船舶管路主动吸振器仿真设计
2014-12-07苗金林孙玉东
王 震,苗金林,孙玉东
(1.中国船舶科学研究中心,江苏 无锡214082;2.中国舰船研究院,北京100085)
0 引 言
船舶系统的3 大噪声源是机械系统噪声、推进器噪声与水动力噪声。根据国外经验,当主动力装置(机械系统的一部分)噪声、推进器噪声得到有效控制后,管道噪声对船舶安静性的影响开始明显[1]。
由泵等引起的管路振动不仅会增强船舶的辐射噪声,减弱船舶的隐蔽性,同时还会造成管道系统的疲劳损伤降低管路设备寿命,严重时会使管道的连接部位发生松动和破裂,影响船舶的安全航行。因此,管道的振动控制,能在一定程度上提高船舶的隐蔽性,增强船舶的战斗力和生命力。然而传统的管道被动减振装置主要针对高频振动,对低频振动的控制效果十分有限。因此需要开发有效的主动振动控制系统减弱管道的低频振动。
国内外的管路主动控制系统主要针对管路噪声和液体压力脉动。美国、英国、瑞典等国的科研人员分别都开发了针对舰船管路系统液体压力脉动的主动控制系统[2-4]。焦宗夏等提出了采用压电陶瓷作为驱动部件设计主动节流阀的思路,以此为主动消振器,通过监测液体流量,当液体流量过大时控制节流阀进行分流从而达到减弱压力脉动的效果[5]。然而,针对管路系统结构振动的主动控制系统在现有文献资料中却鲜有提及。
本文以惯性吸振器作为作动器,设计了一种管路主动吸振器。该系统首先采用基于线性调频Z 变换的频谱细化方法对振动信号的谐频成分进行精细识别,之后采用自适应控制算法进行自动控制,使用Matlab 对控制算法进行了相应的仿真。仿真结果显示,该系统能够将目标频率的振动幅值减小10~25 dB。
1 管道主动吸振器系统模型
惯性吸振器主要由音圈电机等电磁式作动器构成。音圈电机具有体积小、重量轻、高加速度、高速度、响应快、推力均匀等优点[6]。音圈电机按励磁方式可分为永磁励磁式和电磁励磁式2 种。永磁励磁式音圈电机由永磁体产生稳恒磁场,电磁励磁式音圈电机由通电线圈产生交变磁场。永磁励磁式音圈电机和电磁励磁式音圈电机在输出效果上的差别主要是:永磁励磁式音圈电机中线圈与被激结构之间的引力以正弦的方式变化,而电磁励磁式音圈电机以具有直流偏置的正弦方式变化[7]。由于电磁励磁式音圈电机输出的复杂性,因此针对电磁励磁式音圈电机的控制系统较为复杂,本文中采用永磁励磁式音圈电机构成惯性作动器。
永磁励磁式音圈电机按作动部件分类又可分为动铁式和动圈式,动铁式是永磁体与接触物体相接触,而动圈式是线圈与接触物体相接触。动圈式的优点在于:永磁体的质量可以作为惯性吸振器质量块的一部分。惯性吸振器使用的是动圈式音圈电机,这样就可以充分利用永磁体的质量属性造成的共振吸振。图1为动圈式音圈电机的机械结构示意图。图2为惯性吸振器的动力学示意图。

图1 音圈电机结构示意图Fig.1 Sketch for voice coil motor

图2 惯性吸振器动力学示意图Fig.2 Sketch for inertial actuator
惯性吸振器由音圈电机及弹簧构成,二者构成质量弹簧系统。惯性吸振器中音圈电机输出的作动力fl与输入电流il成正比例关系,二者之间的关系式为fl= ψil,ψ为音圈电机的力常数。Cristóbal González Díaz 对惯性吸振器进行建模,给出惯性吸振器的传递函数,对控制性能及稳定性进行了定量描述,并给出了惯性吸振器的几个设计规则。文献[8]中给出了惯性吸振器输出给被控系统的作用力f0与输入给惯性吸振器的电流ia之间的关系:

