基于SIFT特征匹配算法的目标跟踪及视频采集与传输研究
2014-12-14刘嘉敏熊海涵余月华周冬芹
汪 鑫,刘嘉敏,李 敏,熊海涵,余月华,周冬芹
(1.重庆大学城市科技学院电气信息学院,重庆 402167;2.重庆大学光电工程学院,重庆 400000)
当今社会,视频应用研究在各个领域都发挥着重大的作用。在军事研究、野外环境监测、环境监测与预报、交通管制、智能家居、公共安全监测等方面都需要对视频进行采集[1-6]。除此以外,还希望对某些特定的目标信息能不间断地进行跟踪,例如长时间监控某个人或者物体。因此,在对视频图像进行采集时,希望能完成对目标信息的跟踪。对于目标检测,以往都采用图像差减法、目标二值化块处理法、矩形框表示法[6],但是这些方法都无法清晰、完整地分割出目标信息。
随着无线传感网络的发展,大量的信息都借助于无线传感网络进行传输。因此,本文主要采用一种基于SIFT特征匹配算法的目标跟踪方法对视频进行采集[5],通过无线传感网络对信息进行传输。
1 SIFT特征匹配算法
SIFT特征描述是一种提取局部特征的算法,其思想是把图像之间的匹配转化为特征点向量间的相似性度量[7]。SIFT特征描述分为3个阶段:SIFT特征点的检测、SIFT特征描述符的生产及SIFT特征向量的匹配,如图1所示。
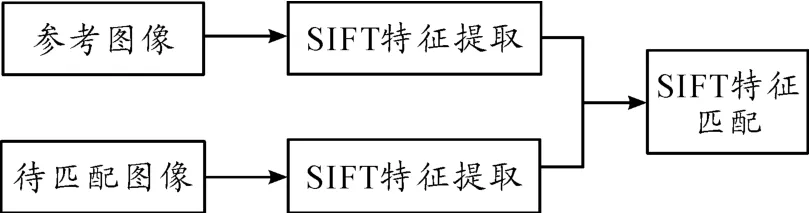
图1 SIFT特征描述
1.1 构建DoG尺度空间
要从图像中检测出对图像的尺度变化具有不变性的视觉特征,就要构建尺度空间。图像在尺度空间中表示为图像和可变高斯核函数的卷积,采用高斯金字塔算子表示:

式(1)中:I(x,y)是输入的图像;G(x,y,σ)是二维高斯函数,如式(2)所示。

其中σ为尺度因子。
1.2 SIFT特征点检测
在尺度空间中,特征点就是DoG尺度空间内的局部极值点,在进行极值点检测后就可以初步确定特征点的位置和所在尺度。对输入图像I(x,y)和高斯函数 G(x,y,σ)进行卷积,生成对应的尺度空间 L(x,y,σ),用高斯金字塔表示;将高斯金字塔的相邻两层相减,生成高斯差分金字塔D(x,y,σ);在高斯差分金字塔中,检测同层3×3邻域和相邻层3×3邻域内的极值点。这样就可以得到具有尺度不变性的特征点[8]。
1.3 特征描述子计算
