一种基于卫星通信与GIS的舰队实时监视系统
2014-12-19王郑睿
王郑睿
(河南水利与环境职业学院,河南 郑州450008)
0 引 言
随着航运业的不断发展,图形化的船舶及舰队状态监视系统已经得到了广泛的应用。这种系统可以通过图形化的方式,直观的将当前船舶及舰队的位置、航向等信息显示出来,相较于传统的基于雷达等技术的舰队监视系统,具有直观、友好、自动化程度高等优点,已经成为了当前商用及军用舰队航行中不可或缺的助航装备。然而,纵观当前获得实用的图形化舰队监视系统,由于较低的信息刷新速率、较少的信息显示种类和难以与其他信息系统兼容的特性,使得其使用起来十分不便,且工作效率较低[1]。为了克服以上问题,本文通过深入研究舰队监视系统的需求,依托当前成熟的通信技术和地理信息系统(GIS)技术,实现了一种信息刷新速率较高且能够兼容多种信息的舰队监视系统,在本文中,将对该系统的框架和各部分功能进行详细描述,并通过性能分析,证明该系统的有效性和可行性。
1 系统整体框架
整个系统由舰队终端、卫星通信网、岸基服务器和GIS 服务器4 个部分组成。其中舰队终端安装于船舶之上,负责收集和传输舰队的信息,并传输给系统服务器进行处理;卫星通信网负责提供相应的通信接口,并高效、可靠地将信息发送给岸基服务器;岸基服务器是本系统的核心,其与GIS 服务器相连,根据舰队传输的信息,将各种信息进行融合和计算之后,生成特定的文件,并交给GIS 系统进行处理;GIS 服务器是通用、开放的地理信息服务提供商,如Google Earth、百度地图等,GIS 服务器通过接收岸基系统服务器提交的文件,对自身的地图及信息显示进行更新,进而安装于船舶之上的GIS 终端可以访问GIS 服务器,获得图形化的舰队状态显示。系统的整体结构图如图1 所示。

图1 系统整体结构图Fig.1 Structure of the fleet monitoring system
本文所提出的系统中,各种信息的格式采用KML[2]进行定义和描述。KML 是一种基于XML 的地标定义语言,与其他信息格式相比,具备以下优势:首先,其灵活的描述语言能够定义多种类型信息,具备较好的可扩展性;其次,由于其基于XML,因而可以方便地使用HTTP 协议进行传输,并与GIS 系统进行融合。以下对系统各个关键模块进行功能描述。
1.1 舰队终端
舰队终端主要包含3 部分功能:接收来自RS232 接口的信息,通过信息传输模块传输数据和图像信息,包含GIS 终端访问GIS 系统。
经过多年的研究和开发,海上图像采集系统[3]已经逐渐成熟,并被如UTM 这样的机构广泛使用。类似于海上图像采集系统、雷达等这样的装置,能够提供船舶和舰队的位置、航向、航迹等多种信息,并通过相应的协议,如RS232,传输给部署于船舶之上的系统终端。
通常情况下,这类信息分为2 种:一种是较为简单的数据信息,如航速、经纬度等;另一种是较为复杂的图像信息,如船用摄像机拍摄的图像等。对于数据信息来说,使用UDP 协议[4-5]传输较为合适,该协议使用较为简单,可以降低舰队终端的实现复杂性,同时由于其无连接的特性,能够更好的适应舰队的移动特性。而对于图像来说,其发送和接收分别采用wget[6]和rsync[7]应用接口,这2 种接口被广泛应用于传输船舶摄像机采集图像的传输,相比与其他传输模式和接口,其更加适合于图像更新等任务。
GIS 终端具有较大的灵活性,当前的GIS 应用有多种形式,因而GIS 终端可以使用专用的系统应用,采用加密信道访问专门的GIS 系统;也可以使用通用的个人计算机,通过访问Web 端的地理信息系统查看舰队信息;甚至可以使用智能手机配合相应的APP,实现对于GIS 系统的访问。则可以看出,本文提出的系统与传统的专用系统相比,采用外部、成熟的GIS 系统,大大降低了实现的难度以及使用的成本。
1.2 卫星通信网
实现舰队终端与卫星通信网的互联,主要采用甚小口径天线地球站(VSAT)实现,通过VSAT 能够将舰队终端接入SEAMOBIL 和HISDESAT 卫星通信网络,这2 种卫星通信网在海事、通信等领域,均已得到广泛的应用,具有大量的地面卫星站,并覆盖了除两极之外绝大多数的地球表面,如图2所示。

