雷达导引头单脉冲成像研究
2014-12-18吴一龙磨国瑞
吴一龙,刘 辉,磨国瑞
(西安电子工程研究所总体3部,陕西西安 710100)
本世纪的几次局部战争经验表明,与常规武器相比,精确制导武器的作战效能大幅提高,精确制导武器将成为未来的主要作战武器。伴随着隐身技术、电子对抗技术的迅速发展,未来战场环境更加复杂多变,要求精确制导技术具备更强的反隐身能力、抗干扰能力和目标识别能力。毫米波雷达制导技术是一种全天候、全天时的主动式制导技术,其具有较好的全天候性能、对目标的快速搜索能力和作用距离远的特点,但其目标分类识别能力较差。为提高毫米波雷达的目标识别能力,通过毫米波雷达成像技术提取目标的几何特征和内部结构特征,以提高对目标的识别能力,同时利用毫米波雷达二维成像获得几何特征和空间分布实现提高对抗角反射体或箔条等无源干扰和有源干扰能力。现有成熟的雷达成像技术主要有采用侧视、斜视等成像方式的SAR、DBS等技术,但此类技术存在前视成像盲区,大幅制约了其在精确末制导中的应用,因此需开展雷达的前视成像技术研究。
目前,雷达前视高分辨成像技术主要有解卷积方位超分辨技术[1]和单脉冲前视成像技术。但由于解卷积方位超分辨技术的处理算法较复杂以及对目标检测信噪比的苛刻要求,其工程应用适应性较差,仍需进一步完善。相比之下,单脉冲成像技术原理清晰,算法简单,且易于工程实现。
本文根据单脉冲技术[2]的测角原理,结合距离高分辨技术,对目标在静止和运动时的前视成像情况进行了分析。验证了在不同情况下,单脉冲前视成像的可行性。
1 单脉冲测角
单脉冲技术通过比较一次脉冲回波的和、差信号信息对目标的角度进行测量。

图1 振幅法单脉冲测角原理图
如图1所示,每个脉冲均采用两个相同且彼此部分重叠的波束,若目标处在等信号轴线的方向上,则由两波束收到的信号强度相等,否则一个波束的回波信号强度将高于另一个。因此,只需要比较两个波束回波的强弱便可判断目标偏离等信号轴的方向及大小[3]。假定两个波束的方向性函数均为F(θ),接收到两波束的信号电压振幅为E1、E2,设两波束相对天线轴线的偏角为δ,则对于偏离天线轴线θ角方向的目标,其和信号振幅表达式为

