主动悬架与主动横向稳定杆的集成控制
2014-12-05吕绪宁张文超
周 兵 吕绪宁 范 璐 张文超
湖南大学汽车车身先进设计制造国家重点实验室,长沙,410082
0 引言
如何综合提高车辆行驶时的操纵稳定性、行驶平顺性和主动安全性一直是汽车设计人员的研究重点,为提高汽车的平顺性和操纵稳定性,ESP(electric stability program)、ASS(active suspension system)、ARC(active roll control)等各种动力学控制系统[1-2]得到了深入的研究和广泛的应用。现代汽车为解决舒适性和操纵稳定性之间的矛盾,通常在汽车上加装横向稳定杆。被动横向稳定杆无法实时调整侧倾角刚度,导致高速转向时车辆侧倾过大,使驾驶员容易产生疲劳和不安全感。
国内外学者采用多种控制方法对悬架进行控制,以提升汽车的行驶平顺性,文献[3]运用变参数控制来设计研究半主动悬架,文献[4-5]分别使用线性控制、模糊控制和多目标控制来对主动悬架进行研究。主动悬架与EPS等系统的集成控制[6-7]、基于主动横向稳定杆的主动侧倾控制[8-12]也成为研究热点,其中,文献[8-9]分别采用模糊PID控制和前馈、反馈控制来设计研究主动横向稳定杆,文献[11-12]研究了商用车的主动防侧倾控制。为了验证主动悬架和主动横向稳定杆在实际应用中的有效性和可行性,国内外学者进行了相关研究和样车试验。文献[6]建立了包含主动悬架作动器的试验台,并进行了硬件在环台架试验。文献[13]将含有电机驱动执行器的主动横向稳定杆安装在SUV样车的前后轴上,给出了硬件的实现方法和约束条件,并进行了样车试验。
目前,基于主动悬架和主动横向稳定杆的集成控制研究很少,本文综合考虑汽车行驶平顺性与操纵稳定性,特别是汽车的防侧倾性能,对主动悬架和主动横向稳定杆两个系统进行集成控制。为实现该系统的集成控制,本文建立了某款汽车的整车数学模型[14]并在 MATLAB/Simulink软件中搭建仿真模型,分别设计了主动悬架和主动横向稳定杆的控制器,进行了转向工况下的仿真分析。
1 系统模型的建立
1.1 车辆坐标系的建立
以车体侧倾中心为坐标原点,车体前进方向为X轴的正方向,水平面内X轴逆时针旋转90°得到的方向为Y轴正方向,竖直向上的方向为Z轴正方向,分别绕X、Y、Z轴逆时针旋转的方向为车体侧倾、俯仰、横摆的正方向。
1.2 整车模型
依据上述坐标系,建立包括4个车轮垂向运动,车身垂向、侧向运动以及车身俯仰、侧倾与横摆运动的整车九自由度动力学模型(包括转向运动、俯仰运动和侧倾运动的模型),如图1~图3所示。

图1 转向运动模型

图2 俯仰运动模型

图3 侧倾运动模型
俯仰运动模型:


侧倾运动模型:

车身横摆运动模型:

转向运动模型:

车身垂直运动模型:

轮胎垂直运动模型:

车身与悬架连接点位置约束方程:

式中,a、b分别为前后轮到质心的距离;Manti为主动横向稳定杆主动控制力矩;v为汽车行驶速度;g为重力加速度;m、ms、m1i分别为整车质量、簧载质量和轮i处的非簧载质量;Ix、Iy、Iz分别为车身侧倾、俯仰和横摆的转动惯量;β为质心侧偏角;ωr为横摆角速度;θ、φ分别为车身的俯仰角和侧倾角;d为1/2轮距;h为侧倾中心高度;K2i、C2i分别为轮胎i(i=1,2,3,4)处悬架的刚度和阻尼;Kaf、Kar分别为前后轴被动横向稳定杆的角刚度;Zs为车身垂向位移;Z2i为轮胎i处悬架与车身连接点的位移;Z1i为轮胎i的位移;Z0i为轮胎i处的路面位移输入;fi为轮胎i处主动悬架作动器的作用力;Fic为轮胎i的侧偏力。
当车身俯仰角θ和侧倾角φ在较小的范围内时,近似有

