个统计学概念,用于描述随机变量的分布形态,在数字图像处理中,矩可用来描述某一图像物体的形状,图像I中某一模版的pq阶矩定义为:

pq阶中心距定义为:

其中,xa、ya分别为该模版图像x坐标和y坐标的平均值,将中心矩除以m00的幂,可得到归一化处理的中心距:

Hu矩是归一化中心矩的线性组合,对于图像的某些变化缩放、旋转和镜像映射等具有不变性,Hu矩的定义为:

本试验的方法应用Hu矩来判断检测图像中某一区域和标准鱼头(鱼尾)模板的相似程度,进而实现鱼头、鱼尾的精确定位。判定某一区域为鱼头(鱼尾)的判据为:

其中,D为模板相匹配阈值,可根据检测对象的统计数据确定,hAi和hBi分别表示图像区域和标准鱼头(鱼尾)的i阶Hu矩。
2.2 检测步骤
(1)制作需加工鱼鱼头(鱼尾)标准模板,计算标志模板的Hu矩,设定模板相匹配阈值D;设定检测图像中鱼头(鱼尾)匹配区域初始大小及初始位置。
(2)计算检测图像鱼头(鱼尾)初始区域的Hu矩,按照式(11)所述判据判断初始区域是否就是鱼头(鱼尾)所在位置。
(3)若初始位置不是鱼头(鱼尾)所在位置,以5像素为步长,向初始区域的8邻接方向移动匹配区域,计算新匹配区域的Hu矩,判断新区域是否是鱼头(鱼尾)所在位置。
(4)若移动80个像素仍然未找到鱼头(鱼尾)所在位置,以5像素为步长调整匹配区域大小,重复步骤(3)。
(5)若区域大小变化了±20个像素没有找到鱼头(鱼尾)所在位置,程序停止,报错;(2)~(4)任一步骤中若找到鱼头(鱼尾)所在位置,输出该区域参数。
3 试验及分析
(1)验证本试验提出的Hu矩匹配鱼头、鱼尾判据的有效性。分别制作100×80像素大小的鳙鱼鱼头(鱼尾)标准模板,在另一分辨率为800×600像素的鳙鱼图像中选定20个区域,其中第1~4个区域基本和鱼头(鱼尾)位置重合(如图6中A、B所示),5~20个区域则是鱼的其他部分(如图6中虚线区域所示),各区域按照匹配判据计算得到T值如图7所示。由图7可知,当区域为鱼头鱼尾部分时,式(11)判据中T值计算结果小于3.1;当区域为鱼的其他部分时,式(11)判据中T值大于4.3;两者区别显著,没有交错部分,本研究提出的鱼头、鱼尾匹配判据是有效的。
(2)对本试验检测算法进行进一步验证,采用上述鳙鱼鱼头(鱼尾)标准模板在50帧分辨率为800×600像素不同的鳙鱼图像中寻找鱼头(鱼尾);应用式(11)所述判据时,模板相匹配阈值取值3.7,共有43帧图像正确找到了鱼头(鱼尾);4帧图像只找到了鱼头、鱼尾之一;3帧图像鱼头、鱼尾均未能找到,本试验检测算法有效率达86%。

图6 区域选取Figure 6 Illustration of selected areas
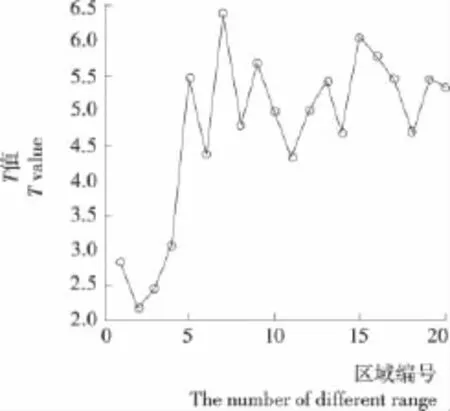
图7 不同区域T值计算结果Figure 7 Results of different Tvalue
4 结论
提出了一种视觉引导淡水鱼自动去淡水鱼头、尾系统方案;基于图像不变矩理论,提出了鱼头、鱼尾匹配定位方法。结果表明,本试验采用的匹配判据能有效区分鱼头(鱼尾)与鱼的其他部分;本试验检测算法用于鳙鱼鱼头、鱼尾定位检测有效率达86%以上,数据表明此技术完全可以应用于鳙鱼食品加工自动生产线。
引入Zernike矩和小波矩的一些思想,并与本试验算法相集成,进一步提高鱼头、鱼尾识别的准确性,是下一步研究的方向。
1 胡永彪,杜成华.机器视觉技术在工程机械上的应用[J].机械工程,2009,40(10):53~56.
2 张萍,朱政红.机械视觉技术及其在机械制造自动化中的应用[J].合肥工业大学学报(自然科学版),2007,30(10):1 292~1 295.
3 谭建平,王宪,文跃兵.一种基于机器视觉平面摆动的摆心测试方法:中国,201110382185.3[P].2012-07-04.
4 安爱琴,余泽通,王宏强.基于机器视觉的苹果大小自动分级方法[J].农机化研究,2008(4):163~166.
5 李迎春,陈贺新,赵铭,等.基于飞机目标的仿射不变矩研究[J].吉林大学学报(信息科学版),2003,21(5):85~88.
6 张水发,王开义,王书锋,等.基于优化矩不变特征的鲜切菜在线分级技术[J].农业工程学报,2011,27(10):354~358.
7 应义斌,景寒松.黄花梨果形的机器视觉识别方法研究[J].农业工程学报,1999,15(1):192~196.