差信号振幅表达式为

现假定目标的误差角为ε,由于在跟踪状态下,ε较小,故将FΔ(ε)在0处展开成泰勒级数并忽略高次项,可得

可看出,在一定误差范围内,差信号的振幅大小表明了目标误差角的大小,其相位则表明了目标偏离天线轴的方向,而与信号的相位和目标偏向无关[4-5],所以一般用和信号作为相位基准,并利用差信号与和信号的比值来鉴别目标偏离天线轴线的方向。典型的和差信号方向图如图2所示,其中,两波束方向轴夹角为0.2 rad。
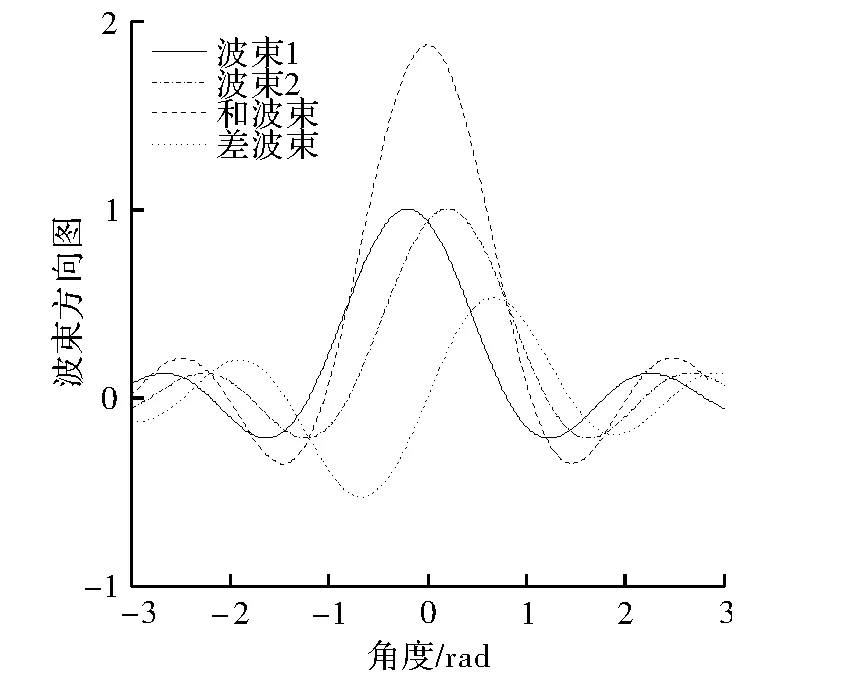
图2 典型单脉冲和差波束方向图
单脉冲体制雷达中,系统的方位分辨率主要取决于接收天线的波束宽度。对于远距离目标,雷达波束宽度通常大于目标形体对雷达的张角,这时要依靠雷达的角分辨率来区分目标的各组成部分是很困难的。单脉冲成像主要依靠距离高分辨性将目标不同散射点进行分离,然后对各散射点分别测角,从而实现对同一雷达波束内不同高分辨距离单元的不同散射点进行分离和定位。同时结合目标的一维距离像,便可获取各散射点的坐标信息,并根据和通道信号的幅度获得相应像素点的灰度值描点成像,从而获得单一波束照射区域内的目标各组成部分雷达特性图像。
单脉冲成像技术可测得目标在实波束中的精确位置。因此,将其应用于雷达对地面的成像处理中可显著改善图像质量。即运用该种技术,不仅能够显著提高实波束成像图中较多特征目标的清晰度,且能够提高其方位位置的精确度。同时这种改善不依赖于目标的多普勒频率,故可实现SAR、DBS等技术难以实现的前视图像效果的改善,且具有算法简单、成像时间短的特点。
2 成像分析
设雷达发射的脉冲压缩信号为s(t),在探测区域存在N个目标,每个目标的后向散射系数为σn,方位角为θn,目标距雷达的距离为Rn,天线的转速为ω,轴线方向为α。
根据给出的条件可知,目标回波延迟时间Δtn=,这段时间内,天线转过的角度为Δα=ωΔt,当天nn线发射波束时,目标与天线轴线夹角为θn-α。而当接收回波时,目标与天线轴线夹角为θn-α+Δαn,此时接收到的和差信号为
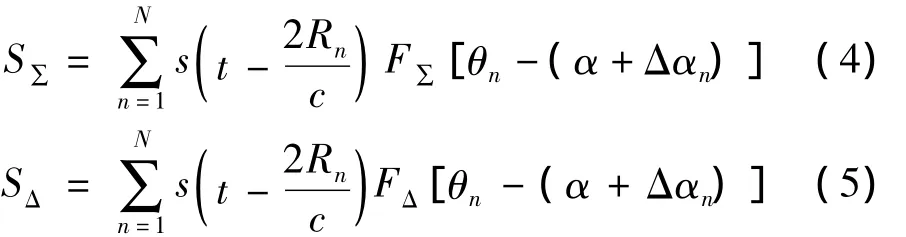
根据前面的推导,可较容易求出每个目标偏离天线轴线的角度。
当测量目标的俯仰角时,由于同一天线的方向图是固定的,因此测量目标俯仰角的方式和测量目标方位角的方式并无区别。
实际应用中,目标可能具有一定的速度,弹体也一定是向前运动的。对于运动的目标和弹体,文中可在方位维度上以弹体为原点建立极坐标系,并将目标相对于弹体的运动速度v分解为切向速度vt和径向速度vr。
当目标只有切向速度时,目标与弹体间距离R保持不变,在目标回波延迟时间Δtn内,目标相对天线转过的角度为 Δα'=,这等效于改变了天线的旋转n速度,因此天线接收到的和差波束变为
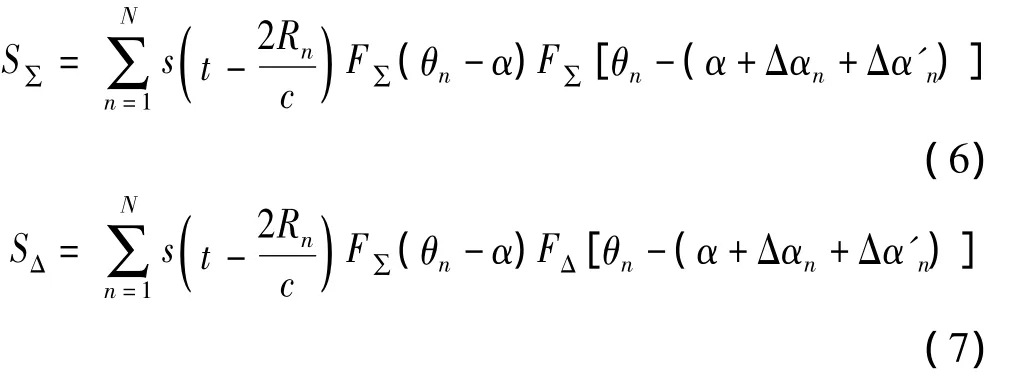
当目标只有径向运动时,弹目距离发生变化,而目标和天线轴线夹角不发生变化。此时接收到的和差信号表达式变为