1.3 轮胎模型
轮胎是汽车的重要部件,其结构参数和力学特性决定着汽车的主要行驶性能。但由于轮胎结构的复杂性和力学性能的非线性,为了研究方便,忽略轮胎由载荷变化引起的轮胎特性变化及轮胎回正力矩的作用,在小转角的条件下,将轮胎变形简化为线性变形,则可以得到轮胎垂直载荷和侧偏力:


式中,δ为前轮转角;K1i、C1i分别为轮胎i的轮胎刚度和轮胎阻尼;Ki、αi分别为轮胎i的侧偏刚度和侧偏角;Ef、Er分别为车身的前后侧倾转向系数。
1.4 路面模型
本文将滤波白噪声作为路面的输入模型[15]:

式中,G0为路面不平度系数;w(t)为均值为0的Gauss白噪声;n0为标准空间频率,n0=0.1m-1;f0为下截止频率,f0=0.01Hz。
整车模型中,左右轮胎路面输入激励在时域内互不相干,前后轮胎存在因为轴距而引起的时间延迟。
2 集成控制器的设计
汽车车身的主要性能参数有车身垂直加速度、车身侧倾角与俯仰角、横摆角速度和质心侧偏角等,本文主要优化的性能参数包括车身加速度、车身侧倾角和俯仰角。本文将车身垂向加速度与车身俯仰角作为主动悬架的优化目标,将车身侧倾角作为主动横向稳定杆的优化目标。集成了主动悬架与主动横向稳定杆的控制原理如图4所示。

图4 ASS与主动横向稳定杆集成控制框图
2.1 主动悬架控制策略
本文采用线性控制器和PID协调控制器对ASS进行控制,ASS控制原理如图5所示 。
主动悬架作用力由线性控制力和附加作用力组成,其中线性控制力为
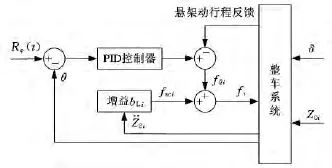
图5 ASS系统控制框图

式中,bLi为轮胎i处悬架的线性控制增益。
主动悬架协调控制器输入量为实际车身俯仰角和悬架动行程,设定车身俯仰角参考值Rθ(t)=0。将俯仰角的参考值与实际值的差作为PID控制器输入,同时考虑悬架动行程反馈,得出协调控制器附加作用力fθi,综上可得主动悬架作用力fi:

2.2 主动横向稳定杆控制策略
如图6所示,主动横向稳定杆控制原理如下:给车辆前轮作用一个角输入,将车辆模型输出的侧向加速度分别输入线性控制器和车身侧倾角参考模型,经线性控制器输出主动横向稳定杆线性抗侧倾力矩Manti1;将车身侧倾角参考模型输出的侧倾角参考值与车辆动力学模型输出的侧倾角实际值的差作为PID控制器的输入量,并输出主动横向稳定杆的补偿力矩Mcomp,将Mcomp与Manti1叠加得到主动力矩Manti,并将其输入到整车系统中。线性控制曲线和车身侧倾角参考模型曲线如图7、图8所示。

图6 主动横向稳定杆控制框图

图7 抗侧倾力矩参考值
如图7所示,侧向加速度ay比较小时,抗侧倾力矩增加较小,以保证乘坐舒适性;随着侧向加速度的增大,抗侧倾力矩能迅速增大,以保证汽车的操纵稳定性与安全性。设计抗侧倾力矩表达式为

图8 车身侧倾角参考值

式中,Manti、ay的单位分别为N·m和m/s2。
汽车多数行驶工况下的侧向加速度值小,因此,车身侧倾角参考值在侧向加速度较小的范围内保持零值;随着侧向加速度的增大,车身侧倾角参考值随之在合理范围内线性增大,以保证汽车各性能参数之间保持协调和均衡。
3 系统仿真结果与分析
为了验证集成控制系统的有效性,根据式(1)~式(23),本文在 MATLAB/Simulink中建立整车动力学模型及集成控制模型,并对不加控制的被动系统和加入集成控制的主动系统以及主动悬架与主动横向稳定杆单独控制4种不同情况进行仿真,仿真所用部分车辆参数如表1所示[7]。

表1 部分仿真参数表
假设车辆以20m/s的速度匀速行驶于B级路面上,且给前轮以幅值为3°的阶跃输入,如图9所示。

图9 前轮转角输入

图10 车身侧倾角对比图
通过 MATLAB/Simulink仿真得到相关数据并绘出图形。从仿真结果(图10~图14、表2)可以看出,采用主动悬架与主动横向稳定杆的集成控制可以使汽车操纵稳定性和平顺性达到良好的效果。由图10、表2可知,集成控制和主动横向稳定杆单独控制使得车身侧倾角均方根较被动系统和主动悬架单独控制减小50%以上,有效抑制了侧倾倾向的增加,体现出主动横向稳定杆的有效性。