式中,Za为惯性吸振器输出给弹簧的阻抗;Ya为质量块(含永磁体)的导纳;Ycc为接触点处的被控物体的输入导纳。
惯性吸振器的传递函数的幅频特性曲线和相频特性曲线分别如图3和图4所示。幅频特性曲线中,惯性吸振器的共振频率处存在一个共振峰;相频特性曲线以共振频率处为分界线,惯性吸振器的频率低于共振频率处时,相位约为180°,惯性吸振器的工作频率高于共振频率时,相位约为0°。根据惯性吸振器的幅频特性和相频特性,被控物体的振动频率应当高于惯性吸振器的固有频率,否则在控制中可能出现失稳。

图3 惯性吸振器幅频特性曲线Fig.3 Frequency-amplitude curve of inertial actuator

图4 惯性吸振器相频特性曲线Fig.4 Frequency-phase curve of interial actuator
惯性吸振器的实物如图5所示。为了能够将惯性吸振器安装在管道系统上,设计加工了如图6所示的管道主动吸振器固定装置。

图5 惯性吸振器实物图Fig.5 Inertial actuator
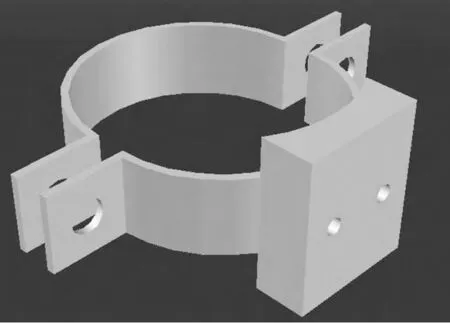
图6 管道主动吸振器固定装置Fig.6 Binding of inertial actutor for pipe
2 自适应控制器设计及分析
S.Kim和Park.Y (1999,2001)研究了将基于跟踪滤波的自适应主动控制算法应用于主动噪声控制中[9-10]。该方法的出发点是对扰动信号中的线谱成分有选择性地进行抑制,首先通过频率实时估计和跟踪滤波获得扰动信号的线谱成分频率值,通过得到的频率值对每个线谱成分进行单独处理。张磊等将该方法应用于主动隔振系统中,并分别进行了数值仿真和实验验证[11-12]。他们使用的频率估计方法存在一定的局限性,系统的采样频率和进行频率估计用到的数据量会影响频率估计的准确性。当被控系统振动信号的频率发生变化时,需要适当调整采样频率或者进行频率估计所使用的数据量,否则会造成频率估计值偏差过大。
本文采用基于线性调频Z 变换的(Chirp-Z Transform,CZT)的频谱细化方法对振动信号进行细致的频率分析,可以得到各谐频成分很精确的频率值。CZT 变换可以对指定频带上的频谱成分进行细化。基于CZT的频谱细化方法具有运算效率高、细化效果好等优点。引入CZT的意义在于,使用CZT可以有效减少单独通过FFT 算法进行频谱分析时的运算量,这将有利于控制算法在实时控制系统中运行。
文献[13]中给出进行CZT 变换的详细步骤如下:
1)确定细化频带范围和输出点数;
2)将细化频带转换为单位圆上的一段圆弧,确定CZT的路径;
3)计算给定路径上的CZT;
4)根据细化频带内频率点位置和CZT的结果,得到相应的细化谱。
控制系统采用自适应控制算法,控制系统框图如图7所示。

图7 自适应控制系统框图Fig.7 Schematic diagram of adaptive control system
图7 中,d(k)为靠近激励源的管端由加速度传感器采集得到的信号,称为参考信号。gi(k),i =1~n为控制器构造的参考信号,是在经过FFT和CZT 进行频谱分析得到准确的频率值之后,通过查表法生成的周期信号。e(k)为误差信号,由靠近惯性吸振器一端的加速度传感器采集得到。H1(z)为信号d(k)由参考信号采集处到误差信号采集处的传输通道的传递函数,H2(z)为吸振器的传递函数,F(z)为带通滤波器组的传递函数,wi(z),i = 1~n表示控制器。
根据图7 可知,被控系统的误差信号e(k)可表示为:

由于本文中只针对扰动信号的几个线频成分进行消除,因此用di(z),i = 1~n为扰动信号中的几个线频成分,式(4)可表示为:

根据式(5)可知,对于每一个控制器,当且仅当满足下式时,系统具有最佳的控制效果。

式(6)中的gi(z),H1(z)和H2(z)已知,di(z)的值未知。因此系统中需要对di(z)设定一个初值,然后对wi(z)进行自适应滤波,使其取得理想的控制效果。对每一个控制器,取代价函数为Ji(k)=(k),i = 1~n,根据LMS 算法的基本原理,均方误差性能函数的梯度向量为:

控制器的系数更新过程为

将式(7)代入式(8)可得

其中,ρi(k)为gi(k)经过H2(z)之后的响应,μ >0。
3 数值仿真
假设管道系统中存在的振动信号由中心频率为34.15 Hz,68.30 Hz,102.45 Hz和136.6 Hz的正弦波和高斯白噪声组成,正弦波成分与高斯白噪声的信噪比为20 dB,采样频率fs为512 Hz。
当对该振动信号进行128 阶的快速傅里叶变换时,频率分辨率约为4 Hz,FFT 变换得到的结果存在0~2 Hz的误差,由于存在的误差较大,最终在实验中会导致自适应控制算法效果不佳。当对之前获得的FFT变换的频谱信息中的一小段进行CZT 变换之后能够得到振动信号更详细的信息。取128 阶FFT 变换结果中的连续的3个频率点之间的信息进行变换,进行64 阶的CZT 变换,变换结果的频率分辨率约为0.125 Hz,变换结果存在的误差小于0.0625 Hz。
对之前假设的振动信号进行FFT 变换,得到的频谱图如图8所示。取FFT 变换结果中的第2个谐振峰进行频谱细化,细化结果如图9所示。从图7 可以看到,进行FFT 变换之后得到的第2个谐振峰的频率为66.41 Hz,与实际值68.3 Hz 相差约1.9 Hz。基于CZT 变换的频谱细化结果中算的第2个谐振峰的频率为68.2 Hz,与实际值68.3 Hz 相差约0.1 Hz。由此可以看出基于CZT的频谱细化方法能够更精确的确定谐振峰的频率值。表1为经过FFT 变换及CZT 变换获得的各阶谐振频率值。

图8 FFT 计算得到的加速度信号幅值谱Fig.8 Acceleration frequency spectrum by FFT

图9 基于CZT的频谱细化结果Fig.9 Acceleration frequency spectrum by CZT
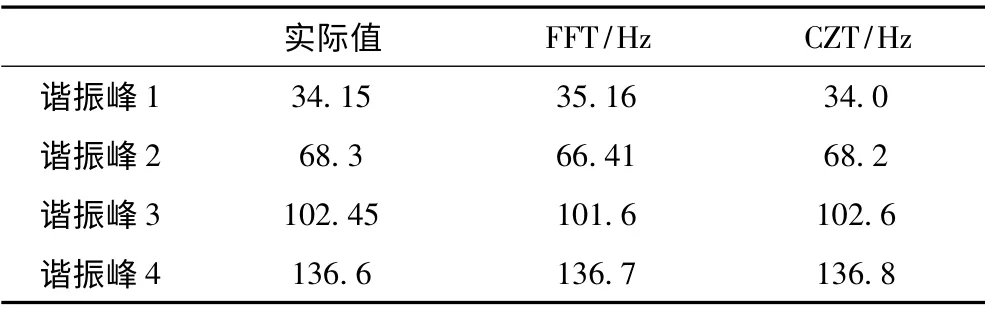
表1 FFT和CZT 所得谐振峰频率值Tab.1 Harmonic frequency analysed by FFT/CZT

图10 控制前和控制后振动信号的时域波形Fig.10 Time-amplitude curve of vibration signal before and after control in time domain