由表达式可看出,这种运动状态下,回波的和差信号幅度发生变化,而误差角与差波束间的线性关系并未发生变化,而若以SΔ/S∑测量误差角时,和差信号幅度的变化并不会影响该方法的测角精度。
3 测角仿真
假定目标的分布如图3所示。
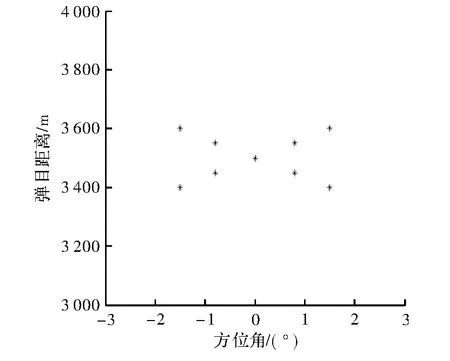
图3 仿真目标方位分布图
天线波束宽度为3°,天线扫描时转速为30°/s,此时静止目标所成的距离-方位像如图4所示。

图4 目标静止时单脉冲与实波束方位角成像图
图4(a)为单脉冲成像图,图4(b)为实波束成像图。由此可看出,在多个目标间距离小到一定程度时,实波束成像已无法完全区分多个目标,而此时单脉冲成像仍能较好地区分距离近处的多个目标。即与传统的实波束成像相比,单脉冲成像方式实现了波束锐化,同时角分辨率也得到了一定程度的提高。
当目标以30 m/s的速度作切向运动时,成像仿真如图5所示。
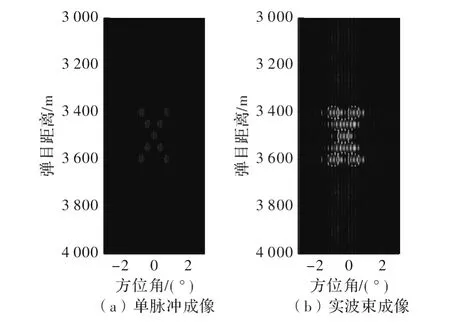
图5 目标具有30 m/s的切向速度时单脉冲与实波束方位角成像比较
通过对比图4和图5可知,目标的切向运动对成像的影响并不明显。这也印证了前面的分析。
4 结束语
通过仿真可看出,在雷达的实际使用中,单脉冲测角可较精确的得出目标方位角和俯仰角。因此在已知弹目距离的情况下,通过该成像方式,可容易确定目标在空间的确切位置。在实际应用中,需同时确定目标方位角和俯仰角的大小,因此实际天线发射的脉冲是由4个对称且相互部分重叠的波束构成。其4个波束分别占据4个象限[6],接收回波后,再进行和差处理,即可同时测量出目标的方位角和俯仰角。
由于单脉冲成像方式与视角无关,能够对任意视角进行成像,弥补了SAR和DBS成像的前视盲区。同时,和实波束成像方式相比,其角分辨率也有一定的提高,且成像算法的运算量较小,工程实用性高。
[1]李悦丽,梁甸农,黄晓涛.一种单脉冲雷达多通道解卷积成像方法[J].信号处理,2007(5):699-703.
[2]吴迪,朱岱寅,朱兆达.机载雷达单脉冲前视成像算法[J].中国图象图形学报,2010(3):462 -469.
[3]贺林峰.单脉冲成像[D].武汉:华中科技大学,2008
[4]丁鹭飞,耿富录,陈建春.雷达原理[M].4版.北京:电子工业出版社,2009.
[5]张明友,汪学刚.雷达系统[M].3版.北京:电子工业出版社,2011.
[6]雷璐.基于单脉冲测角技术的雷达高分辨三维成像方法研究[J].科技创新导报,2010(9):4-5.
[7]孙富君,陶建锋,孙宏伟.单脉冲雷达的角度跟踪干扰研究[J].现代雷达,2004,26(1):17 -18,36.
[8]姜玮华,刘波,邢孟道.基于FPGA雷达成像方位脉冲压缩系统的设计[J].电子科技,2009,22(10):36 -39.