图2 卫星通信网示意图Fig.2 Satellite communication network diagram
VSAT 通信采用C 波段或X 波段,相比与国际海事卫星(INMARSAT)终端,VSAT 能够提供更好的数据传输容量。同时INMARSAT 采用舰队船舶共享连接的方式,为每艘船舶提供的带宽有限,而VSAT 则采用的是专用信道,能够提供给船舶和舰队更加稳定的传输信道和更高的传输质量。另外,与INMARSAT 相比,VSAT 具有更低的获取成本和使用成本,因而使用VSAT 具有更好的经济性。
通过以上介绍的卫星通信网,使得舰队终端和岸基服务器之间能够建立持久稳定的网络连接,从而可以提供实时的、高信息刷新速率的数据服务。
1.3 岸基服务器
岸基服务器是整个系统的核心,由图1 显示的岸基服务器与舰队终端之间的交互过程,可以看出整个系统是一个中心化的结构。
岸基服务器共有3 个主要功能:接收卫星通信网传输的数据和图像信息;根据接收到的信息融合并计算生成KML 文件;通过HTTP 协议栈[8]将KML传输给相应的GIS 服务器。
根据第1. 1 节的叙述,岸基服务器具有2 种不同的数据接收接口,其中UDP 协议栈负责接收舰队终端传输的数据信息,而“rsync”应用接口负责接收传输的图像信息。这2 种接口与舰队终端接口类似,均可使用软件实现,并已得到广泛应用。
岸基服务器中的KML 文件产生模块是岸基服务器的关键功能,其能够根据实现定义的KML 文件格式,和各种信息的内容,将信息嵌入KML 文件模板中,产生正确可用的KML 文件,进而通过HTTP 协议,将其传输给绑定的GIS 服务器。

2 KML 文件的格式与生成
KML 文件时当前GIS 系统广泛使用的地标文件,由于KML 由XML 发展而来,因而KML 文件的格式和定义方法集成了XML 的特点。
2.1 KML 文件的格式
与一般基于XML 的语言类似,其广泛采用标记定义各种数据块。其主要含有以下几个部分:位置数据、模型数据、航迹数据、图像数据和字节数据。各个部分的格式如下所示:

通过以上的KML 文件格式,可将不同类型的信息嵌入其中形成KML 文件。
2.2 KML 文件的生成
KML 文件生成的过程,就是根据KML 文件格式,不断分析与填充相应数据的过程[9]。KML 文件生成的流程图如图3 所示。
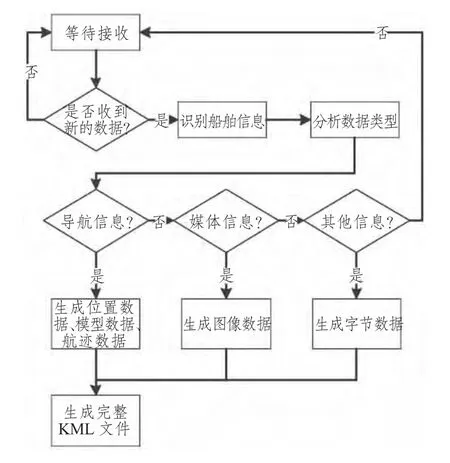
图3 KML 文件生成流程图Fig.3 Flow chart of KML files′ generation
KML 文件的生成过程应遵循以下步骤:首先,KML 文件产生模块需要根据信息来源判断和识别船舶的信息;然后根据导航信息生成基本的数据,之后再根据信息中包含的媒体信息和其他信息[10],对KML 文件进行完善;最后形成完整的KML 文件,并使用HTTP 协议进行传输。
3 系统实现与仿真
最后,本文在OPNET 中构建模拟的卫星通信网,并仿真实现了舰队终端和岸基服务器,模拟了舰队终端与岸基服务器之间的交互过程,并利用Google Earth 证明了生成KML 文件的正确性。在OPNET 中的实验拓扑图如图4 所示。