特征描述子就是图像特征向量,采用向量的形式来准确描述图像自身的特征。将坐标轴旋转到关键点的主方向,确保旋转不变性,再依据关键点尺度选取高斯图像,按式(3)和式(4)计算以关键点为中点的16×16的窗口内所有像素点的梯度模值和梯度方向。每一小格表示关键点邻域所在尺度空间的一个像素。
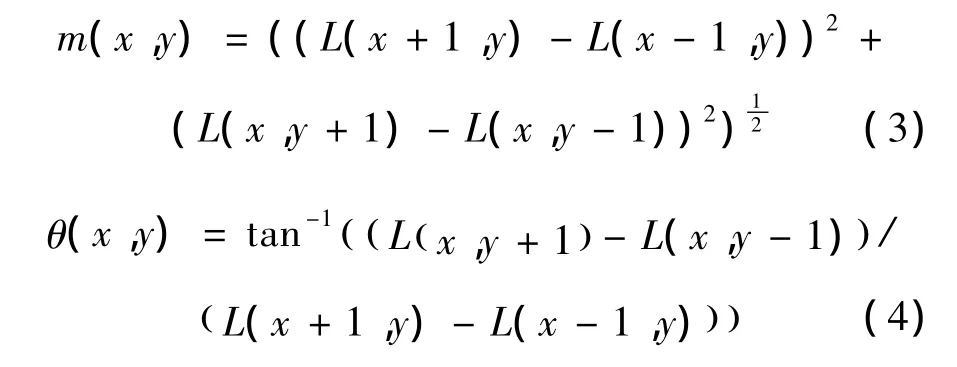

梯度方向直方图统计公式为:

式(6)中:ck为方向柱的中心;Δk为方向柱的宽度;(x,y)为子块r(l,m)像素点的坐标。最终形成的128维的向量就是SIFT特征描述符子[9]。
1.4 特征点匹配
参考图像和待匹配图像的SIFT特征向量生成后,利用特征向量的欧式距离作为两幅图像特征点的相似性判定度量。采用欧式距离的最小值作为匹配成功的判定标准是非常简单且常见的。
2 视频采集系统硬件研究
无线传感网络视频采集系统由视频采集模块、微处理器模块、无线通信模块3个部分组成。视频采集模块的主要功能是实现对视频图像的采集和数模转换;微处理器模块的功能是负责对整个系统的控制;无线通信模块的功能是将采集、处理后的视频信息通过无线传感网络传输出去。
2.1 视频采集模块
视频采集模块是一个非常重要的部分。本文采用的是一款低电压、低功耗的CMOS传感器OV7640,它通过 SCCB(seril camera control bus)接口来实现对器件的控制,支持VGA、CIF等各种尺寸的视频格式。视频采集模块主要由图像传感器OV7640、压缩芯片OV528、存储芯片24LC64和降压芯片MIC5207构成的摄像头系统来对图像信息进行采集[10]。
OV7640的电路原理如图2所示。Y0~Y7引脚连接的是CV528图像压缩芯片,它将采集的图像信息进行压缩,电路如图3所示。
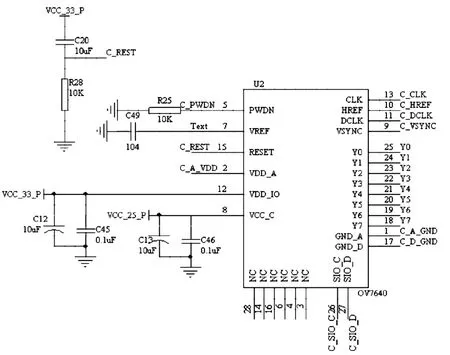
图2 OV7640电路原理
摄像头上电复位后,微处理器模块向OV528发出采集指令,OV528接收到采集指令后通过SCCB控制总线调用初始化程序,摄像头通过OV7640进行视频采集,并将采集的视频图像保存为RGB格式,OV7640将采集的图像信息传给OV528芯片,OV528对其进行图像压缩处理[11-12]。
