一种新型的可爬楼梯轮椅结构设计及运动分析
2014-12-19李育文位建康王红卫杨改云
李育文,位建康,王红卫,张 金,杨改云
LI Yu-wen,WEI Jian-kang,WANG Hong-wei,ZHANG Jin,YANG Gai-yun
(郑州轻工业学院 机电工程学院,郑州 450002)
0 引言
中国老龄事业发展报告(2013)中指出:2013年老年人口数量突破2亿,老龄化水平达到14.8%[1]。第二次全国残疾人抽样调查主要数据显示:全国共有残疾人口8000多万,占全国人口总数的6.34%[2]。有些老年人和残疾人下肢活动不便,他们不能像正常人一样靠双腿支撑站立或者蹲下。这时他们就需要其他辅助工具——轮椅。轮椅发展到现在已有几百年的历史,普通轮椅功能多种多样,现在轮椅趋向于电动。智能化方向发展,但是它们一般仅适合在平地上使用,很少具备爬楼和翻越路障的能力。现在轮椅市场上,能爬楼梯的轮椅很少且价格昂贵。由于履带结构能够适应各种复杂路况,而且爬楼梯重心起伏小、稳定性好,很适合爬楼梯使用。国外也有很多公司开发了履带式轮椅,但是由于履带本身的局限性导致轮椅平地行走时转弯不便、行走速度缓慢[3~7]。因此,依据我国国情,设计一款经济实惠的爬楼梯轮椅是十分必要的。综合以上考虑,本文从对使用者的方便程度和经济因素出发,在传统轮椅的基础上,设计了履带底盘和轮椅车轮能够切换的轮椅,该轮椅既可以依靠车轮平地行走和又能依靠履带上下楼梯的多功能轮椅。另外该轮椅能够使使用者在上下楼梯时处于水平位置,提高舒适性。
1 轮椅的整体结构及其功能
传统的轮椅设计只是满足一些基本的功能,在设计时把轮椅的靠背、座椅、脚踏和腿托等直接安装固定在整体轮椅焊接架上,这样在使用过程中不能实现轮椅座椅的位置调节功能。本文提出的设计思路是把座椅做成可以翻转的,翻转之后座椅与地面的夹角为30°,由于楼梯与地面的斜度一般在30°左右,这样轮椅在楼梯上时,座椅就处于水平位置。通过切换机构可以放下履带底盘,轮椅依靠履带攀爬楼梯。这样重心起伏小,舒适型高。本系统的机械部分主要包括:轮椅主体框架、可翻转的座椅、切换机构、履带底盘四部分组成。轮椅的整体设计简图如图1所示。
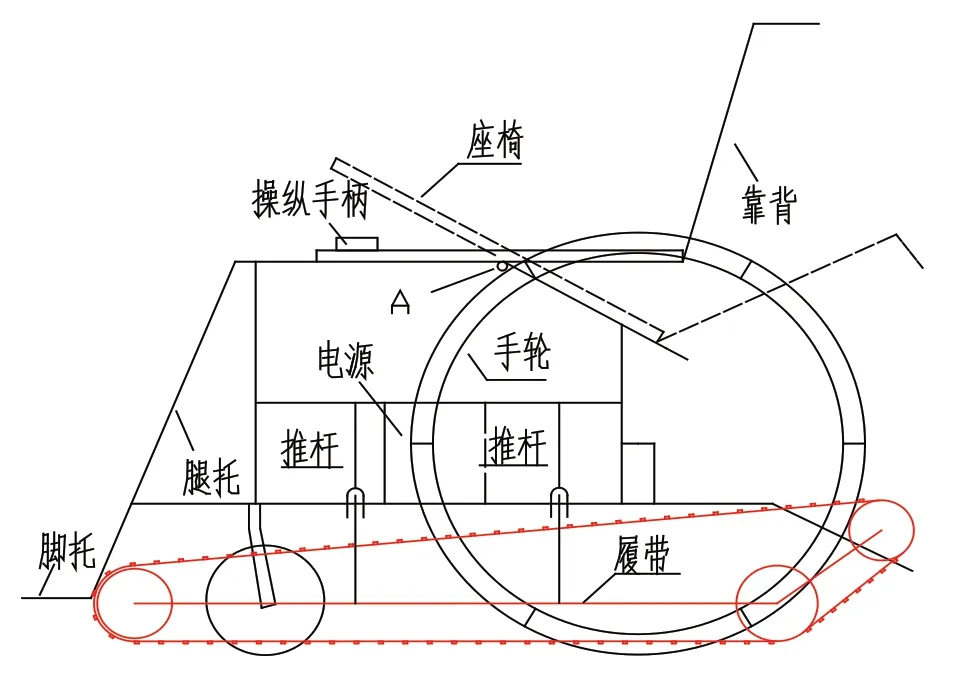
图1 轮椅整体结构简图
其中,切换机构固定在轮椅框架上,然后和履带底盘耦合在一起,通过切换机构带动履带底盘上下移动。座椅翻转依靠外力辅助。切换机构通过两个推杆驱动,从而实现上下移动。履带底盘上安装有大转矩无刷直流电机,通过电机驱动履带轮实现转动。平地行走依靠后轮上的两个电机驱动,可以实现前进、后退、转弯等功能。当需要攀爬楼梯时,座椅翻转到倾斜支架上;然后推杆带动切换机构放下履带,同时使轮椅车轮离地,轮椅此时靠履带行走。
2 座椅调节结构及其功能