图12 悬架动行程对比图

图13 轮胎动载荷对比图

图14 车身俯仰角对比图
由图11、表2可知,集成控制和主动悬架单独控制相比,被动系统及主动横向稳定杆单独控制能够明显降低车身垂向加速度,提高乘坐舒适性;主动横向稳定杆单独控制与被动系统相比,车身加速度无改善。此外,从表2、图12、图13可以看出,主动横向稳定杆单独控制和集成控制能够显著减小悬架动挠度与轮胎动载荷,提高了汽车乘坐舒适性和行驶安全性。由图14、表2可知,集成控制与主动悬架单独控制相对被动系统和主动横向稳定杆单独控制能够明显降低车身俯仰角的幅值。

表2 汽车系统性能参数对比
[1]姜炜,余卓平,张立军.汽车底盘集成控制综述[J].汽车工程,2007,29(5):420-425.Jiang Wei,Yu Zhuoping,Zhang Lijun.A Review on Integrated Chassis Control[J].Automotive Engineering,2007,29(5):420-425.
[2]中国汽车工程学会.世界汽车技术发展跟踪研究[M].北京:北京理工大学出版社,2008.
[3]Poussot V C,Sename O,Dugard L,et al.A New Semi-active Suspension Control Strategy through LPV Technique[J].Control Engineering Practice,2008,16:1519-1534.
[4]Yoshimura T,Nakaminami K,Kurimoto M,et al.Active Suspension of Passenger Cars Using Linear and Fuzzy-logic Controls[J].Control Engineering Practice,1999,7:41-47.
[5]Gao Huijun,James L,Wang Changhong.Multi-objective Control of Vehicle Active Suspension Systems via Load-dependent Controllers[J].Journal of Sound and Vibration,2006,290:654-675.
[6]陈无畏,周慧会,刘翔宇.汽车ESP与ASS分层协调控制研究[J].机械工程学报,2009,45(8):190-196.Chen Wuwei,Zhou Huihui,Liu Xiangyu.Simulation Research on Layered Coordinated Control of Automotive ESP and ASS[J].Journal of Mechanical Engineering,2009,45(8):190-196.
[7]袁传义.半主动悬架与电动助力转向系统自适应模糊集成控制及其优化设计[D].镇江:江苏大学,2007.
[8]段小成.多功能运动型汽车侧倾主动控制仿真研究[D].武汉:华中科技大学,2006.
[9]Sorniotti A,D’Alfio N.Vehicle Dynamics Simulation to Develop an Active Roll Control System[C]//SAE World Congress & Exhibition.Detroit,Michigan,USA,2007:2007-01-0828.
[10]Danesin D,Krief P,Sorniotti A,et al.Active Roll Control to Increase Handling and Comfort[C]//SAE World Congress &Exhibition.Detroit,Michigan,USA,2003:2003-01-0962.
[11]Matthew S D J.Active Roll Control of Articulated Heavy Vehicles[D].Cambridge,UK:Cambridge University,2000.
[12]宗长富,朱天军,郑宏宇,等.二次型最优控制的半挂汽车列车主动侧倾控制算法研究[J].中国机械工程,2008,19(7):872-877.Zong Changfu,Zhu Tianjun,Zheng Hongyu,et al.Research on Active Roll Control Algorithm of Heavy Tractor Semi-trailer Based on LQG/LTR[J].China Mechanical Engineering,2008,19(7):872-877.
[13]Jeon K,Hwang H,Choi S,et al.Development of an Electric Active Roll Control(ARC)Algorithm for a SUV[J].International Journal of Automotive Technology,2012,13(2):247-253.
[14]丁能根,余贵珍.汽车动力学及其控制[M].哈尔滨:哈尔滨工程大学出版社,2009.
[15]陈杰平,陈无畏,祝辉,等.基于 Matlab/Simulink的随机路面建模与不平度仿真[J].农业机械学报,2010,41(3):11-15.Chen Jieping,Chen Wuwei,Zhu Hui,et al.Modeling and Simulation on Stochastic Road Surface Irregularity Based on Matlab/Simulink[J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(3):11-15.