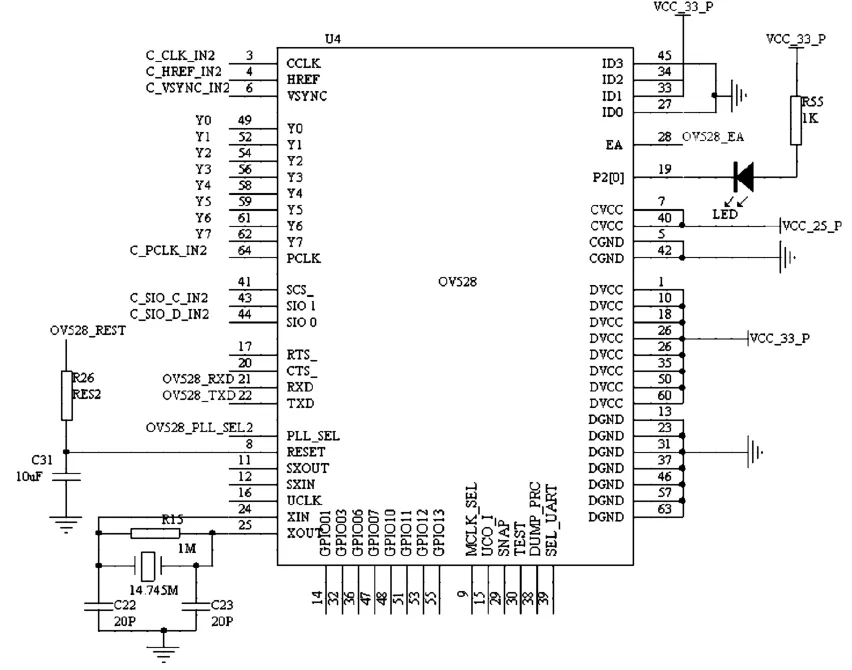
图3 图像压缩芯片OV528
2.2 微处理器模块
本文采用的微处理器是ARM公司的STM32F103。它是一款具有突破性的以Cortex-M3为内核的处理器,具有低功耗、高性能、低电压的特性[13]。
2.3 无线通信模块
本文采用NRF24L01器件进行无线传输。它是一款应用于无线通信的通信芯片,采用GFKS调制技术,基于SW-ARQ协议,能实现点对点或者点对多(最多1对6)的无线通信,通信速率可达2M[14]。

图4 无线通信模块NRF24L01
NRF24L01无线通信模块与STM32微处理器之间的通信通过SPI协议进行。STM32微处理器内部具有SPI通信接口,可以直接与NRF24L01进行连接,电路如图5所示。
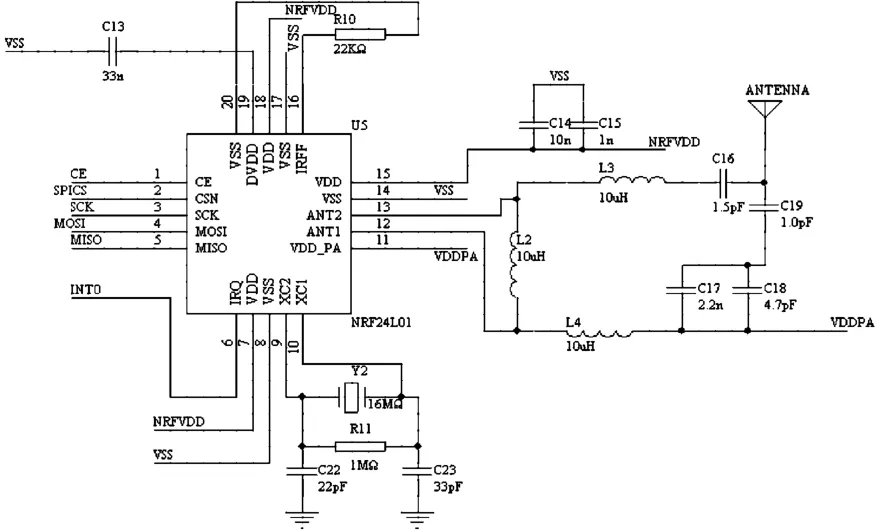
图5 NRF24L01电路
系统上电后,STM32初始化,并对外部设备进行初始化,然后进入休眠状态等待触发信号。只要收到用户端的控制信号,系统就进入工作模式,摄像头开始采集数据,并将采集的数据送回微处理器。一帧图像采集完成后,微处理器将采集的数据存入图像缓冲区,同时激活无线射频模块,开始数据无线传输。采集端无线传感器节点流程如图6 所示[15-16]。
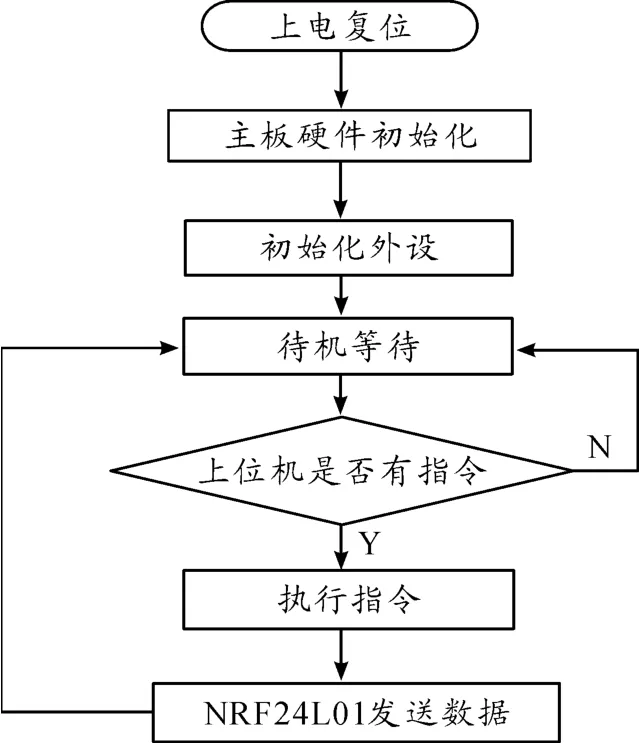
图6 采集端无线传感器节点流程
考虑到数据采集端数据采集的复杂度,所以采用的微处理器是STM32。对于接收端的传感器节点,采用单片机作为微处理器[17]。51单片机与NRF24L01的连接如图7所示。
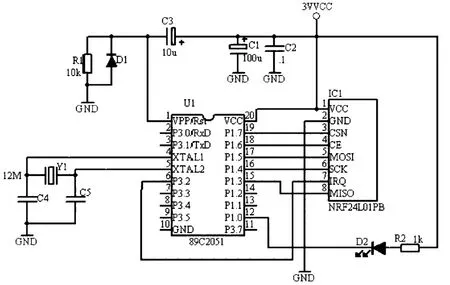
图7 接收端无线传感器节点电路
接收端无线通信模块NRF24L01的流程如图8所示。
3 实验与结果
运用SIFT特征匹配算法,对单目标下运动目标进行采集分析。实验运行环境为Intel Dual 1.8GHz CPU,2G内存,通过Matlab运行实现。应用SIFT算法构建DoG尺度空间、特征点检测、特征描述子计算以及特征点匹配,将参考图像和待匹配图像进行SIFT匹配;利用帧间的差分信息确定目标运动区域,通过SIFT特征点区域的变化来更新背景,对历史帧进行匹配更新,保留SIFT特征匹配点,去掉不属于特征点的区域。对运动汽车的跟踪分析实验结果证明:该算法对运动的目标物体有很好的匹配跟踪效果(见图9)。