该动能原理图如图2所示,为座椅调节结构,轮椅的支架倾斜部分与地面的夹角大致为30°。楼梯的斜度为30°左右,这样当座椅绕A点翻转到倾斜支架上以后,轮椅背向楼梯爬楼时,使用者与地面大致水平。通过模糊调节控制座椅位置结构简单、易于实现。使用者处于座椅的不同位置时,辅助者翻转座椅所需的力不同。一般情况下,辅助者所使用的力不会大于150N。这对辅助者来说不会感觉很吃力。
该功能运用了杠杆原理,调整简便。能够使轮椅在楼梯上或者斜坡上时时刻保持座椅的水平,固定装置能在上下楼梯时够防止座椅移动,提高了舒适性。
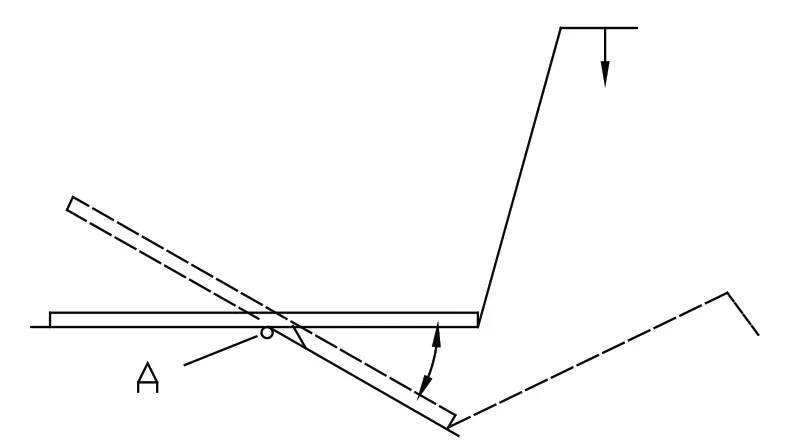
图2 座椅调整示意图
3 切换机构及其功能
传统的轮椅只是单一的轮式或者履带式的结构,只能用车轮或者履带行走,两者不能进行切换。因此使用起来很不方便。本文提出的设计思路是在传统轮椅上安装切换机构,通过这种机构把轮椅和履带底盘联接在一起。这样可以保证轮椅车轮和履带底盘间的随时切换。切换机构的简图如图3所示。

图3 切换机构
3.1 切换机构工作原理
如图所示,该机构由推杆驱动9个活动杆件组成。机构中A、B、C为轮椅上的固定点,滑块与履带底盘连接并能在其上面滑动。其工作原理为:当使用者需要上下楼梯时,推杆匀速伸长带动杆件2和对称的杆件向下移动,进而推动B、C上的杆件绕着两点转动,同时滑块沿着履带底盘滑动。由于B、C上杆件的转动履带底盘开始向下移动。移动到一定位置时候轮椅车轮离地。轮椅依靠履带来行走。反之,当使用者需要在平底上行走时,由于履带比较笨重,在平底上行走不便。所以推杆收缩时,轮椅车轮着地。轮椅依靠车轮来行走。利用该功能能够随时随地切换轮椅车轮和履带底盘,切换机构机构简单、操作方便。
3.2 切换机构的仿真分析
为了验证设计的机构是否合理,功能能否满足要求,其轨迹是否合理,需要对机构进行仿真分析。考虑到操作的难易程度以及软件接口的兼容性问题,这里只是在ADAMS中建立切换机构杆件模型[8,9],忽略了轮椅架、座椅、车轮等其他轮椅结构。在ADAMS中的模型如图4所示。
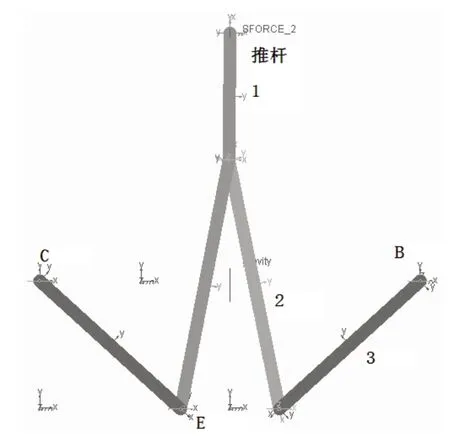
图4 切换机构ADAMS模型
从对切换机构的仿真过程可以看出,该机构动作与要求的动作一致。推杆所施加的力为1500N,仿真时间为0.17s,步数为50。从仿真结果中提取出E点的速度、加速度和轨迹(如图5所示)。CE杆随推杆1的角速度、角加速度以及与水平位置时的夹角的变化曲线(如图6所示)。

图5 E点速度、加速度、轨迹曲线
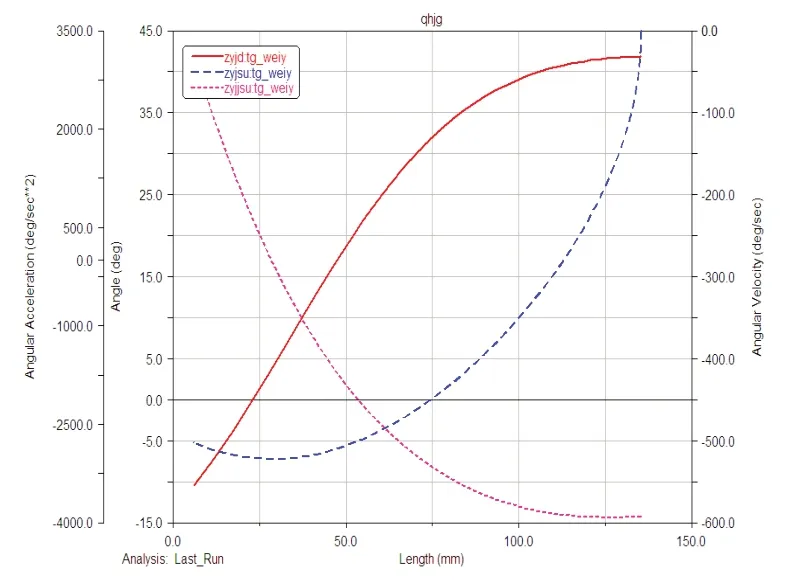
图6 CE速度、加速度、位移随杆1的变化曲线
从图5可以看出,E点的轨迹大致为一个四分之一圆,E点的速度为Y方向上的分量,变化比较平缓,只是在达到最终位置之后继续变化时才出现拐点。从图6所示的CE随杆1的变化曲线可以看出,位移、速度变化都比较平缓。因此,该机构能够满足设计要求。
