星体跟踪器测试系统中星模拟器的标定
2014-12-13李宁黄堃
李宁 黄堃
(陕西凌云电器集团有限公司,陕西宝鸡 721006)
星体跟踪器测试系统中星模拟器的标定
李宁 黄堃
(陕西凌云电器集团有限公司,陕西宝鸡 721006)
本文对星体跟踪器测试系统中主要组成部分星模拟器的组成及建立作了说明,详细介绍了星模拟器的标定,并对标定结果进行误差分析。分析结果表明,本文星模拟器标定结果满足星体跟踪器测试要求。
星模拟器 平行光管 标定
星体跟踪器是航天飞行器中广泛采用的一种高精度、高可靠性的姿态测量器件。在星体跟踪器测试系统中,需要星模拟器,以给出星体跟踪器所需的星光输入信号[1]。
1 引言
星模拟器的实质是一个平行光管,在焦面位置放置星点板,经光源照射后,星点板就可以通过平行光管成像到无穷远来模拟星图,在光源前放置不同的中性滤光片可实现对不同星等的模拟,放置带通滤光片实现对恒星光谱的模拟。这种星模拟器的结构简单,没有实时性要求,但对单星张角、星点位置和星等的模拟精度要求很高[2]。
本文涉及的星体跟踪器测试系统由星模拟器、高精度双轴转台、定位守时模块、控制计算机等组成。该系统用于星体跟踪器动静态精度测试,为完成测试功能,本文设计的星模拟器每颗星的高低、方位角的位置精度应小于2″。
2 星模拟器组成及建立
星模拟器由平行光管及固定座组成,平行光管主要由准直物镜组件、星点分划板组件、滤光片组件及光源组成,它用来模拟恒星发出一定角度的平行光,可以模拟星空星等、位置和星数。星模拟器的建立应满足以下几个条件:
(1)星模拟器应在一定的星等范围之内亮度变化。星等范围由星体跟踪器光学系统的敏感特性决定的。(2)任意两颗导航星之间的角距都大于一定的门限(实际约为2°~4°),这是因为相邻太近的导航星对定位无太大益处。
本文设计的星体跟踪器测试系统采用四组星模拟器,每组星模拟器有5个平行光管,单组星模拟器如图1所示。四组星模拟器以二维转台及星体跟踪器的转轴交点为中心,沿方位圆周上等间隔分布,示意图如图2所示。
每组模拟器设置五个模拟星点,且不同星点之间通过角距特征的变化来进行区分。因此,五个星点可根据需要进行不同角度及位置分布。本文采用中心一颗为基准,周围四颗成不等角度分布的方案。周围四个星点与中心星点夹角为3°左右。周围四个星点孔径中心之间的夹角均为90°左右。为适应星体跟踪器的工作范围,每一组星体模拟器的中心星模拟器的光轴与水平面的夹角在-24°左右。
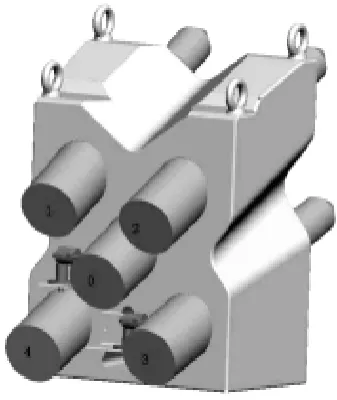
图1 星模拟器

图2 星模拟器布置示意图
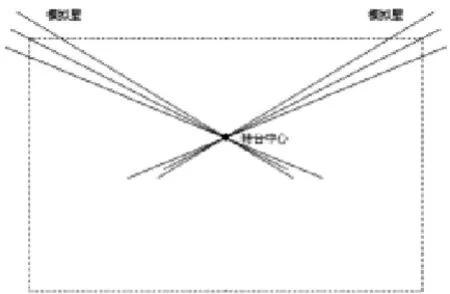
图3 模拟星空对角线剖面图
3 模拟星位置标定
模拟星位置标定主要使用测量仪器为LeicaTM6100A经纬仪,该经纬仪测量精度为0.5″。标定过程:经纬仪调至水平位置,利用陀螺经纬仪测出经纬仪方位零位相对正北方向的夹角,从而得到地理坐标系;经纬仪精确测出每颗模拟恒星在地理坐标下的位置。在本文涉及的星体跟踪器测试系统中,平行光管模拟无穷远星点,因此,对出射光的平行性要求很高,安装平行光管时首先将经纬仪调焦至无穷远,然后对准平行光管观察,可以看到一个光点,当星点板离焦时,光点较模糊,此时可前后移动星点板,当观察到星点具有最佳聚焦时,说明星点板已经调整到焦面位置。此时经纬仪放置转台中心位置。模拟星空对角线剖面图如图3所示。
根据模拟星的空间分布,只要将经纬仪置于转台中心处,就可以通过转动观察到所有的模拟星,可通过正倒镜多次测量得到稳定的测量值。标定过程:经纬仪调至水平位置,利用陀螺经纬仪测出经纬仪方位零位相对正北方向的夹角,从而得到地理坐标系;经纬仪精确测出每颗模拟恒星在地理坐标下的高低角、方位角位置。
4 误差分析
由于测量误差具有随机性,角度测量值每次会略有差异,这个随机波动即是角度测量精度的反映,而测量值与真实值的差异呈现出一定的概率分布规律,对于多数情况,通常认为误差是一正态分布的随机变量,因此对于测量精度而言,通常也是采用统计的方法进行分析。
(1)经纬仪调平误差;经纬仪需要放在正确位置并调整到水平状态,取调整误差为1δ=1″。(2)正北方向定位误差;利用经纬仪确定正北方向时,由于经纬仪的测量误差而使星点位置定位基准存在偏差,该偏差即经纬仪的测量误差为δ2=0.5″。(3)瞄准误差;经纬仪的瞄准即望远镜分划标志与平行光管星点像的细节重合的程度,即人眼判断重合了实际没有重合而存在一定的差值。人眼瞄准精度与像的清晰度、照度、对比度等因素密切相关,极限对准误差为10″~30″,又经纬仪的望远系统视角放大率为Γ=32,因此,人眼通过经纬仪的瞄准误差为。(4)测量误差;测量误差主要由经纬仪本身的测量精度决定的,采用测量精度为0.5″的经纬仪进行测量,其测量误差即为δ4=0.5″,上述各项误差均为未定系统误差,则星点目标位置标定的综合误差为:

实际上测量误差的各个环节可能叠加,也可能相互抵消,但若进行大量测量,则约有99.7%的概率落在±3Δ之间。
5 结语
对星模拟器的标定结果进行误差分析表明,本文星模拟器标定结果满足星体跟踪器测试要求。
[1]尤太华,冯展军,陈强华,王涛.星敏感器星图模拟和识别算法软件的研究[J].导航与控制,2005(1):22-29.
[2]孙高飞,张国玉,姜会林,郝云彩,高玉军.甚高精度星模拟器设计[J].光学精密工程,2011(8).