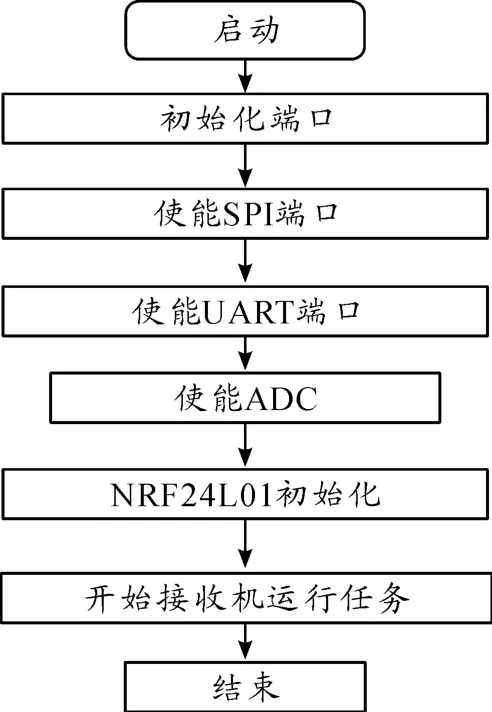
图8 接收端无线传感器节点流程
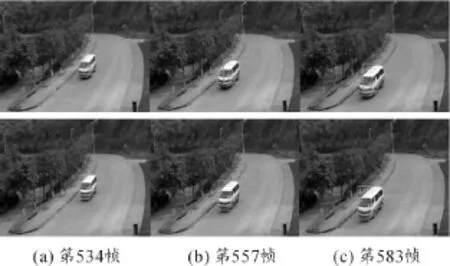
图9 运动汽车跟踪分析
4 结束语
针对复杂环境下的目标跟踪,本文提出了利用SIFT匹配算法来有效提取运动目标并进行目标跟踪,通过SIFT特征点坐标的非负差分的方法来确定运动目标区域。该方法对运动目标进行了高效率匹配,同时设计出实现目标跟踪视频采集的硬件电路,并通过NRF24L01无线通信模块将采集的目标信息进行无线传输。实验结果表明:该算法在复杂背景环境下对运动目标有较好的跟踪效果。
[1]孙利民,李建中,陈渝,等.无线传感器网络[M].北京:清华大学出版社,2005:3-4.
[2]林伟,卿辉,陈文,等.基于新型电源供电的无线传感网络节点设计[J].压电与声光,2011(3):498-500,508.
[3]An-tonio-Javier Gorcia-Sanchez.Wireless sensor networks deployment for monitoring wildlife passages[J].Sensors,2010(10):7236-7262.
[4]王焱,单欣欣,姜伟,等.无线传感网络坏点识别研究与应用[J]. 压电与声光,2012(3):452-455,458.
[5]Holman R,Stanley J,Ozkan-Haller T.Applying video sensor networks to near shore environment monitoring[J].IEEE Tans.On Pervasive Computing,2003,2(4):14-21.
[6]刘建军,夏胜平,郁文贤.基于SIFT特征的两个阶段procrustes迭代匹配算法[J].信号处理,2010(6):854-858.
[7]韦虎,张丽艳,刘胜兰,等.基于SIFT图像特征匹配的多视角深度图配准算法[J].计算机辅助设计与图形学学报,2010,22(4):654-661.