图4 仿真拓扑图Fig.4 The simulation topology
3.1 系统功能实现
通过舰队终端产生的信息,仿真宽带卫星通信网络,UDP 流量约为25 ~36 kb/s,持续时间约为20 s,丢包率小于1%。而传输图像数据的速率约为80 ~120 kb/s,持续时间约为15 s。根据以上仿真可知,本系统中采用的通信接口和链路,其带宽能够满足系统信息的传递以及更新需求。
按照第2.2 节中方法,生成KML 文件,并在Google Earth 中导入,生成的实时监视状态图,如图5 所示。

图5 Google Earth 中加载KML 文件图Fig.5 KML file loaded in Google Earth
通过图5 可看到,KML 文件可以在通用的GIS系统中得到显示和应用,不仅包含了船舶的位置、航向等,还能够根据需求显示详细的航迹信息及其他信息。
3.2 负载测试
在系统的实际使用过程中,由于本系统结构采用中心化的结构,因而岸基服务器将承担较大的负载。本文将利用图4 所示拓扑,继续对岸基服务器的工作负载进行测试,主要测试内容是KML 文件产生时,对服务器资源的占用。
在仿真中,采用通用X86 计算机模拟服务器,采用Core i3 双核处理器,4G 内存,运行Win7(64bit)操作系统,采用软件实现KML 产生模块,设计各个舰队终端的信息到达服从泊松分布,在第3.1 节中研究的信息通信负载下进行测试,最终得到CPU 的占用率如图6 所示。

图6 CPU 负载测试结果Fig.6 Result of CPU load test
通过以上测试结果可知,在实际使用过程中,当带宽满足系统传输要求时,CPU 的占用率约为16% ~22%,证明岸基服务器能够满足本系统用户的实际需求。
4 结 语
图形化的舰队实时监视系统,是近年来出现的船舶及舰队用助航设备,凭借其自动化和图形化的特点,迅速得到了广泛的应用。然而由于设计的缺陷和技术的制约,当前使用的船舶及舰队状态监视系统,仍有许多不足,无法完全满足用户的需求。本文针对以上问题,提出了一种基于卫星通信与GIS 的舰队实时监视系统,对该系统的整体框架进行了设计,并对各个主要模块进行了功能描述,设计了KML 文件的格式与生成算法。最终对系统功能进行了实现和仿真,在通用的GIS 平台上验证了本文提出方法的正确性和可用性,并在OPNET 仿真平台上,测试了系统核心模块的工作负载,证明了本系统的高效性和可靠性。
[1]Google Earth main features[EB/OL].http://earth.google.com/intl/es/tour.html
[2]KML language definition[EB/OL]. http://code. google.com/intl/esES/apis/kml/documentation/kml _ 21tutorial.html.14/04/2009.
[3]SORRIBAS J,TUDELA A,CASTELLÓN A,et al. An oceanographic data acquisition system (ODAS)for ethernet LAN for spanish research vessels [C]//Oceans′ 98 Conference Proceedings (IEEE,ed.),1998(1):93 -97.
[4]UDP Protocol.RFC specification[S].
[5]National Marine Electronics Association,The NMEA 0183 Protocol,Version 3.0[S].
[6]Wget.Official Documentation[S].
[7]TRIDGELL A. Efficient algorithms for sorting and synchronization[S].San Diego:University of San Diego,1999.
[8]GOUSIOS G,SPINELLIS D. A comparison of portable dynamic web content technologies for the apache web server[C]//Proceedings of the 3rd International System Administration and Networking Conference SANE 2002,2002(3):103 -119.
[9]TRULLOLS E,SORRIBAS J,DEL RIO J,et al. A virtual distributed measurement system[C]//IEEE Instrumentation and Measurement Technology Conference,2003(5):368 -375.
[10]GAMMA E,HELM R,JOHNSON R,et al.Design patterns:elements of reusable object-oriented software [M].Massachusetts:Adisson - Wesley Professional Computing Series,1995:289 -315.