该机构运用推杆驱动,整体结构紧凑简单、控制容易、便捷性较好,使用者使用时更加人性化。
4 轮椅的运动特性分析

图7 爬楼过程简图
如图7所示,当轮椅上楼梯时,首先通过辅助者调节座椅,使其达到倾斜支架上,然后推杆驱动切换机构带动履带底盘下降,最终轮椅车轮离开地面,轮椅依靠电机驱动履带主动轮带动履带底盘行走。
轮子和履带切换式爬楼梯轮椅的优越性能体现在低能耗的轮式快速运动的特点和高翻越障碍性能的履带运动特点[10],其运动特性在于,这种结构能够随时切换自身的驱动形式,很好的适应各种复杂路况,当需要在平地上运动时,依靠车轮就能完成各种动作,当遇到楼梯时,切换到履带模式并配合座椅调整结构可以实现翻越障碍和攀爬楼梯。该轮椅的爬楼过程如图7所示。
5 结论
该新型多功能爬楼梯轮椅结合了轮式和履带式轮椅的优点,能够适应各种路况。能够随时进行平地行走功能和爬楼梯功能的切换;座椅调节功能能使座椅在楼梯上处于水平位置,保证了舒适性;控制模块结构简单、操作容易;并对切换机构进行了仿真分析,通过仿真得到了切换机构运行平稳、没有干涉现象,证明了机构设计的合理性,为轮椅样机制作提供了理论依据。
[1]吴玉韶.老龄蓝皮书:中国老龄事业发展报告(2013)[M].社会科学文献出版社,2013:2-3.
[2]国家统计局、第二次全国残疾人抽样调查领导小组.第二次全国残疾人抽样调查主要数据公报[J].中国残疾人,2006(12):5.
[3]MORALES R,GONZALEZ A,FELIU A,etal.Environment adaption of a new staircase-climbing wheelchair[J].Autonomous Robots,2007,23(4):275-292.
[4]巩海伟,张建国,刘合荣,朱贤仲.下肢残障人多功能器械的机构设计与分析[J].机械设计与制造,2012,(11):58-60.
[5]廖晓辉,沈大中,王东署.智能轮椅的研究现状与关键技术分析[J].制造业自动化,2008,30(4):1-6.
[6]胡义华,谌炎辉,张树林.多功能自助轮椅设计的研究[J].制造业自动化,2012,34(7):132-134.
[7] 任怡,张峻霞,张建国,胡军.立卧两用电动轮椅车的设计[J].天津科技大学学报,2009,24(1):47-50.
[8]李军,邢俊文.ADAMS实例教程[M].北京:北京理工大学出版社,2002.
[9]郭卫东.虚拟样机技术与ADAMS应用实例教程[M].北京:北京航空航天大学出版社,2008.
[10]王东晓,高学山,刘云辉.轮/履耦合式无障碍轮椅系统设计及其运动分析[J].郑州大学学报(工学版),2013,33(4):55-59.