[8]牛长峰,陈登峰,刘玉树.基于SIFT特征和粒子滤波的目标跟踪算法[J].机器人,2010,32(2):241-247.
[9]陈雷.JPEG图像压缩技术及仿真实现[J].中国科技信息,2011(17):91-92.
[10]王永虹,徐炜,郝立平.STM32系列ARM Cortex-M3微控制器原理与实践[M].北京:北京航空航天大学出版社,2008.
[11]广州周立功单片机发展有限公司.ARM Cortex-M3处理器简介[Z].2006,10.
[12]王虎升,李金环.基于STM32的嵌入式语音播报系统设计[J].北京联合大学学报,2011(3):11-15.
[13]陈慧敏,栗苹,张英文,等.CMOS图像传感器的研究新进展[J].半导体光电,2006,27(6):664-667.
[14]何兆红,王高.CMOS图像传感器的最新发展状况[J].光机电信息,2002(12):14-16.
[15]Lee B,Wu H.Study on Back off Algorithm for IEEE 802.15.4 LR-WPAN[C]//IEEE International Conference on Advanced Information Networking and Applications.Japan:[s.n.],403-409.
[16]Mehta V,Sheng W,Chen T,et al.Development and Calibration of a Low Cost Wireless Camera Sensor Network[C]//IEEE International Conference on Intelligent Robots and Systems.USA:[s.n.],2009:110-115.
[17]Lee D,Lee J,Lee Y,et al.Low-Complexity Aggregation of Collected Images with correlated Fields of view in Wireless Sensor Networks[Z].IEEE Symposium on Computers and communications.2010:765-771.