图11 控制前和控制后振动信号的频谱图Fig.11 Frequency-amplitude curve of vibration signal before and after control
图10为控制前和控制后振动信号的时域波形,从图中可以看出,控制后振动信号的幅度显著削弱了。图11为控制前后振动信号的频谱图。从图中可以看出,4个谐频成分都显著地削弱。控制后谐振峰幅值下降10~25 dB。
4 结 语
针对船舶管道系统具有较强线谱成分的结构振动,本文提出了一种基于惯性作动器的管道主动吸振器,采用自适应控制算法,对管道结构振动中每一需要控制的线谱成分进行单独控制。首先,给出了惯性吸振器的构成、主要分类、动态特性和传输函数。随后介绍了基于FFT和CZT的频谱细化算法以及自适应控制算法。最后使用Matlab 进行仿真,仿真结果表明,该方法能够显著地削弱结构振动中较强的线谱成分,控制效果达到10~25 dB。
[1]尹志勇,钟荣,刘忠族.管路系统振动噪声控制技术研究现状与展望[J].舰船科学技术,2006,28(z2):23-29.YIN Zhi-yong,ZHONG Rong,LIU Zhong-zu.Current situation and trends on the study of noise and vibration control technology in pipeline systems[J].Ship Science and Technology,2006,28(z2):23-29.
[2]SATISH C K.Active,passive and active/passive control techniques for reduction of vibration power flow in fluid filled pipes[D].Blacksburg,Virginia Polytechnic Institute and State University,2000.
[3]王艳林,王自东,宋卓婓,等.潜艇管路系统振动噪声控制技术的现状与发展[J].舰船科学技术,2008,30(12):34-38.WANG Yan-lin,WANG Zi-dong,SONG Zhuo-fei,et al.Review of vibration and noise control technology in piping system for submarines[J].Ship Science and Technology,2008,30(6):34-38.
[4]JULIEN P M,THOMAS L L,CHRIS R F.Fluid wave actuator for the active control of hydraulic pulsations in piping system[C].Proceedings of the 17thInternational Modal Analysis Conference,1999:1806-1812.
[5]焦宗夏,陈平,华清,等.液压能源管路系统振动主动控制的理论研究[J].北京航空航天大学学报,2002,28(4):465-469.JIAO Zong-xia,CHEN Ping,HUA Qing,et al.Theoretical study on vibration active control of power supply and pipeline systems[J].Journal of Beijing University of Aeronautics and Astronautics,2002,28(4):465-469.
[6]陈照波,吕俊超,焦映厚.音圈电机驱动的双层主动隔振系统设计与仿真[J].噪声与振动控制,2012(5):26-30.CHEN Zhao-bo,LV Jun-chao,JIAO Ying-hou.Design and simulation of double-stage active vibration isolation system based on voice coil motor[J].Noise and Vibration Control,2012(5):26-30.
[7]C.H.汉森,S.D.斯奈德.噪声和振动的主动控制[M].北京:科学出版社,2002:885-886.HANSON C H,SNYDER S D.Active control of noise and vibration[M].Beijing:Science Press,2002:885-886.
[8]CRISTOBAL G D,CHRISTOPHE P,PAOLO G.Active damping control unit using a small proof mass electrodynamics actuator[J].J.Acoust.Soc.Am.124(2):886-897.
[9]KIM S,PARK Y.Active control of multi-tonal noise with reference generator based on on-line frequency estimation[J].Journal of Sound and Vibration,1997,227(3):647-666.
[10]KIM S,PARK Y.On-line fundamental frequency tracking method for harmonic signal and application to ANC[J].Journal of Sound and Vibration,2001,241(4):681-691.
[11]张磊,刘永光,付永领,等.基于自适应陷波器的主动隔振仿真研究[J].系统仿真学报,2005,17(1):234-237.ZHANG Lei,LIU Yong-guang,FU Yong-ling,et al.Study on simulation of AVI based on adaptive notch filter[J].Journal of System Simulation,2005,17(1):234-237.
[12]张志谊,王俊芳,周建鹏,等.基于跟踪滤波的自适应振动控制[J].振动与冲击,2009,28(2):64-67.ZHANG Zhi-yi,WANG Jun-fang,ZHOU Jian-peng,et al.Adaptive vibration control with tracking filters[J].Journal of Vibration and Shock,2009,28(2):64-67.
[13]樊新海,曾永祥,张丽霞,等.基于CZT的频谱细化算法及应用[J].装甲兵工程学院学报,2012,26(1):59-62.FAN Xin-hai,ZENG Yong-xiang,ZHANG Li-xia,et al.Algorithm and application of spectrum zoom based on chirp Z transform[J].Journal of Academy of Armored Force Engineering,2012,26(1):59-62.
